1. 引言
随着我国经济的持续发展和城市化进程的加速,地铁交通已经成为城市发展的不可或缺的组成部分,对地铁隧道的安全保护需求日益凸显 [1] 。隧道巡检是地铁运营和维护的重要环节,为了保障地铁隧道的安全运营,必须对地铁隧道的结构和状态进行实时监测和准确的沉降预测,以及时发现问题并采取预防措施。
数字孪生技术是当前仿真技术的巅峰,在虚实交互和创新决策方面具有先进优势。近年来,城市基础设施管理中数字孪生技术的应用成为研究的焦点。Rosen等利用数字孪生技术实现了真实物理数据与虚拟数据的映射,提高了生产系统的抗干扰性和自主性;Schroeder G N等应用数字孪生技术对物理设备进行建模,并提出了一种基于Automation ML标准的数字空间与物理实体数据交换的方法 [2] 。数字孪生技术的应用使真实环境与虚拟模拟更加紧密融合,为城市基础设施的高效运行和管理提供有力支持。
当前在综合地铁隧道运营监测、人员安全监护、机器人自主作业等应用中,一个突出的问题是缺乏面向立体空间的精准位置映射分析技术。与此同时,地铁隧道的信息化建设不足,导致地铁隧道对安全风险的感知薄弱,应急救援效率低下,易酿成严重后果。此外,地铁隧道设备信息平台的虚实映射交互能力不足,难以支撑隧道生产运行、安监管理等业务的创新与智能互动。鉴于隧道复杂的内外环境条件,充分应用人工智能、大数据、物联网等新技术,并以数字孪生技术为依托,构建地铁隧道数字孪生巡检系统应用于地铁隧道运营非常重要。
针对地铁隧道沉降和变形监测,国内外学者已开展广泛的研究。林菲菲运用长短期记忆网络(LSTM)提升了地铁隧道沉降预测效果;姚凯等采用广义回归神经网络结合FOA算法成功预测隧道围岩变形。随着人工智能和深度学习的发展,机器学习在地铁隧道沉降预测方面取得显著成果,人们借助卡尔曼滤波模型、反向神经网络(BP神经网络)、灰色理论法等方法,有效预测隧道沉降。为地铁隧道运营期间的安全提供了可靠预测手段。
本研究将数字孪生技术应用于地铁隧道安全运营领域,通过构建地铁隧道数字孪生系统,对隧道进行全生命周期管理,以此来对隧道的病害监测、椭圆度检测、沉降预测。系统采用三维建模技术,一比一还原隧道环境,并利用数字孪生技术和多种通信网络,实现地铁隧道的智能重构、数据互联、感知交互和虚实协作。结合隧道巡检无人车,通过三维激光扫描和多传感器图像融合技术对隧道内部进行结构和病害检测,大大提高了检测效率和精度、降低人工巡视的风险,还能利用先进的数据分析和人工智能技术对检测结果进行深度解析,实现对隧道健康状况的持续和准确监测。
2. 隧道无人巡检车
为实现隧道的无人巡检并对隧道内部数据进行采集,本研究设计了一款专用于此目的的隧道无人巡检车。该巡检车能够进行结构检测和无人巡查,并将采集到的数据用于完善构建隧道的三维孪生体模型。该巡检车集成了非接触探地雷达检测系统、CCD工业相机检测系统、车载式三维激光扫描系统等三大系统,形成了一种新型综合检测装备。该车能够实现自主或远程驾驶,利用高精度传感器、扫描仪和其他检测设备,在隧道内部进行各种病害检查和椭圆度检测。它能够准确发现和定位隧道内的问题,通过空间计算技术同步到数字孪生体,并将结果实时反馈给操作人员。如图1所示为设计的巡检车底盘结构图。
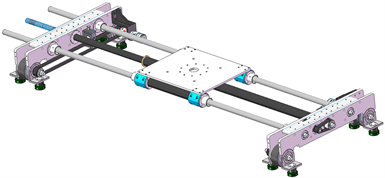
Figure 1. Structural diagram of the chassis driven by a small car
图1. 小车驱动底盘结构图
2.1. 运动控制模块
隧道无人巡检车是专门为隧道内部检测和巡查而设计的自动化设备,通过集成传感器模块、定位导航系统、运动控制和通信模块,实现小车在隧道内的准确定位、高效路径规划和稳定运动。其中运动控制模块是关键的技术组成部分,负责确保小车在隧道内精准行驶,完成各项检查任务,该模块采用先进的动力方案,保证小车在巡检过程中表现出色。
巡检小车的动力方案采用RM3508电机与C620驱动器的组合。RM3508电机具有卓越的性能,可实现对转速和位置的高精度控制,确保小车在隧道内精准行驶;电机配置为峰值功率240 W,使得小车能够在轨道上平稳、持续地运行,适应不同巡检任务的需求;具有三个电机配置,其中一个电机专门用于变距,提升了小车在隧道内的灵活性,有利于适应多样化的隧道结构;C620驱动器能够有效控制电机的速度和位置,提供稳定的电力输出,确保小车在不同工况下的可靠性。
