1. 引言
电液伺服控制系统因其功率密度大、负载能力大等优点而广泛运用于各工业领域 [1] [2] 。随着生产力的不断提高,针对电液伺服控制系统的控制需求也不断提高,越来越多的行业针对液压系统的远程控制性能提出了更高的要求。例如水下工程系统中对于工程机械的运行和航空航天作动系统精确控制等情况 [3] [4] 。工业领域内通过网络化控制可以实时监控和远程操作工业系统,并且能够有效减少设备的维护和运营成本,提供灵活性和可扩展性。而这些特点与液压系统的运作机能高度贴切,为液压系统供了实时监测和远程操作的能力,支持故障诊断和预测性维护,为未来的工程和技术发展提供了广阔的前景。
共享网络的使用也带来了一系列的问题,如网络诱导时滞、数据包丢失、网络拥堵和网络安全等问题,这些由网络引起的问题有可能会造成控制系统控制性能变差甚至使系统失去稳定性,这使得网络控制系统的设计也变得十分复杂 [5] [6] [7] [8] 。因此在通信约束的条件下如何减少数据的冗余量成为研究的主要重点。Guo等 [9] 提出了一种状态反馈形式的控制器应用于具有有限通信通道的网络控制系统。Li等 [10] 针对具有丢包和量化的网络控制系统,提出了一种基于伯努利过程模型的滑模控制器。Su等 [11] 研究了一种基于事件触发机制的连续时间动态滑模控制问题,并通过数值算例验证了所提出的方法可以有效避免大量的冗余信息。Shen等 [12] [13] 将事件触发机制与液压系统结合,提出了一种具有事件触发机制的自适应滑模控制方法,去除了大量的冗余数据。
电液伺服位置控制系统中多种非线性因素、参数缓变、外部干扰等因素使得控制精度的提高变得颇有难度。Yao等人 [14] 提出了一种自适应鲁棒控制器,实现了在一个控制器中同时处理参数不确定性和非线性。考虑参数不确定性和摩擦非线性问题,南京理工大学的姚建勇教授提出一种非线性控制技术,采用基于LuGre模型的摩擦补偿,并对其进行连续性修正得到了一种新的连续可微摩擦模型,接着设计了一种新型自适应控制器从而克服参数不确定性。
本文将考虑带宽受限下的液压控制系统精确控制,重点考虑实际工程中电液伺服系统存在不确定外干扰及未知速度信号,保证整体系统控制精度的同时减少通信使用量。提出一种基于事件触发机制和双扩展观测器的控制策略。利用事件触发机制删去数据传输过程中的冗余信号,提高通信带宽利用率。使用双扩展观测器得到系统中未知速度信号以及外干扰信号,并作为控制器设计的一环。基于反步法设计所提出控制器,并通过仿真验证所提出方法的有效性。
2. 阀控非对称缸数学模型
本文研究对象为阀控非对称缸,其原理图如图1所示。系统中的负载由活塞杆伸缩带动运动,通过液压缸两端安装压力传感器以获得实时压力信号,在惯性负载上安装位移传感器用于获取实时位移信号,并作为控制器设计参数。
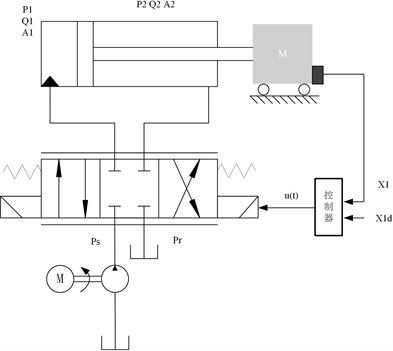
Figure 1. Schematic diagram of hydraulic valve-controlled asymmetric cylinder
图1. 液压阀控非对称缸原理图
根据系统数学模型及牛顿第二定律,系统的运动学方程为:
(1)
其中m为系统整机质量;y为活塞杆位移;
和
分别为液压缸无杆腔的有效面积和压力;
和
分别为液压缸有杆腔的有效面积和压力;b为粘性摩擦系数;
表示外干扰,包括工作过程中的非线性摩擦及外部干扰等。
在工作过程中,伺服阀与液压缸连接管路并不长,因此在建模过程中省略管路沿程损失与管道动态特性。得到液压缸流量压力动态方程如下:
(2)
式中:
为液压油的体积弹性模量,
和
分别为液压缸无杆腔和有杆腔的有效容积,
和
分别为液压缸无杆腔和有杆腔的初始容积,
为液压缸内泄漏系数,
和
分别为液压缸无杆腔和有杆腔外泄漏系数,
和
分别为液压缸无杆腔和有杆腔的流量,可以表示:
(3)
式中:
,
为控制输入电压
的总流量增益,
和
分别为伺服阀流量系数和阀芯面积梯度,
为阀芯位移,
为液压油密度,
为供油压力,
为油箱压力。
定义状态变量为
,通过推到得阀控缸系统三阶状态方程为:
(4)
式中
,
,其中
是建模误差,
,
,
,
,
,
,
,
。
3. 具有事件触发和双层扩张观测器的控制器设计
