1. 前言
随着铁路车辆的运行速度不断提高,车辆设计轻量化等发展趋势下,使得车辆结构刚度降低,且运行条件逐渐严苛,故不能忽视轨道车辆关键结构因非线性变形导致的车辆系统振动所带来的影响 [1]。采用单一的刚体动力学建模方式来研究铁路车辆的动力学特性已经不能满足科研需要,有必要将柔性体动力学引入到多体动力学仿真计算中。郭训等 [2] 研究了柔性轮对车辆动力学的影响;吴少培等 [3] 探讨了构架柔性对车辆振动特性的影响;杨丹丹 [4] 基于SIMPACK的某型列车柔性车体刚柔耦合建模进行研究其对动力学性能的影响等,皆分析得出,和刚性模型对比,采用柔性体建模方式对列车的运行表现仿真结果存在一定影响,且更能表现列车真实的运行状态,所以有必要将列车关键结构建立为柔性体。考虑到单一结构柔性化不能反映真实的多柔性体耦合在现实场景中的表现 [5]。为了研究多柔体耦合车辆系统和多刚体车辆系统的整体差异,本文在已有的对单一柔性结构进行研究的理论基础之上,将柔性轮对、柔性构架、柔性车体共同组建一个多柔体动力学系统耦合模型,仿真分析刚柔耦合车辆模型和多刚体车辆模型在运行状态下,相关动力学指标的差异。
2. 车辆系统动力学相关指标
轨道车辆系统动力学性能的评价主要通过车辆在运行时的稳定性、平稳性和曲线通过性能等指标综合评估。
2.1. 车辆运行稳定性指标
车辆运行稳定性评价采用非线性临界速度方法,让车辆在时域中以一定速度通过一段有激励的线路,然后让车辆在撤消激励的光滑线路上继续运行,根据轮对横移量是否收敛来判断当前速度是否达到蛇形运动失稳时的临界速度 [6]。
2.2. 车辆运行平稳性指标
车辆在运行中会产生各种形式的振动,对于客运列车来讲,振动在一定程度上影响了旅客乘坐的舒适性。我国对铁路车辆运行平稳性评价分别按照车体振动加速度(av垂向振动加速度,al横向振动加速度)和Sperling平稳性指标来评定 [7],具体评价等级见表1。
其中Sperling平稳性指标的评价方法如下:
(1)
式中a为车体振动加速度(cm/s2),f为车体振动频率(Hz),
为与振动有关的修正系数,W则为评价指标。
垂向振动不同频率下的修正系数
取值:
(2)
横向振动不同频率下的修正系数
取值:
(3)

Table 1. Evaluation criteria for running stability of passenger cars
表1. 客车运行平稳性评价标准
2.3. 曲线通过性能
为了判断车辆过曲线线路运行时所产生脱轨现象的受力情况,并找出临界条件,目前我国主要采用脱轨系数和轮重减载率对车辆曲线通过性能进行评价 [8]。
2.3.1. 脱轨系数
根据我国95J01-M《高速试验列车客车强度及动力学性能规范》,对高速动车组的脱轨系数定义为 [9]:
(4)
式中Q1为作用于轮缘上的侧向力,P1为作用于车轮上的垂向力,μ1为轮缘与钢轨之间的摩擦系数,α1为轮缘角。
参考95J01-M中的脱轨系数安全范围为
。
2.3.2. 英文作脱轨系数
主要对于一侧车轮严重减载时所造成的脱轨现象进行评价,对轮重减载率的定义如下 [10]:
(5)
式中
为平均静轮重,∆P为轮重的减载量,P1,P2为轮缘与钢轨之间的摩擦系数。
根据95J01-M中采用的轮重减载率安全指标为 [11]:
。
3. 车辆系统动力学建模
3.1. 多刚体车辆模型建立
