1. 引言
管道运输因为其成本较低、安全可靠、使用方便等特点,已经成为了最重要的运输方式之一 [1] 。我国的管道承担着油气运输的重要责任,是我国国民经济的命脉。在建设管道时通常会掉入一些杂质,如泥土、石块、焊渣等;在管道运行时,管道输送介质也会带入一些杂质,如蜡、原油沉淀物、缓蚀剂等。另外,随着管道的运行时间久远,管道会因腐蚀、破损、变形等掉入杂质,尤其以铁化物居多。这些杂质对管道的安全运行造成极大威胁 [2] ,需要及时清理。清管器在其中发挥了重要的作用,但清管器在清管过程中遇到管道弯曲过大、管道凹陷等情况会发生堵塞,如果不能及时找到清管器并修复管道将对油气管线作业造成安全隐患,对经济生产造成重大损失 [3] [4] [5] 。
2. 相关检测
在众多科研和应用领域中,准确检测微弱信号至关重要,因为这些信号往往深深埋藏在强烈的背景噪声之中。在应对微弱正弦信号这一常见测量任务时,传统的带通滤波方法存在着较大的困难。为了解决这个问题,人们普遍关心如何利用信号和噪声的统计特性,应用互相关滤波原理来实现检测 [6] ,这一方法在微弱信号检测中扮演着重要角色。
如果检测到的信号是周期性的,则与噪音有本质的不同。信号是有规则的,并且是可重复的,随后的信号是与前面的信号相关的,可以用一个确定的时间函数来描述 [7] [8] [9] [10] 。噪音具有随机性和非重复性,并且在不同时间点上没有相关性。这样,就能更好地利用信号本身所具有的规则性或相关性,对信号进行检测。另一方面,还可以利用已知的信号,使他的规则部分符合被测量的信号,从而达到对被测量的信号的探测。
两个随机信号可能会有一样的期望和方差,却可能存在完全不同的属性。此时,另一个重要特征参数用于区别信号,即相关函数 [11] 。客观事物变化之间的相依关系就是相关。在统计学中,变量x、y之间的相关性由相关系数描述,即式(1):
(1)
式中
、
为随机变量x、y的平均值;
、
为随机变量x、y的均方根值;
为随机变量波动量乘积的数学期望,称为协方差或相关性;
为无量纲的系数,
。
当
时,说明x、y变量之间符合理想的线性关联;当
时,表明x、y两变量间完全无关;当
,表示两变量之间部分相关。
如果研究的随机变量x、y是时间依赖函数,这时相关系数与x(t)和y(t)之间的时移
有关,即式(2):
(2)
假定能量信号x(t)和y(t)不含直流分量(信号平均值为0)。因此分母是一个常值,分子是时移
的函数,描述了两个信号的相关性,称之为相关函数,定义为式(3):
(3)
同一信号不同时刻之间的幅值的相关性可以通过相关函数来描述。如果x(t)是能量有限信号,则定义它们的相关函数为(4):
(4)
如果
是功率有限信号,由于功率函数在
区间内是不收敛的,因此由式(4)定义的相关函数不适用。此时,通常对时间T内的两个值的乘积进行平均,然后对时间取极限以获得
的相关函数为(5):
(5)
根据相关函数的定义,
是以
为自变量的实值偶函数。当
,
取得最大值。当随机信号没有周期分量时,相关函数将从最大值开始,随着
值的增加逐渐而减小。其衰减的快慢,反应了该随机信号在时间上的相关性的大小。其衰减的越快,表示随机信号
与
之间的相关性越小;当
逼近无穷时,相关函数
逼近于
平均值的平方;如果均值为零,则
随
的增大也逼近于零。当其有周期分量时,相关函数
内也将有同周期的分量。
相关器可视为相关函数的物理模型 [12] ,即式(3)中运算的具体形式。这个设备的作用是通过对信号进行特定的运算来实现相关 [13] 。图1为定位接收机中相关运算模块结构图。包括接收探头的信号处理部分、微处理器锁相与移相部分、相乘部分和低通滤波部分。
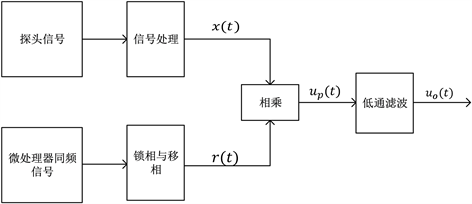
Figure 1. Related operational structure diagram
图1. 相关运算结构图
利用乘法运算将两个已处理的信号乘积,从而可以辨识并区别被测试信号中所含的信号和噪声,随后低通滤波器滤去相乘后的高频部分。相关运算的本质是对已经辨识并加以区别的噪声进行过滤与消除,从而准确地检测待测信号。将辨识信号设为频率为f余弦波,则只有频率等于识别信号f的成分可以被有效地检测到。因此,在参考信号为另一种波形的周期性信号时,可在被测信号中对含有与参考信号波形相符的信号成分进行有效检测。
