1. 引言
公路是经济发展的动脉和助推器,道路路网作为交通基础设施的重要组成部分,其数据的准确性和全面性直接关系到民计民生,在交通管理、城市规划、精准扶贫以及大众出行等方面具有重要意义和价值。传统的路网核查多采用人工进行实地调查的方式,比如使用手持全球导航卫星系统测量工具进行道路轨迹数据收集等。随着各地农村公路建设的大范围开展,该方法已远远满足不了快速准确监管的需要,也在一定程度上影响了数据使用者的分析、决策以及数据更新。
为了解决这一问题,迫切需要对路网信息进行周期性全面、准确的掌握,实现“全自动排查 + 疑似人工复核”的方式提升路网核查效率,并提出定量化参考评价指标,消除不同作业人员评判标准不一致导致的核查结果差异。高速发展的浮动车时空轨迹结合高分辨率的遥感技术是一种方便的解决方案,为公路规划、管理和建设核查提供了新技术和新方法 [1] [2] [3]。浮动车是一种安装全球定位设备并且通过无线通讯设备将该测量车信息发送出的测量车辆,浮动车检测系统能及时准确的反映车辆坐标、速度和采样频率从而间接分析行驶道路的交通状况,是全面、高效获取道路信息的重要途径。利用浮动车时空轨迹获取路网数据具有成本低廉,且进行连续不间断获取,时空覆盖面广 [4]。因此,浮动车轨迹数据也被广泛的应用于路网提取 [5] [6] [7] [8]。
本文是通过路网之间自动匹配技术实现路网变化检测。具体是:通过设计和改进多种相似性特征描述指标,并通过权重组织这些特征指标作为匹配与否的衡量标准;然后再根据这些匹配关系实现变化与否的判断。其优势主要在于① 传统通过人工从遥感影像中直接进行人工核对,人工判断上报路网信息与遥感影像数据中的差异,因此需要大量的人力物力去进行核查,而本文提出的“自动 + 人工辅助”方式进行路网核查,能够有效的节省人力物力,提高路网核查效率;② 从技术上看,本文提出采用匹配技术实现路网变化检测方法,从匹配原理进行阐述,提出多特征路网匹配算法,丰富了匹配技术的理论基础和应用场景,为多源数据的匹配与融合提供重要的技术保障。
2. 相似性特征设计与表达
a) 基于面积累积的形状差
基于面积累加的形状差(Accumulation Area of the Shape Difference, AASD)的基本思路是通过两条线之间形成闭合区域的面积累加大小来比较两者形状差异。结合图1所示,其基本思想:首先取较短线对象(
)向较长对象(
)平移,使
和
的首结点
和
重合(图1(a)至图1(b)的过程),以
首结点
为起点,在
上取等长于
的点
,将
的尾结点 与
与 中的
连接形成封闭区域(如图1中阴影区域
、
);然后对该区域进行面积累积计算,对于存在多个封闭区域时不易计算的问题,采用二元积分求解面积累积值。
中的
连接形成封闭区域(如图1中阴影区域
、
);然后对该区域进行面积累积计算,对于存在多个封闭区域时不易计算的问题,采用二元积分求解面积累积值。
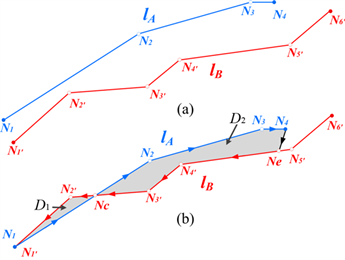
Figure 1. Schematic diagram of shape difference between road pairs to be matched
图1. 道路待匹配对之间的形状差示意图
与
基于面积累积的形状差即为封闭区域的多边形面积积分,如下:
 (1)
(1)
其中
表示封闭区域 、
,
表示对
进行二元积分。只需要确保每一线对象及其子对象具有统一的方向走势,且不同线对象走势应相反以形成封闭区域即可,可解除对线方向的约束,加强对整体差异的描述。如图1所示的方向,设以逆时针方向的积分结果为正,则封闭区域