采用SLAM算法和视觉里程计,结合激光雷达和摄像头数据,实现了小车在隧道内的准确定位。路径规划考虑了障碍物避让和任务需求,确保了小车沿着规划路径稳定行进。利用PID控制器对电机进行速度和位置控制,灵活调整小车速度以适应不同巡检任务的需求。如图2所示为电机驱动算法示意图。

Figure 2. Schematic diagram of motor drive control algorithm
图2. 电机驱动控制算法示意图
通过通信模块实现对小车的远程监控和操控,将运动控制算法嵌入小车中,实现小车的自主和人为控制巡检,同时实时传输传感器数据和巡检结果,供操作人员进行实时分析和决策。将人工智能算法应用到小车的控制系统中,提升小车对隧道内异常情况的识别能力,为隧道巡检任务提供了稳定可靠的运动支持,实现了高效、精准的隧道智能检测和巡查。
2.2. 信息采集模块
隧道无人巡检车搭载多种传感器和检测设备,其中车载隧道扫描仪作为主要的信息采集模块。该模块包含激光雷达、CCD工业相机、红外摄像机等,可精准获取工作范围内无死角的高分辨率影像及断面数据,通过智能识别与算法优化实现对隧道内环境和结构的监测。
为了实现对隧道数据的精准采集和确保巡检过程的有效进行,扫描仪搭了905 nm安全波长的激光光源,确保扫描的安全性并提供足够的激光能量,使得光束能够在扫描区域内精确定位。本文设计的扫描仪采用双玫瑰线式扫描技术,通过将激光光源与特定的扫描路径相融合,实现更短时间内完成更多数据采集,从而实现更快速、均匀和精确的扫描过程。该技术的核心在于扫描路径的设计,将扫描区域被划分为多个子区域,通常以网格状排列,然后通过两个相对的玫瑰线路径,这两条玫瑰线路径在扫描过程中以旋转的方式交替出现,实现对每个子区域的覆盖,提高了扫描效率并有效减少了数据不一致性。
对得到的扫描数据进行数据预处理,对于具有非重复扫描机制的激光雷达,扫描数据被累积到一个帧中,形成一个密集的点云;然后将密集的点云和照相机图像进行直方图均衡化,增强图片的对比度,使得在精细配准步骤中使用的NID度量与均匀强度分布更为匹配;在输入图像和点云之间确定2D~3D对应关系,为激光雷达–照相机变换提供参考点;从密集的点云中利用虚拟照相机模型生成激光雷达强度图像,以更好地与实际照相机图像对应;使用SuperGlue流程进行图像匹配,先在图像上检测关键点,然后在关键点之间寻找对应关系。数据预处理的目的是为了确保激光雷达与照相机采集的数据能够在后续步骤中准确对齐,这个过程确保了3D点云的颜色信息与实际物体表面的颜色一致,为后续的3D点云重建、渲染和隧道的病害检测和分析提供了准确的基础数据 [3] 。
根据采集到的隧道数据,可以计算隧道截面的椭圆度,进而实现对隧道结构的监测,以便及时发现并解决问题。椭圆度计算方法为:首先获取点云数据,通过计算点云的均值(即所有点的中心)以及使用奇异值分解(SVD)找到最佳拟合平面;SVD可以将矩阵分解为其构成要素,找到数据中的主要元素,用于确定点云数据最分散的方向,该方向垂直于最佳拟合平面;确定了最佳拟和平面后,将原始三维点云数据投影到这个二维平面,通过计算每个点到平面的垂直距离,然后从每个点中减去这个距离乘以平面的法线向量来实现;投影到二维平面上的点可以用来拟合椭圆,通过最小二乘法找到一个椭圆,使得所有点到椭圆的总距离最小;最后通过椭圆的参数,可以计算长轴长度和短轴长度,得到隧道截面的拟合椭圆度数据,用于对隧道的形变进行分析。
隧道巡检小车的应用不仅可以提高检测效率,降低人工巡视的风险,而且通过利用先进的大数据分析和人工智能技术,还可以对检测结果进行深度解析,从而实现对隧道健康状况的持续和准确监测。
3. 隧道数字孪生系统平台
数字孪生技术为地铁隧道的智能运维提供了创新的数字化解决方案。复杂环境地铁隧道数字孪生系统采用三维建模,一比一还原隧道环境,通过数字孪生技术和多种通信网络的综合应用,实现了地铁隧道的智能重构、数据互联、感知交互和虚实协作。系统充分利用历史数据和实时传感器数据,能够全面刻画和反映地铁隧道内物理对象的全生命周期过程,提供精准的空间映射、故障诊断、沉降预测、信息平台虚实映射以及多传感器可视化等功能,从而显著提高地铁隧道的安全管理和设备维护效率 [4] [5] [6] [7] 。系统中的部分内容示意如图3所示。