3. 极低频磁信号定位法
3.1. 发射频率选择
在实际应用中,电磁波在传播时,会通过不同的媒质,不同的媒质对电磁波的干扰作用是不同的 [14] 。
3.1.1. 电磁系数K
地下管线中的电磁波在传输至地表接收探头时,要通过管壁与地层的双重吸收与衰减。在交流电磁场作用下,该衰减程度受被测物体的电磁特性的影响,其主要指标为:电阻率
、介电常数
和电磁系数K [15] [16] 。
电磁波在传导过程中,电磁系数K的表达式 [17] 为:
(6)
换成实用制单位,
,
则
(7)
3.1.2. 电磁波的传导特性
当电磁波穿过导电介质时,因为电磁波会被媒介吸收,从而降低场强,使部分能量转变成热能,使得介质发热。通过传导媒介吸收电磁波时所产生的场强降低呈指数关系 [15] ,即
(8)
公式(8)中,K是比例系数,N是线圈的匝数,S是线圈的面积,I0是发射线圈中的电流强度,r表示距离,而b是由介质性质决定的吸收系数。吸收系数b的计算可以采用公式(9):
(9)
式中
为介电常数,C为真空中的光速3 × 105 km/s,
为导电率,
为角频率
。
式(9)中,
时,吸收系数b为0,且随频率升高而增加 [15] [16] ,但仅在f<107Hz时成立。随着频率的持续增大,b逐渐减小,即
(10)
从吸收系数随频率的变化可以看出,随着电导率的降低曲线b逐渐向渐近线靠近。此外,当频率提高时,吸收衰减也会增大。
当频率f很低时,
则
(11)
3.1.3. 最佳频率
综上所述,为了达到最大的探测深度并高效的传输,就必须采用较小的波段来降低介质对电磁波的吸收。可以用公式来表达频率和探测深度之间的关系 [18] :
(12)
鉴于管线埋深h (单位为m)以及表层土壤的电阻率(单位为Ω/m),通常钢管的电阻率在0.1 Ω/m左右,而表层土壤的电阻率在10~100 Ω/m。假定埋设深度为10 m,取
,则
(13)
在土壤的电阻率较低的情况下,必须减小相同的倍数,以维持最优的工作频率。由于湿润土壤电阻率只有2 Ω/m,而管道电阻率为0.1 Ω/m,需将其频率降低2000倍,使其达到最优工作频率。从实用角度出发,可选用23 Hz的频率 [19] 。
3.2. 定位接收机设计
为了准确检测到清管器发射的极低频磁信号,研制了基于相关运算的磁定位接收机,来接收判断清管器磁信号并通过4G网络发送通过时间以及位置等信息。
定位接收机由4G模块、处理器模块和电源模块组成。处理器模块主要由STM32ZET6作为处理器,生成两个与目标信号同频的参考信号,然后进行相关运算。处理器模块还具有低功耗休眠功能,开机后检测清管器通过发送信息后进入低功耗休眠状态,等待下一次唤醒。4G模块采用市场上的产品,本实验使用的4G模块,使用方便,远传效果较好,如图2。电源由8节5号干电池组成,可持续工作300 h,干电池使用稳定,替换较为方便。
3.2.1. 磁信号定位法工作原理
当清管器搭载磁信号发射机在管道运行经过定位接收机下方时,探头与发射机发射的超低频磁场发生耦合,导致探头产生感应电压 [16] 。电压信号在定位接收机中相关运算后经过微处理器分析和判断处理,将正确通过信息通过4G模块传送至上位机。在上位机的显示界面上,实时显示通过的位置和时间。由于探头的摆放位置会影响发射机磁信号的接收,故需要将探头埋入土壤,并与管线平行,确保为最佳检测状态,如图3,清管器定位接收机预埋到指定位置,开机后进入工作状态,实现清管器定位追踪和无人值守 [20] 。
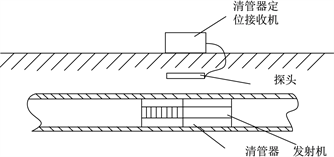
Figure 3. Working principle diagram of the pig positioning receiver
图3. 清管器定位接收机工作原理图
3.2.2. 定位接收机硬件设计
定位接收机硬件电路框图如图4,清管器定位机通过探头天线接收磁脉冲信号,通过滤波放大处理后分为两路待测信号,同时定位机通过带晶振的单片机生成两路参考信号,该参考信号与发射机所发出的不连续脉冲信号相匹配。这两路待测信号分别于两路参考信号进行相关运算,随后将两路运算结果进行相加,根据相关理论,可以有效地抑制各种类型的干扰。经由AD变换后,由单片机获得所需的转换数值。经微处理器智能判断,确定是否成功找到清管器。