、
的积分结果分别为正和负,两值求和起到一定的抵消作用,与道路形状差异描述中关注整体的描述原则契合。上式中直接进行面积积分计算过于复杂,本文引入格林公式将函数的面积分转换为沿封闭区域边界线积分从而降低计算难度。多封闭区域格林公式如下。
、
,
表示对
进行二元积分。只需要确保每一线对象及其子对象具有统一的方向走势,且不同线对象走势应相反以形成封闭区域即可,可解除对线方向的约束,加强对整体差异的描述。如图1所示的方向,设以逆时针方向的积分结果为正,则封闭区域
、
的积分结果分别为正和负,两值求和起到一定的抵消作用,与道路形状差异描述中关注整体的描述原则契合。上式中直接进行面积积分计算过于复杂,本文引入格林公式将函数的面积分转换为沿封闭区域边界线积分从而降低计算难度。多封闭区域格林公式如下。
格林公式:设封闭区域D由分段光滑的曲线L围成,函数
及在多边形D上具有一阶连续偏导数,则有:
(2)
式中L是D的取正向(即逆时针方向)的边界曲线,由于存在多个多边形共同组成闭合区域的情况,式(3)可转化为:
 (3)
(3)
式中n为组成闭合区域D的线段数量,
为组成闭合区域的第i条线段。其直线方程有:
(4)
其中,
表示第i条组成线段
的斜率,设式(4)中
;
,将二元积分转化为单元积分。将
;
和式(5)带入到式(4)中,可得:
(5)
结合式(2)可以得出待匹配对道路之间闭合区域
、
面积累加计算公式为:
(6)
其中
为
线段的i坐标。
通过上式可得到待匹配道路对
与
之间的基于面积累加的形状差,可度量两者在形状上的差异。
b) 长度相似性特征
对轨迹路网对象与基础路网对象进行长度比较时,长度差异特征是一种较容易被理解和实现的相似性度量方法 [9]。一种经常用的线实体
与
的长度相似性度量计算方法为:
(7)
其中
表示线实体
的长度
表示线实体
与
之间的长度相似程度。
一般来说,长度相似特征不能独立用于线实体之间相似性度量,一般需要通过与其他相似性特征组合使用,在同尺度匹配中,其具有一定的衡量待匹配对之间长度差异的能力,而在不同尺度匹配中,由于受匹配类型
的影响,度量能力适用范围有一定的局限性。
c) 拓扑相似性特征
拓扑相似性是指通过将空间对象
与其邻接对象之间的拓扑关系同空间对象
与其邻接对象之间的拓扑关系进行比较、分析其共同特性。可从定量方面的加以定义。
从定量方面来看,安晓亚等对提出通过拓扑相似值来区分拓扑相似程度 [10]。结点度(价)的定义如表1所示,设点对象
结点的度(价)为
,与其对应的点对象
的结点的度为
,则有结点
与
的拓扑相似值计算公式为:
(8)
式中可看出,当
时,
。而当
与
的差值越大,那么拓扑相似性越小。
当采用该方法度量拓扑相似度时,可能存在如图2所示的3种情况,结点的度相同但对象之间明显不匹配。因此,通过结点度来度量拓扑相似程度是一种较为粗糙的拓扑相似性度量方法。
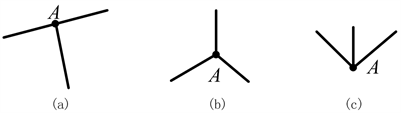
Figure 2. The degree of node A is 3, but it cannot be regarded as matching
图2. 结点A的度均为3但不能视为匹配的情况
拓扑相似性特征针对轨迹路网与基础路网地图匹配的描述有一定的描述作用,尤其是长度和方向等相似性特征指标相似的情况下,其能够发挥较好的度量作用。
3. 变化检测
路网变化检测实际上是体现一定时间内路网的变化程度,而表现出的是道路数据空间和属性变化。如表2所示道路实体基本变化形式。

