1. 引言
重载铁路需要承受反复的大轴重列车荷载的作用,随着车辆运行速度、货运量、运行密度不断增大,轮轨相互作用不断加剧,轨道的使用寿命将不断减少直至破坏。近些年来对车辆–轨道耦合动力学模型的分析研究成果十分突出,相对应的也建立了许多不同的模型。陈元昌 [1] 探究了基于模型缩减法建立了高速铁路车辆–轨道耦合动力学系统模型,以实现提高其求解动力响应的速率的可行性。赵金顺,万传风等人 [2] 建立过直流电机车辆的车辆–轨道耦合动力学模型,仿真计算了广州地铁4号线的工程线路参数,并且给出了仿真计算结果的参考值。翟婉明院士 [3] 第一次将车辆和轨道作为一个庞大的总体系统来研究,并且最先建立了车辆–轨道垂向统一模型,提出了车辆–轨道耦合动力学系统理论。本论文参考前人的研究成果,对相同的车辆、轨道、道床以及相同的高低不平顺激励进行了两种不同车辆模型的仿真计算,依据可靠度设计标准比较了两个模型的垂向轮轨力计算结果。
2. 车辆–轨道耦合系统动力学模型
在建立车辆–轨道耦合动力学模型的过程中,将车辆简化为车体、构架和轮对三大模块,将轨道结构简化为钢轨、轨枕、道床,路基简化为弹簧 [4]。根据本文的研究需要选择C80货车模型为研究对象,考虑了车体沉浮和点头运动、两个转向架的沉浮和点头运动以及4个轮对的沉浮运动共计10个自由度 [4]。货车建模过程中,需要考虑将转向架和轮对的一系连接,车体和转向架的二系连接全部转化为弹簧阻尼单元,因此,车体和转向架是通过两组弹簧阻尼单元连接,每一组转向架又通过两组弹簧阻尼单元分别连接。
图1为车辆–轨道垂向耦合动力学模型,通过对车体各个部件之间的连接状况及受力分析,利用牛顿第二定律建立了车体的运动方程。车辆刚度矩阵[KF]、质量矩阵[MF]、阻尼矩阵[CF]和轨道的荷载向量{PF},假设车辆的位移向量为[XF],那么车辆系统的运动方程为:
(1)
车辆移动荷载作用于钢轨上,钢轨为车辆提供支撑力,两者之间的振动响应为整个系统的原动力。车辆系统和轨道系统建立完成以后还需要建立两者之间的耦合连接模型。本论文参照文献 [5] 采用Hertz 接触理论分析了轮轨之间的相互作用力。具体计算如下:
轮轨垂向作用力为:
(2)
式中,
——轮轨接触常数(m/N2/3);
——轮轨间的弹性压缩量(m)。
轮轨间的弹性压缩量:
(3)
式中,
——t时刻第j位车轮的位移(m);
——t时刻第j位车轮下钢轨的位移(m)。
当
< 0时,表明列车脱轨,此时轮轨力为零。
轮轨力表达式为:
(4)
通过研究可以看出垂向模型相对比较简单,车辆子系统和轨道子系统中的连接大多数由弹簧阻尼单元构成,钢轨简化为平面的梁单元模型,车轮和钢轨之间的接触简化为赫兹非线性接触模型,所以垂向模型的数值仿真计算可以由Matlab编程计算完成。
3. 车辆–轨道空间耦合系统动力学模型结构的建立
仅仅在车辆–轨道垂向系统模型中考虑和模拟车轨之间的耦合作用是不够完善和准确的。空间模型考虑了轮轨接触关系和轮轨蠕滑力,并且进一步考虑了系统的横向运动和轨距不平顺对动力特性的影响。利用UM软件建立C80货车的车辆–轨道空间耦合系统动力学模型,本论文建模所运用的车辆参数见参考文献 [6]。车辆–轨道空间模型建立时将转向架分为侧架、摇枕、斜楔等部件,C80货车使用的是K5或K6转向架模型。本论文建模时将车辆简化为一个车体、两个摇枕、四个侧架、四对轮对共计11个刚体。如图2和图3分别为UM建模的K6转向架模型图和C80货车模型图。本论文轨道为有砟轨道,在有砟轨道建模时,左右两股钢轨都可以视为连续弹性离散点支承基础上的无限Timoshenko梁,该轨道模型具有垂向、横向、及扭转运动三个自由度。轨枕简化成刚体,同样具有垂向、横向振动及扭转运动三个自由度,在钢轨和轨枕以及轨枕和道床之间采用线性弹簧和线性阻尼连接,道床离散为刚性质量块 [7]。轨道的随机不平顺可以看做是车辆轨道实际工作状态的模拟,轨道随机不平顺将直接影响列车运行的安全性、平稳性和舒适性。本文参考大秦线路和重载铁路研究的成果,轨道不平顺采用美国的标准轨道五级谱,并利用三角级数法来模拟其不平顺曲线。