多刚体车辆的建立主要在SIMPACK软件中,建立轮对子结构,车轮踏面型号采用S1002型号;刚性转向架结构由摇枕、构架、前后轮对和轴箱组成,构架和轮对之间有一系轴箱弹簧、一系减振器和轴箱转臂,摇枕和构架之间建立了二系空气弹簧、抗蛇形减振器、二系横向减振器以及抗测滚扭杆结构;根据车辆的实际参数,构建车体结构,并将转向架子结构与车体之间通过虚摇枕进行装配,组建最终的多刚体车辆模型,如图1所示。
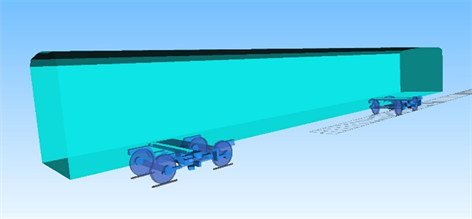
Figure 1. Schematic diagram of multi-rigid vehicle model
图1. 多刚体车辆模型示意图
3.2. 多刚体车辆柔性体模型建立
在SIMPACK软件中建立柔性体,需要作为SIMPACK和其他有限元软件之间的FEMBS接口程序进行转换。主要通过将有限元分析的物理模型特征等数据输入到运动方程,形成柔性体数据的标准输入数据文件格式(SID文件)。然后将SID文件通过FEMBS接口程序的FEM模块写入,并同时将柔性数据转化成SIMPACK可读格式。从而在SIMPACK软件中得到可使用的柔性体文件。
刚柔耦合模型的建立主要建立柔性轮对、柔性构架、柔性车体结构。文中的柔性结构建模流程为根据实际结构参数采用SolidWorks几何建模,HyperMesh有限单元网格划分,并通过有限元软件ANSYS进行有限元结构的子结构分析和模态计算,将生成.sub、.cdb、.tcms文件导入到SIMPACK软件的FEMBS接口生成柔性体文件。如图2所示为柔性体建模流程操作示意图。
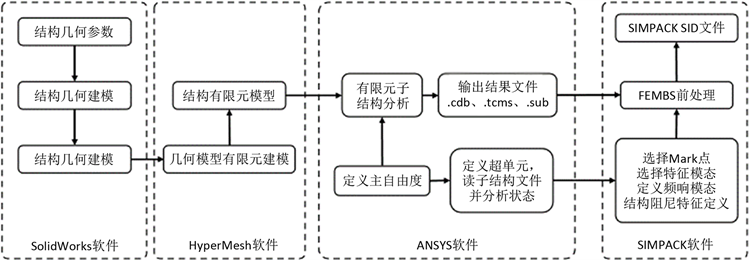
Figure 2. The flexible structure modeling process
图2. 柔性体结构建模流程
最后用生成的轮对、构架、车体的柔性体结构取代对应的刚性结构,组建刚柔耦合车辆模型,如图3所示。
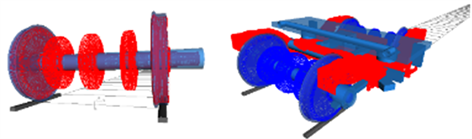 (a) 柔性轮对结构(红) (b) 柔性构架结构(红)
(a) 柔性轮对结构(红) (b) 柔性构架结构(红) (c) 杠头耦合车辆模型
(c) 杠头耦合车辆模型
Figure 3. Schematic diagram of rigid-flexible coupling vehicle model
图3. 刚柔耦合车辆模型示意图
为了保证所建立的车辆模型系统的平衡以及模型的可靠性,最后在建立完成的模型基础上进行Preload名义力计算,以确保车辆系统处于平衡稳定状态。
3.3. 轨道参数
本文所采用的轨道型号为UIC定义的60 kg/m型号钢轨,轨距为1435 mm,轨底坡为1:40。车轮型面为欧洲铁路标准型面S1002。所采用的轨道不平顺激励为京津线实测轨道谱。
临界速度指标计算采用的线路参数为直线,在30~1000 m处加入轨道不平顺激励,1000 m以后撤销激励。
在分析车辆其他动力学指标的差异时,设置分别加载京津线实测轨道激励谱的直线和曲线两种轨道类型。其中曲线轨道设置参数:缓和曲线长度为550 m,曲线长度为400 m,半径为6000 m,外轨超高为0.11 m。
4. 仿真流程