Figure 3. Functional distribution of digital twin system platform for subway tunnels in complex environments
图3. 复杂环境地铁隧道数字孪生系统平台功能分布

Figure 4. Main interface of digital twin system for subway tunnels
图4. 地铁隧道数字孪生系统主界面
该系统模型以杭州地铁为基础进行建模。通过点云扫描、CAD图纸和照片比对等方式,采用三维激光扫描仪对整个隧道进行现场扫描,并对关键部位进行拍照,以获取1:1点云数据。随后,将点云数据导入专业三维建模软件,结合照片佐证进行渲染,实现隧道的三维建模,完成整个地铁隧道的数字孪生系统建设。该模型能够全方位展示隧道内各设备的分布和内部结构,同时具备状态监测和远程控制的功能,借助Unity引擎的强大渲染能力,系统能够以仿真方式展现三维地铁隧道实景,实现地铁隧道数字孪生的实时监控,为隧道提供数字化支持。地铁隧道数字孪生系统以精细化的3D数字孪生体模型为基础,融合多媒体视频、人工智能和大数据分析等先进技术,构建地铁隧道数字孪生体。这一体系支持视频监测、环境监测、环流在线监测等功能。通过接入IoT设备效提升了地铁隧道实时状态掌控能力,同时增强了隧道的管控、巡检作业和安全保障等方面的工作效率,有效的降低了一线人员的劳动强度,助力地铁隧道管理的数字化转型升级 [8] [9] 。
如图4所示为地铁隧道数字孪生系统的主界面,当系统开始运行时,系统会通过布置在现场的传感器获取现场数据和实时监控画面,使其与现场实际情况保持映射关系,以实现对地铁隧道的实时监测和远程运维。
3.1. 隧道巡检模块
隧道巡检模块涵盖远程巡视和异常告警空间标注两方面功能,通过这两个功能,本系统实现了对地铁隧道的实时监测和故障标记。巡检人员可利用巡视模式,在隧道内部中漫游,查看隧道内的传感器数据和视频监控画面,快速定位问题并标注故障信息。
远程巡视功能分为标准巡视、三维巡视和缺陷巡视三个模式。在标准巡视模式下,巡检监控展示了站端的巡检任务列表,可进行任务的新增和执行,可查看巡检任务单详情及执行的任务进度,并实时关联视频,同时展示了地铁隧道环境信息、设备运行状态以及巡检的实时信息及报警信息。在三维巡视模式下,利用空间视野分析技术,在三维场景中任意选取关注点,平台会对任意空间目标自动计算并聚焦于此,通过折线图的形式展示了该点位的历史沉降信息,同时也可以查看对应的视频监控画面,为人员管控、现场巡视以及作业现场督察提供了有效手段。在缺陷巡视模式下,可以根据实际巡检发现的缺陷,通过三维标注的方式,自动关联调用三维巡视模块 [10] 。
异常告警空间标注功能包括远程巡视故障三维标注、传感器触发故障三维标注和现场巡视故障告警三维标注。远程巡视故障三维标注通过空间计算技术,将监控设备与数字孪生地铁隧道关联,远程巡视发现的故障、异常,自动将告警信息标注到地铁隧道数字孪生体。传感器触发故障三维标注是通过将传感器实际安装的空间位置与数字孪生体内的传感器位置映射关联,当实际场景中发生突发状况,如可燃气体成分突然增加等情况,系统会将故障、缺陷、应急事件的位置直接投影到数字孪生体上,同时还能调用附近监控系统实时查看告警点信息,方便后台专家判断和处理告警。现场巡视故障告警三维标注通过可穿戴式智能设备,标注在现场巡视中发现的故障和缺陷,应用空间计算技术,将巡视所发现的故障、缺陷实时同步到数字孪生体。
3.2. 智能交互与三维展示模块
通过全双工不间断语音通话和增强现实图像标注,实现现场工作人员与远程专家之间的实时沟通和问题处理。这一模块借助增强现实技术,使现场人员可以直观地查看设备信息和操作步骤,从而提高工作效率。
全双工不间断语音通话功能通过在远程指导服务平台上的电话会议模块实现。该模块支持地铁隧道现场不同位置人员和远端支持人员同时进行电话会议,后方专家可在PC端和现场工作人员的可穿戴式智能设备上主动发起电话会议。通过平台预制的联络人,对方可通过平台连线进入电话会议,PC端或可穿戴式智能设备端振铃提醒。此外,后台管理涵盖电话服务器配置信息、数据编码、加密方式、通话质量、端口等方面的设置。