在设计控制器前,作出以下几个基于实际情况的假设。
假设1:期望轨迹
及其三阶导数都是有界;液压缸左右两腔的压力
和
是被
和
约束的,即
,
。
假设2:未知外干扰
及建模误差的匹配干扰
及其导数都是有界的,即:
(5)
式中
、
、
、
都是正常数。
3.1. 通信约束事件触发策略
在网络控制领域与水声通信领域中,采用时间触发的方式可能会因带宽受限而引起数据传输损失,从而造成控制性能下降。事件触发机制是指在特定条件满足时,系统或程序执行特定的操作或响应的机制。
使用事件触发机制结合预定性能控制对于电液伺服系统的控制是大有可为的,因为可以减少数据占用量,大大节省控制器更新的计算成本并保证系统性能。
本文使用一种创新的混合性事件触发机制,通过调整不同的触发条件参数,设计不同的触发条件,当所选状态满足触发条件时,控制输入
更新,该时刻
被称为触发时刻;在不满足触发条件时,控制输入在零阶保持器的作用下保留最近的一次触发时刻控制输入,即:
(6)
针对周期触发策略,将误差定义为:
(7)
将触发机制设计为:
(8)
如式(8)触发机制所示,通过调整
和
来达到不同的事件触发效果。若
且
,则为固定阈值事件触发;若
且
,则为相对阈值事件触发;若
且
,则为混合事件触发。
和
越大,因事件触发器而被省略的数据则越多。
3.2. 双层扩张观测器设计
电液伺服控制系统中,采用扩张观测器(ESO)来应对非线性干扰和建模误差,是一种高效的方法。ESO的主要优势在于其能够实时估计并补偿系统内的未知动态,从而增强系统的鲁棒性。这种设计原理通过将系统状态与未知动态一并考虑,实现了对复杂干扰的有效估计。
本文通过使用一种双层的扩张观测器,通过分开处理前两阶和第三阶,观测器能更有效地适应系统的非线性特性和模型误差,从而提高扰动估计的准确性和系统的整体鲁棒性。这种分离设计在复杂控制系统中具有显著的效果优势。
根据系统模型,定义非线性外干扰与未建模误差为
,构造双层观测器如式(9)所示:
(9)
其中
为所设计的双层扩张观测器带宽,结合系统模型式(4)可得观测器误差为:
(10)
定义误差向量
则观测器误差向量可重新表示为:
(11)
其中
。
由于
和
是Hurwitz矩阵,则必存在正定矩阵
满足
。
3.3. 控制器设计
在阀控非对称缸的位置跟踪控制系统设计中,本文融合了事件触发机制、双层扩张观测器。这种集成方法旨在优化资源使用,通过动态调整和实时扰动估计,确保高效和稳定的系统性能。
定义位置跟踪误差:
(12)
则其对时间的导数为:
(13)
设状态误差为:
(14)
结合式(4)设计虚拟控制律
为:
(15)
1) 第一步:设Lyapunov函数
为
(16)
对其求导得:
(17)
其中
代表所设定的控制器增益系数。
2) 第二步:设Lyapunov函数
为:
(18)
则其导数为:
(19)
则虚拟控制律
被设计为:
(20)
其中
,为所设计的控制器增益系数。
此时
为:
(21)
3) 第三步:设Lyapunov函数
为:
(22)
对其求导得:
(23)
则控制输入
被设计为:
(24)
式中
为可计算部分,
为不可计算部分,
。
(25)
由式(23)至(25)可得:
(26)
由杨氏不等式可得:
(27)
定义Lyapunov函数:
(28)
结合式(11),又由于
得
的导数
为:
(29)
根据式(5)设
基于上述过程可得:
(30)
运用非线性系统稳定性判断与有界性比较定理可得:
(31)
由上式可分析出,所设计的控制器在阀控缸闭环控制系统中将收敛至包含平衡点或原点小领域内,可以保证系统的稳定性。
4. 仿真验证
4.1. 仿真介绍
为了验证所设计的基于事件触发的控制器的控制效果,本节通过对比结合事件触发的PID控制器与基于扩展观测器反步控制器(ESOFC)的控制效果,通过MATLAB/Simulink平台搭建系统数学模型并在所选定的极限工况下仿真验证,从节省通信资源与全局跟踪效果评估本文控制器的优越性。系统仿真参数如表1所示。

Table 1. System simulation parameters
表1. 系统仿真参数
以上所选用的控制器参数选定为:
ETC + ESOs:此算法为本文所提出的基于事件触发和扩张观测器的控制器,使用双层扩张观测器估计系统中的速度状态量