根据车辆系统动力学相关指标类型,将车辆的运行工况分为直线工况和曲线工况两种。为研究车辆在相同运行条件、不同速度下的运行状态,在直线运行条件下,仿真速度区间为160~360 km/h,每隔10 km/h为一个采样速度,共计21个计算工况。在曲线运行条件下,仿真速度区间为200~300 km/h,每隔20 km/h为一个采样速度,共计6个计算工况。将多刚体车辆模型和刚柔耦合车辆模型分别在上述工况进行仿真计算,根据计算结果进一步评价两种建模方式对动力学性能的影响。
5. 仿真计算结果分析
5.1. 临界速度
通过非线性临界速度仿真方法,多刚体车辆模型的临界速度计算结果为483 km/h,刚柔耦合车辆模型的临界速度结果为432 km/h,临界速度低于刚性模型约10.56%。如果采用多刚体模型代替刚柔耦合模型,则会使得车辆稳定性计算结果偏大,实际情况会有一定失稳风险。
5.2. 车辆运行平稳性指标差异
5.2.1. 车体加速度
在车体加速度方面整体上随着运行速度的增加,呈现增大趋势。刚柔耦合车辆模型的车体加速度在横向和垂向的值皆大于多刚体车辆模型。由于采用的车辆为高速动车组,且仿真速度皆在安全行驶速度范围内,所以在仿真的速度区间内,车体质心加速度表现等级为优。
在直线运行条件下,横向车体质心加速度,如图4,在运行速度增加的条件下,两者的差距逐渐缩小。差距最大时在运行速度为160 km/h,刚柔耦合车辆模型比多刚体车辆模型车体横向加速度大0.12 m/s2。垂向车体质心加速度结果显示,如图5,在运行速度增加的情况下,两者的差距在逐渐增大。差距最大时的运行速度为350 km/h,刚柔耦合模型比多刚体模型车体垂向加速度大0.124 m/s2。
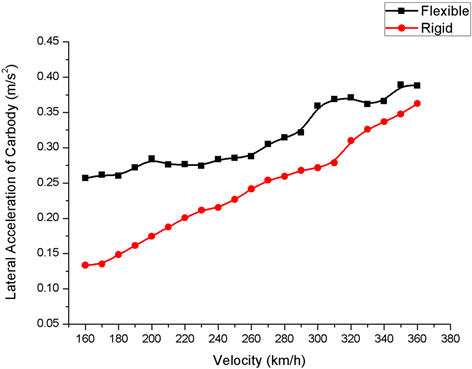
Figure 4. Lateral acceleration of car body under straight running conditions
图4. 直线运行条件下车体横向加速度
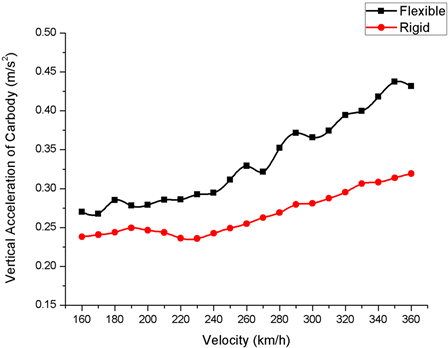
Figure 5. Vertical acceleration of car body under straight-line running conditions
图5. 直线运行条件下车体垂向加速度
同样,在曲线运行条件下随着运行速度增加,横向车体质心加速度,如图6所示,两者的差距在逐渐减小。差距最大的时候在运行速度为200 km/h时,刚柔耦合模型比多刚体模型车体横向加速度大0.119 m/s2。垂向车体质心加速度,如图7所示,两者的差距在逐渐增大。差距最大时的运行速度为280 km/h,刚柔耦合模型比多刚体模型车体垂向加速度大0.085 m/s2。
5.2.2. Sperling平稳性指标
由于和短期内的舒适度考核指标“车体质心加速度”相比,对于长时间车辆运行对乘客产生的影响,Sperling平稳性指标中增加了加速度的幅值以及振动频率的影响。从仿真结果来看,车辆平稳性整体表现随着速度的增加而变差,其中刚柔耦合模型相对比多刚体模型表现不佳。
如图8所示,为横向平稳性指标对比;如图9所示,为垂向平稳性指标对比。
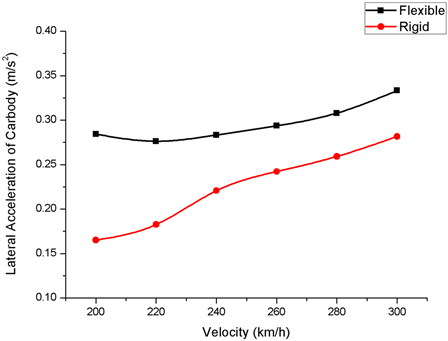
Figure 6. Lateral acceleration of car body under curve running conditions