Table 2. Basic change form of road object
表2. 道路对象基本变化形式
变化检测的核心部分是采用匹配技术完成。选取合适的路网匹配方法,可以获取路网数据之间的映射关系,对具有映射关系的匹配对进行进一步分析,可实现轨迹提取路网与基础路网之间变化检测。实现过程如图3所示,具体步骤如下:
通过缓冲区分析获取数据B中的一个道路实体EB1,检测数据A候选匹配集中是否存在与EB1匹配的实体,若没有与EB1匹配的对象,那么可以判定发生了变化,且变化类型为删除,EB1为删除实体,将EB1转入到删除数据集;
若存在唯一实体EA1与EB1对应,此时并不能断定是否发生了变化,需要通过其他辅助操作,判断EA1与EB1的变化是否大于变化阈值,进一步确定是否发生真变化,若两者之间的变化大于变化阈值,则判定EB1发生变化,将EB1转入到改变数据集;反之,判定EB1未发生变化,将EB1转入到未改变数据集。
若存在多个实体与EB1匹配,同步骤(2)中的判断是否发生变化的思路,对这多个匹配实体进行判断变化并转入相应的数据集;
判断数据B中的检测过程是否完成,若未完成,则跳转至步骤(1);反之则判定数据A中无匹配对象的实体为新增路网对象,将这些对象转入到新增数据集中。
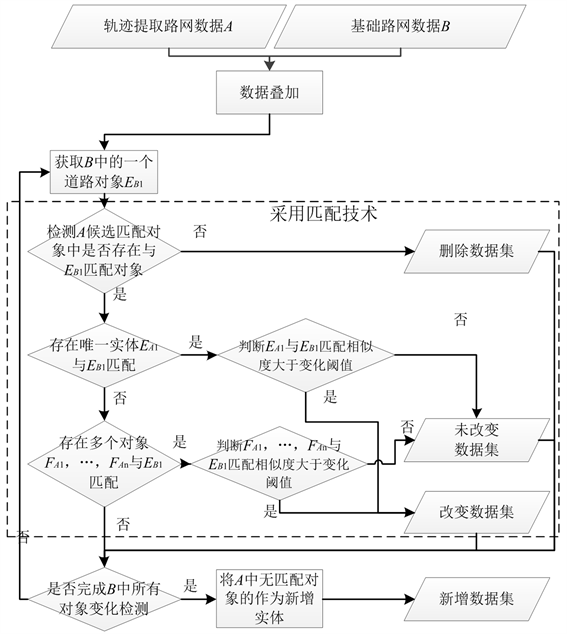
Figure 3. Road network change detection flow chart
图3. 路网变化检测流程图
4. 实验分析
首先选取实验区域,筛选已有实验数据在该区域的坐标点,并且排除无关性较大的点。结果如图4所示。
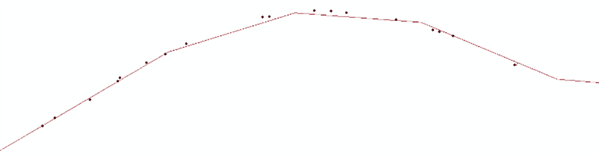
Figure 4. Coordinate point of experimental area
图4. 实验区域坐标点
对该区域点进行连线生成缓冲区后,提取道路中心线即为所求轨迹提取路网。如图5所示。
分别从长度、面积、方向三个指标将该轨迹提取路网与道路路网进行匹配。
1) 长度
分别测量轨迹提取路网和对应段路网长度,其数据如表3所示。
从表中可以看出二者长度相似度为0.996,符合相似标准。
2) 面积
在轨迹提取路网端点向道路路网作垂线,连接两条路网,将两条线对象形成的闭合区域的面积累积大小来度量二者形状差异。生成面积如图6所示:
面积差如表4所示:
经多次实验可知,面积差在匹配范围内。
3) 方向
将两条线对象根据其起始点确定方向,从图7中可以看出二者方向相似。
通过长度、面积和方向三个要素进行匹配实验可以得出该轨迹提取路网与道路路网相匹配的结果。利用该方法可以对其他的轨迹提取进行匹配筛选,从而确定路网变化。
5. 小结
本文从路网的形状、长度、方向和拓扑多个方面设计和改进多种矢量路网之间相似性特征指标,并依据这些,根据一定权重的相似性特征构建路网匹配算法。从而实现浮动车时空轨迹数据源路网和基础道路数据精确匹配,并根据两者之间匹配对应关系进行路网核查业务中变化区域的检测,实验结果表明,本文提出的匹配算法能够有效区分伪变化,发现路网之间的真变化,能够有效减轻人工路网核查的工作量,为路网核查工作的自动化提供有力的技术支撑。
基金项目
国家重点研发计划项目(2017YFC0822003, 2017YFC1405004, 2017YFB0503802);国家自然科学基金资助(91646207);资源与环境信息系统国家重点实验室开放基金资助。
NOTES
*通讯作者。