Figure 2. Front view (left) and rear view (right) of spatial coupling model
图2. 空间耦合模型正视图(左)和后视图(右)
4. 模型的对比分析
为了验证重载货车空间模型的可靠性以及Matlab编程的正确性,计算了当行车速度为60 km/h结合多段不平顺工况下的钢轨垂向位移,图3和图4分别为车辆–轨道垂向模型和空间模型仿真计算所得的钢轨位移曲线,由图可知,用垂向模型和空间模型计算所得的钢轨垂向位移基本一致,两种模型计算得到的钢轨垂向位移数量级相同,垂向钢轨最大位移都为1.7 mm,可以验证两种模型的可靠型和一致性,但是两种模型的计算结果还是具有差异。为了进一步验证两种模型计算结果的一致性,所以有必要对比分析计算轮轨力的结果。
5. 模型轮轨力的计算结果比较
5.1. 垂向模型计算结果分析
本文以C80重载货车模型行车速度为60 km/h结合多段不平顺为工况进行研究,轨道形式为60 kg/m 钢轨和有砟轨道。通过仿真模拟计算得到了大量的垂向轮轨力样本值,最小值为100.39 kN,最大值为161.55 kN。

Figure 3. Vertical model rail vertical displacement
图3. 垂向模型钢轨垂向位移

Figure 4. Vertical displacement of rail in spatial model
图4. 空间模型钢轨垂向位移
计算其样本均值得:
仿真结果与计算得到结果135.7 kN相符;标准差为:
变异系数为:
确定样本分组的最小数组:
,
故可以把样本划分为47个区间,每个区间间距为:1.40 kN。样本频数和频次分布如图5所示:
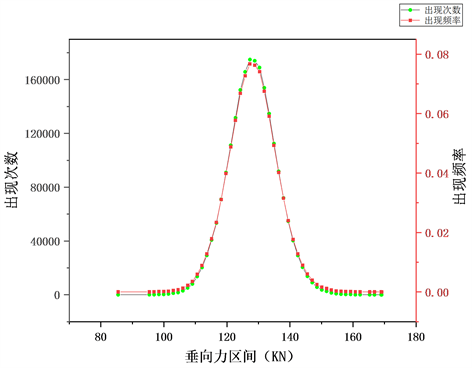
Figure 5. Frequency chart of vertical force samples
图5. 垂向力样本频数、频率图
5.2. 空间模型计算结果分析
采用上述内容介绍的算法,对空间模型在相同的工况下计算得到的2280536个垂向力数据进行分析,样本最小值为92.59 kN,最大值为169.18 kN,样本均值为131.94 kN,标准差为10.34 kN,变异系数为0.05。样本分组数为50组,每组间隔为1.6 kN,样本频数和频次分布如图6所示。