处理器模块控制清管器信号检测、数据远传和声光显示,并同步时间信息和位置信息,通过4G模块同步并发送。定位接收机将LCD显示、蜂鸣器和按键等模块集成,各项参数可以通过信息交互设置,通过上位机远程控制。4G模块在发送数据时先采集位置信息,通过时钟校准修正时间。同时预留了人机交互接口,方便拓展更多的功能 [21] 。
定位接收机的功能多样性体现在使用模块化集成,可以通过增删模块成为通过指示器或者寻迹追踪仪,方便清管器丢失后人工寻找清管器。可根据实际需求修改模块,以求达到最优的应用。

Figure 4. Hardware circuit diagram of positioning receiver
图4. 定位接收机硬件电路框图
3.3. 上位机设计
由于国内区域跨度大,地区环境各不相同,需要开发对应的上位机软件。本次实验开发了配套的清管器精准定位系统,并内置了国内地图 [20] 。
清管器精准定位系统收到传回的信息后,软件自动读取时间和位置信息,分析数据并通过上位机显示界面显示。清管器精准定位系统需要预先输入定位接收机坐标,输入完成后上位机会将相对应的坐标点显示并连接,形成一条管线。上位机工作流程如图5。
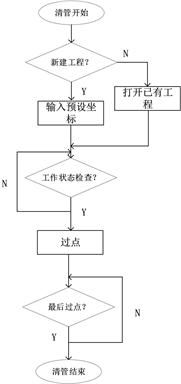
Figure 5. Upper computer workflow diagram
图5. 上位机工作流程图
清管开始前需要先打开上位机,确保是在联网状态。清理新的管线需要新建工程,然后输入预设坐标。如果是清理过的管线且预设坐标未改变,可以打开之前已有的工程重新开始清管,若是清理过的管线预设坐标有改变,则不能再使用之前的工程,需要重新创建。工程建好并输入预设坐标之后,上位机会在界面显示管道路线。随后上位机自动开始检查是否与各个定位接收机连接,连接成功后进入接收工作状态,若未连接成功上位机会不停检查,直至成功连接。清管器每通过一个点回传信息分析后会点亮对应的点并显示通过时间,并生成对应的文件,记录信息。当所有的点都通过后上位机界面会显示清管完成,工作人员要查看需要通过导入保存的文件在上位机复现。
4. 现场应用
清管器精准定位系统已经在国内多条管线成功应用,覆盖国内大多数区域环境,在4G信号覆盖良好的区域均成功显示,现场应用如图6。
在我国某西北油田测试一条超过80 km的管线,使用了40个定位接收机,途中存在完全没有信号的情况,这些点未显示。另外,由于区域跨度较大和信号较差等原因,回传的信息存在延时,但最后成功显示。最后响应39个点,显示38个点,1个点无网络未显示,测试数据报告如表1。
本次测试中,还有现场工作人员手持设备作为对照组。在第五个点测试时,人工未检测到清管器通过,定位接收机成功检测并在上位机显示;在第8至13个点,人工和定位接收机均成功检测到清管器;在第24点,人工和定位接收机均未检测到清管器,通过观察环境得出判断,该点位附近为沙丘地貌,由于风沙影响,使得沙丘高出地面超过8 m,算上管道埋深,沙丘高出管道超过10 m,故没有检测到清管器,但在下一点位成功检测。
在过去寻找清管器只能依靠人工手持设备沿管线追寻,相互之间沟通只能通过电话交流,费时费力,而且野外作业存在未知的危险。现在定位接收机能做到精确检测到清管器并且回传信息,实现无人值守,保障了油气管线作业和工作人员安全。
5. 总结
管道清理需要准确知道清管器的位置,防止发生堵塞情况下造成人员伤亡和巨大经济损失。由于管道本身存在天然的屏蔽效果以及埋地介质等影响,使得清管器跟踪定位有很大的困难。基于相关检测的磁定位清管器智能跟踪定位通过定位接收机、4G网络和配套上位机实现了清管器的无人值守情况下的追踪定位。相比较以往通过简单磁场强度判断清管器通过情况,本实验采用相关检测进行优化,通过微处理器智能判断,极大减少了误报漏报情况,能够抵抗复杂的自然环境,实现精准判断。本实验通过现场测试,具有良好的表现,可以为清管作业提供更多的方案,提高检测的精度和可靠性,减少了人工成本和清管作业成本。
NOTES
*通讯作者。