,未知干扰
与非线性建模误差
,并通过事件触发机制减少控制输入
的数据量,为了保证一定的控制性能,选定参数为
。
ESOFC:此算法为基于扩张观测器的反步控制器,通过使用简单扩张观测观测系统速度状态量
与未知干扰
,针对系统中存在的非线性建模误差
无法处理;在时间触发机制下观察控制输入
的数据量,并与本文事件触发机制的效果进行对比。其参数选择与本文控制器参数相同。
ETPID:此算法为结合事件触发机制的PID控制器,针对系统中存在的非线性误差与未知干扰不做处理,仅通过使用位移状态反馈作为PID控制器的输入,并在其基础上使用事件触发机制提高带宽利用率,用于与PID对比体现事件触发机制的效果和作用。选用参数为:
。
PID:经典PID控制器,针对系统中存在的未知干扰与非线性误差不做处理,并通过时间触发的方式与ETPID对比事件触发机制的效果。选定参数与ETPID相同。
4.2. 仿真结果比较
将上述四种算法的控制性能进行对比,分别为:具有事件触发机制的PID算法(ETPID),PID算法(PID),具有扩展状态观测器的反步控制算法(ESOFC);具有事件触发机制和双层扩展状态观测器的控制算法(ESETC)。本章仿真分选择了理想跟踪信号为:
。
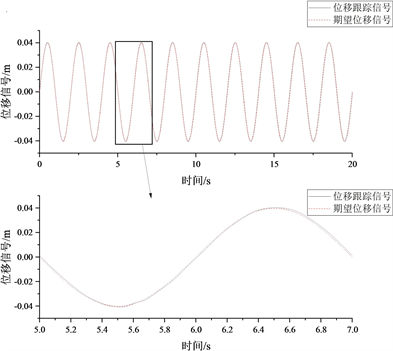
Figure 2. Position tracking effect of the algorithm in this paper
图2. 本文算法位置跟踪效果图
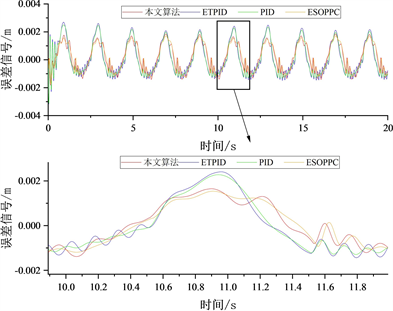
Figure 3. Comparison of tracking errors for four different algorithms
图3. 四种不同算法的跟踪误差对比图
如图2所示,在网络化控制工况下,ESETC控制下的跟踪信号能够很好地跟踪理想轨迹。图3为所选择的四种控制算法的误差对比,可以看到ESETC控制效果优于有事件触发策略的ETPID和无事件触发策略的PID控制器
Table 2. Comparison of metrics for four algorithms
表2. 四种算法的指标对比

Figure 4. Trigger moments and trigger intervals for Event Triggering Mechanism
图4. 事件触发策略的触发瞬间和触发时间间隔
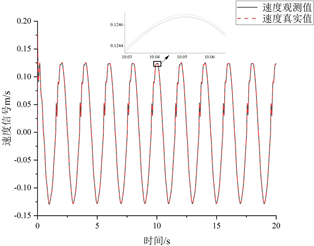
Figure 5. Hydraulic rod speed estimation curve
图5. 液压杆速度估计曲线

Figure 6. External interference signal tracking curve
图6. 外干扰信号跟踪曲线图
通过结果分析,本文算法对比没有事件触发策略的ESOFC效果十分接近,通过图4的事件触发器的触发效果可以说明本文控制器在略去大量冗余信号的同时,仍然能够保证很好的信号追踪效果。图5为使用双层观测器下,针对系统无法检测速度时对系统真实速度值的估计效果,体现了本文所使用观测器的有效性。图6为针对系统存在的外干扰的估计曲线,可见对外干扰估计有很好效果,有助于提高控制器的整体控制性能。根据表2,本文所提控制器触发率约有39.6%,结合事件触发机制的PID控制触发率为6.1%。由此可以得出,本文所提算法大大提高了通信带宽利用率,并保证了闭环系统良好的控制性能。
5. 结论
本文研究了在网络控制及带宽受限下的电液伺服系统位置跟踪问题,提出了一种基于事件触发机制的控制策略。通过仿真数据分析,可得以下结论。
本文控制器中事件触发机制的加入,通过与基于时间触发机制的控制输入以及控制效果对比,在保证控制性能的基础上删去大量冗余信号,有效提高了带宽利用率。
针对系统中无活塞杆速度检测信号以及具有未知外干扰的情况下,设计了一种双层观测器用于观测系统中未知的速度信号,外干扰信号以及非线性建模误差,大大提高了控制器的整体性能。
通过Lyapunov稳定性判据分析了本文控制器下系统的全局稳定性,结果表明本文控制策略保证系统在具有不确定性干扰情况下的稳定性。