Figure 6. Frequency chart of vertical force samples
图6. 垂向力样本频数、频率图
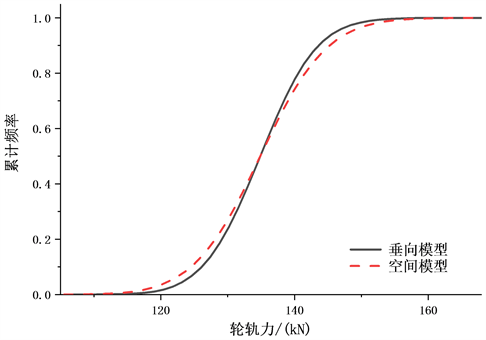
Figure 7. Sample cumulative frequency chart
图7. 样本累计频率图

Table 1. Statistical comparison of sample characteristics between vertical model and spatial model
表1. 垂向模型与空间模型计算样本特征统计对比
由图7和表1可以看出经过垂向模型和空间模型计算得到的结果非常相似且趋于重合。空间模型采用了比垂向模型更能够接近实际情况的轮轨接触模型,并且在仿真模拟的过程中使用了垂向和横向复合不平顺激励,所以两种模型计算得到的均值基本一样,但是空间模型计算得到的标准差以及变异系数较垂向模型的有所增大。方差由6.56 kN增加至10.3.4 kN,增大了57.7%;样本数据也向着两端延展,最大值变大,由161.55 kN增大至169.18 kN,增加了4.7%;最小值变小由100.39 kN减小至92.59 kN,减小了7.7%,数据分布越来越分散;但两者样本统计特征相差不大。
由正态分布特点可知,任意一随机轮轨垂向力小于
的概率为:84.13%,而小于
的概率为:99.87%。则由上述样本得出的动力系数表2。
Table 2. Comparison of dynamic coefficients
表2. 动力系数对比
从表2可以看出空间模型得出的动力系数同样大于垂向模型,垂向模型计算结果为155.58 kN,空间模型结算结果为167.52 kN;其三倍方差下疲劳荷载也更接近于样本最大值,但在一倍方差下其疲劳荷载相差不大。
5.3. 理论分析
从上述模拟结果来看,两种模型整体的计算结果都比较理想,但空间模型得出的结果比垂向模型得出的结果更加符合实际,从理论的角度来看,垂向模型主要考虑列车轮载对轨道产生的垂向力,数值模型考虑的是整个运行空间,两种数据模型得到的结果基本一致,充分可以证明垂向力是影响列车运行的和稳定性的主要因素。
从每一种模型的样本值可以看出,垂向力最大值与最小值附近出现的频次都很少,而样本均值附近垂向力出现的频次最高。从理论的角度来看,车辆–轨道是一个系统的弹簧模型,车辆在运行过程中,车轮、轨道均会出现不同程度和不同频次的震动,车轮对钢轨接触面上产生的压力也会随着震动频次的不同而发生变化。当车轮振动幅度达到最值时,车轮与轨道之间的接触面上分布会产生的最大和最小的垂向力;正常情况下,车–轨的震动幅度处于最值之间,出现的频次也最高,因此产生的垂向力也位于最值之间。
6. 结论
本论文通过比较垂向模型和空间模型。可以清晰地看出垂向模型和空间模型计算所得的钢轨垂向位移和轮轨力大体上是相同的,因此垂向模型和空间模型在解决车辆–轨道耦合动力学问题时具有相同的功能。两种模型得到仿真计算结果具有相似性。垂向模型和空间模型在计算结果的精确性上有一定的差别,空间模型相对于垂向模型而言仿真计算结果更加接近模拟的实际情况。垂向模型相对于空间模型计算中存在的差异主要是由于两种模型在建模时考虑的自由度数目不同。空间模型不仅考虑到了车体的沉浮和点头,还考虑到了车体横向位移、侧滚、摇头和旋转。
综上所述,在车辆–轨道耦合动力学模拟计算中,当计算结果的精度要求比较低时应该考虑用垂向模型来计算;当对于计算结果有较高的精度要求时应该考虑用空间模型来计算。