1. 引言
六自由度并联运动平台是以并联机器人为主体设计的运动装置,与串联机构相比,并联机构具有刚度大、承载能力强、运动精度高等优点 [1] [2] 。六自由度并联运动平台通过三个电机实现六维运动模拟,具有高刚度、大负载能力和无累积误差等特点,广泛用于飞行模拟器、工业机器人和航空航天等领域,能够为产品研发提供可靠的测量数据 [3] [4] [5] 。
国内外众多研究人员和机构都对并联机构开展了大量研究,涉及其空间机构学、运动学、动力以及仿真实现等多个方面,并涌现出了各种不同的结构形式。美国海军航空工程Lakehurst研究所通过分析并联运动平台在潮汐下的姿态,成功研发了一款基于六自由度运动平台的船舶模拟器,可用于模拟舰船在海上航行时的横滚、俯仰和偏航等情况 [6] 。黄海涛 [7] 等人通过研究并联平台参数设置和运动可达空间的影响规律,确定了并联平台结构设计和参数优化方向,设计的并联平台具有较高的刚度和控制精度。张浩栋 [8] 对并联运动平台进行了深入的动力学特性综合仿真分析,基于仿真结果设计的三自由度平面精密定位平台能够有效满足智能装备中并联机构在高速、高加速度条件下的应用需求,为操作设备提供了高度灵活的运动控制能力。然而,传统并联运动平台由于机构本身限制,同时满足调姿范围及准确定位较为困难,因而无法进一步扩展其应用。
本文设计了以电机为驱动装置的六自由并联运动平台,能够在保证并联运动平台稳定性的同时,解决了工作时不便调节和工作精度不高的问题。通过机构拓扑学和逆运动学算法理论,验证了模型的自由度正确性并证明了平台能够按照预定轨迹进行空间6个自由度的运动。最后通过有限元分析,研究了并联运动平台在不同频率下的振型,为后期的样机加工和进一步改进设计提供了理论依据。
2. 并联运动平台的主体设计
2.1. 平台结构的设计
六自由度并联运动平台的结构示意如图1所示,整体由并联运动平台装置、万向旋转支撑杆和电机底座组成,其中中间层由三个伸缩杆通过铰链首尾连接,负责上活动平台的定位与角度调整。运动平台的位移是由下方三个电机驱动,电机主轴与电机固定套管末端固定,通过控制电机固定套管的位移长度和旋转角度,带动电机固定套管在一定范围内完成平移和旋转运动。
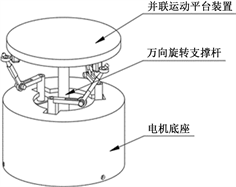
Figure 1. 6-dof parallel motion platform model
图1. 六自由度并联运动平台模型
根据设计功能需求对六自由度运动平台的基本参数进行设计,基本参数的数值见表1所示,可以实现上活动平台沿X轴、Y轴和Z轴三个坐标轴的线性位移和转动,可以达到可控、精准和高效等效果,具有系统稳定性高、可实现一定范围内的角度调节和空间位移等优势。

Table 1. Range of motion parameters of moving platform
表1. 运动平台活动范围参数
2.2. 机构自由度的计算
运动平台自由度是指机构在具有确定运动时,所包含的独立运动参数的个数,自由度计算是结构分析里的一个重要内容 [9] 。根据机构拓扑学内容可知,假设所有结构都是通过运动副相互连接而成,第一个约束用
假设,约束
可以为1到5之内的数字。假设n个物体之间的运动对的数目是g,机构的自由度数量则为所有运动自由度的数量减去所有约束的数量 [10] ,即:
(1)
通常情况下,式中的
可以用(6 − fi)代之,可推导出Kutzbach-Grubler公式,机构拓扑学中空间机构的自由度计算公式如下:
(2)
式(2)中:M表示自由度;n表示总的机构件数;g表示运动副数;
为第i个运动副的相对自由度数。
如图2可知,六自由度并联运动平台总构件数为9,运动副数为11。其中运动副1~3为圆柱副,其自由度皆为2,运动副4~6为转动副,其自由度皆为1,运动副7~9为球副,其自由度皆为3。
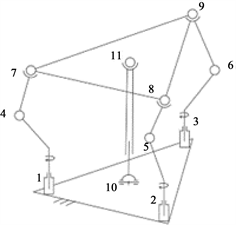
Figure 2. Schematic diagram of 6-dof parallel motion platform
图2. 六自由度并联运动平台机构简图
由于中间杆仅起支承作用,故计算时应除去万向节副10和球副11,剩余总构件数n = 8,运动副数
,代入式(2)可得:
通过Kutzbach-Grubler公式计算出机构自由度数目为6,包括沿坐标系三个方向的移动和转动,符合并联运动平台的六自由度要求,自由度假设成立。
3. 仿真实验与结果分析
3.1. 运动平台位姿求解