增强现实图像标注功能使实现后端专家能够预制一些三维标注用模型,例如箭头、开关、拍照、重启等,这一功能通过远程指导服务平台将后端专家标注的内容同步到可穿戴式智能设备端,并通过增强现实技术显示。此外,功能还包括:后端专家的PC端操作与现场环境通过数字孪生技术的空间同步;标注文字内容添加,后端专家的PC端可以输入文字,文字会在可穿戴式智能设备端增强现实显示;三维标注的添加、修改、删除和操作展示;通过虚拟内容叠加,后端专家将数字孪生设备三维模型和相应的操作步骤叠加到现场三维场景中,如办公桌上,并通过增强现实显示 [11] 。
现场维护远程协助功能可以实现在PC端实时播放现场增强现实视频;在PC端开发增强现实视频二维平面与可穿戴式智能设备现场三维空间之间的映射关系,同步PC端视频位置与现场的三维空间位置;可穿戴式智能设备端具备高分辨率截图上传功能,远端专家可以在截图上绘制或输入问题解决步骤,实时传输给前方相关辅助内容、标注提示或者虚拟内容叠加到实际场景,现场人员看到的输入内容不会因为头部转动而标注到其他物体上,可以极大提升专家沟通和问题处理效率。这也更好地发挥人工智能、知识图谱等技术优势,推动设备维护智能化、高效化发展。
3.3. 故障诊断与沉降预测模块
通过综合诊断和沉降预测功能,对地铁隧道设备进行状态评价和潜在故障预测,以便及时采取维护措施,降低安全风险。在综合诊断中,将电缆线路分为“正常状态”、“注意状态”、“异常状态”和“严重状态”,并根据技术标准整合停电试验、带电检测、在线监测等技术手段,收集地铁隧道整体设备状态信息。通过应用状态检修辅助决策系统,进行设备状态评价,形成地铁隧道整体状态评价 [12] [13] [14] 。
在沉降预测方面,采用机器学习方法建立隧道沉降预测模型。首先对采集到的隧道原始数据进行构造和预处理,清洗异常值和噪声,确保数据的质量和可靠性,得到更适合训练的数据集。通过最小–最大归一化方法,将原始数据缩放到特定范围,消除不同特征之间的量纲差异,提高模型的训练速度和精度,鉴于隧道沉降数据的时间序列特性,采用滑动窗口等方法进行时间序列处理,提取有效的时间特征,以增强模型对时间变化的敏感性 [15] [16] 。
借鉴深度学习框架,对Transformer模型进行优化,包括多头自注意力机制和前馈神经网络层,以更好地捕捉数据中的关键信息和非线性关系 [17] 。通过对数据的训练,为每个数据组建立了预测模型。训练过程中采用Adam优化算法,结合自适应学习率机制,加速模型参数的更新,提高模型的收敛速度和准确性 [18] 。模型预测效果通过均方根误差(RMSE)、平均绝对误差(MAE)、平均绝对百分比误差(MAPE)等性能指标来评估,其中:
 (1)
(1)
(2)
(3)
式中:
为真实值,
为预测估计值,n为数据数量。
通过绘制预测结果与真实值的对比图表,直观展示模型的预测效果,以供决策者提供参考。提前发现隧道的沉降情况,有助于规划和实施有效的维护计划,及时采取安全措施,减少潜在的地质灾害风险,从而降低安全风险,确保地铁系统的安全运营。
4. 结束语
本论文以数字孪生技术为基础,综合运用地铁隧道环境智能重构、数据互联、感知交互、业务协作等多方面共性支撑技术,并结合多种通信网络,构建了地铁隧道智能管理数字孪生系统。该系统不仅提供了更高层次的隧道虚实协作应用,还实现隧道全生命周期更高效管理。
在系统的应用方面,本论文结合隧道无人巡检车,为地铁隧道设备提供全域和全生命周期的管理支持。通过该系统,能够实时监测隧道的结构状态,借助机器学习方法实现了对隧道的沉降预测,以便及时发现问题并采取有效措施。通过地铁隧道运维的三维可视化监控,提升了隧道数字化监控水平。实现对隧道内的大量设备和隧道结构的智能巡视和故障预防,提高了管理效率,降低了维护成本。通过运用该系统进行隧道结构现场检测、隧道沉降预测、结构安全评估,并最终制定合理的养护或修复方案,有助于有效降低地铁隧道因各种病害引起的结构安全性风险,全面提高地铁隧道的安全管理和设备维护效率。
本研究对于地铁隧道数字孪生系统的设计与应用具有积极的实际意义,为未来地铁隧道安全管理和维护工作提供了有力的技术支持。随着数字孪生技术的不断发展,相信本系统将在地铁行业的智能化和安全管理方面发挥重要作用。
参考文献