运动平台位姿求解通常采用运动学中的逆运动学算法,通过已知上活动平台的运动轨迹来求解各电机主轴的位移参数 [11] [12] 。当需要获取各伸缩杆的实时长度时,只需将运动平台各铰接点坐标转换到相同的坐标系,然后计算两点之间的距离,其中动坐标系相对于参考坐标系的位置和姿态可以通过有限次数的平移和旋转变换来实现。
当平台绕x,y,z轴的旋转角度分别为α,β,γ,坐标系的旋转矩阵R为:
(3)
式(3)中:
,
,其余以此类推。
假设运动平台球绞中心在动坐标系
中坐标为
,运动平台球绞中心在固定坐标系
中坐标为
,可通过左乘齐次坐标变换矩阵R,将该点的位置向量转换到另一个坐标系中,平移后的齐次坐标为:
(4)
各伸缩杆的长度矢量
在固定坐标系
可由
的实际长度解得:
(5)
由此当并联运动平台的参数给定后,可根据运动平台上任意点的期望轨迹,计算出各伸缩杆的位移。
3.2. MATLAB运动学仿真计算
在MATLAB中进行编程计算时,考虑计算误差
。升缩杆伸长范围不超过80 mm,X轴和Y轴方向球绞的转动范围分别为
和
,Z轴方向球绞的转动范围为
。当输入表2中的运动平台位姿参数后,通过逆运动学算法,可得到反解的各伸缩杆位移参数,如表3所示。
Table 3. Inverse solution of telescopic rod length
表3. 伸缩杆长度反解
通过比较输入位姿和反解结果,在三种不同的位姿情况下,伸缩杆L1、L2和L3的长度的计算结果较为准确,表明该方法对于不同位姿的运动平台均能预测其相应的伸缩杆长度。
3.3. ANSYS有限元仿真
动力学分析是通过将结构划分成许多小的有限元素,然后对每个元素进行建模,可以更精确地模拟结构的振动响应,用来分析物体在随时间变化的载荷作用下自身的运动规律和响应行为 [13] [14] 。结构在动力作用下的运动微分方程组为:
(6)
式(6)中:M、C和K分别代表为系统的质量矩阵、阻尼矩阵以及刚度矩阵;
、
和
则分别代表为系统在t时刻的加速度向量、速度向量以及位移向量;
为外部的载荷向量。
在模态分析中,为了获得系统固有振动的特性,通常会忽略阻尼矩阵项并且假设
。这种情况下,结构的运动微分方程组可以表示为:
(7)
该运动微分方程组有非零解的充要条件为:
(8)
式(8)中:
为系统第i阶的固有频率,
为系统第i阶的振型。
在模态仿真分析中,结构的前几个自振频率和振型对其整体的动态行为起着主导和控制作用。对于并联运动平台,需要求结构的前两个自振频率和振型,仿真结果如下图3所示。此外,通过结果还可以观察到振型的变化对结构整体动态行为的影响。
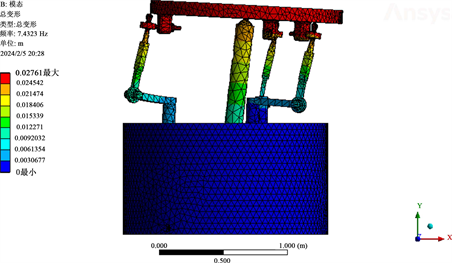 (a) 一阶振型
(a) 一阶振型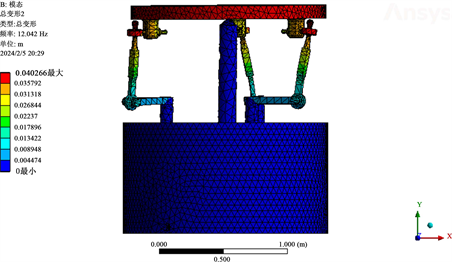 (b) 二阶振型
(b) 二阶振型
Figure 3. Vibration diagram of 6-dof parallel motion platform
图3. 六自由度并联运动平台振型图
由于存在六个自由度的运动,机构的振型主要涉及平移方向上的振动、旋转角度的振动或这两者的组合。通过分析一阶和二阶的模态振型,六自由度并联运动平台的变形表现大致相同,但中间的万向旋转支撑杆和周边三根伸缩杆扭动方向不同,扭动幅度也有不同程度的提升。如表4所示,一阶模态时万向旋转支撑杆的相对位移变形较大,局部振型比较明显,最大值为27.6 mm。二阶模态时模型则呈现了弯曲和扭转结合的变形特征,其中绕Y轴水平面扭转为主要表现,最大值为40.4 mm。
通过对六自由度并联运动平台进行模态分析,特别是对振动模态、固有频率和振型的结果研究后,在有限元仿真中,模型的两个模态分别展现了偏仰振动和回转振动,其固有频率分别为7.44 Hz和12.06 Hz,验证了结构设计的合理性和稳定性。
Table 4. Natural frequency and mode shape characteristics
表4. 固有频率和振型特征
4. 结论与展望
本文对一种新型六自由度并联运动平台进行了设计和分析,通过三个电机控制伸缩杆,所设计的并联运动平台能够实现三维空间内的滚转、俯仰、偏航和平移运动。相对于传统运动平台,这一设计克服了缺乏灵活性和位置调整困难的问题,具备紧凑结构、强负载能力和低运动惯量等优势。利用SolidWorks软件建立了三维模型和装配,并通过Kutzbach-Grubler公式验证了设计的六自由度。在MATLAB中进行逆运动学仿真,能够快速得到平台在任意给定运动下各伸缩杆的输入位移参数。仿真结果显示,该平台能够按照预定轨迹进行六个自由度的运动。最后,通过ANSYS Workbench软件进行了仿真模型和动力学分析,成功验证了设计的结构稳定性和安全性。这一研究能够为新型运动平台的设计提供有力的理论和实验基础。