图6. 曲线运行条件下车体横向加速度
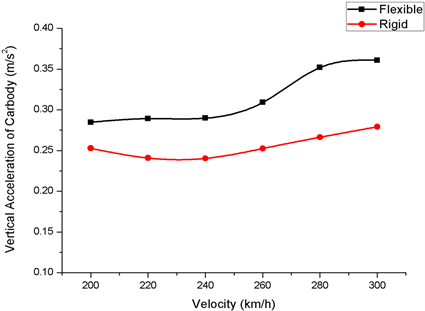
Figure 7. Vertical acceleration of car body under curve running conditions
图7. 曲线运行条件下车体垂向加速度
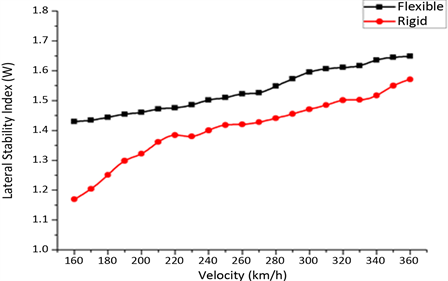
Figure 8. Comparison of horizontal stability indicators
图8. 横向平稳性指标对比
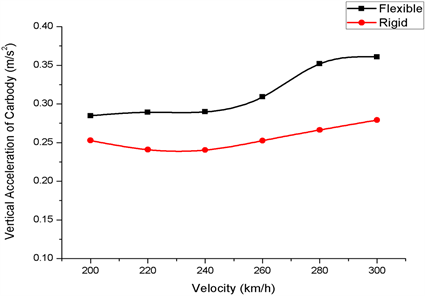
Figure 9. Comparison of vertical stability indicators
图9. 垂向平稳性指标对比
5.3. 曲线通过性能分析
5.3.1. 脱轨系数
在仿真的6个速度工况,由于时速的不同导致轮轨之间作用效果也不同。如图10所示,最明显的表现为在240 km/h之前,作用于轮缘上的侧向力为正,由于时速的提高,离心力作用导致轮缘侧向作用力逐渐减小,并最终改变方向作用于轨道曲线半径内侧,并随之在速度的增加的趋势之下,脱轨系数不断增加。但在计算的六个速度指标中,所得出的每个工况内最大脱轨系数,除了在200 km/h两者接近以外,刚柔耦合模型皆大于多刚体模型。
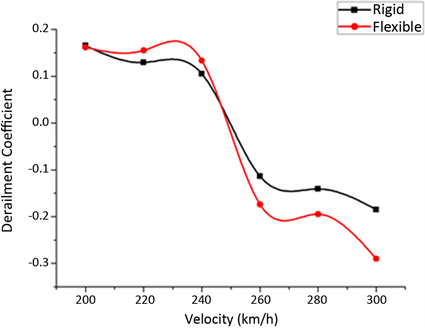
Figure 10. Comparison of derailment coefficient indicators
图10. 脱轨系数指标对比
5.3.2. 轮重减载率
对于轮重减载率的计算分析中,多刚体模型和刚柔耦合模型分别针对于每个轮对为一个观测点,分为前后转向架的前后轮对,一共8组数据,如图11所示(注:ff表示前转向架前轮对;fr表示前转向架后轮对;rf表示后转向架前轮对;rr表示后转向架后轮对)。
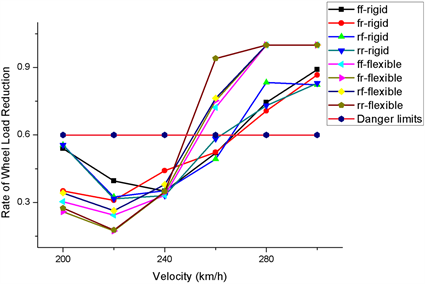
Figure 11. Comparison of wheel load reduction rate index
图11. 轮重减载率指标对比
通过计算结果可以发现,整体趋势,相同速度等级下,刚性模型整体比柔性模型轮重减载率数值小。刚柔耦合模型,最先到允许限度0.6为后转向架第二轮对。且在时速260 km/h以后,在曲线上表现不佳,有一定脱轨倾覆风险。多刚体模型,同样最先到允许限度0.6为后转向架第二轮对。且在时速280 km/h以后,在曲线上同样表现不佳。
6. 结论
本文通过建立多刚体车辆模型和刚柔耦合车辆模型进行仿真分析,研究了多柔体结构耦合系统在轨道车辆模型运行时对动力学指标的影响。结果表明:
1) 临界速度指标中,刚柔耦合车辆模型的临界速度相比于多刚体车辆模型降低了10.56%,采用多刚体车辆模型作为结果参考,会高估车辆在运行时刻的极限表现。
2) 在车体加速度、车辆运行品质以及舒适度指标中,刚柔耦合车辆模型仿真结果高于多刚体车辆模型,表明考虑结构的柔性变形和整体的耦合效应导致车辆平稳性指标的表现更加危险。
3) 车辆曲线通过性能指标中,刚柔耦合车辆模型相比于多刚体车辆模型仿真结果显示,刚柔耦合模型对于曲线通过能力欠佳,尤其运行速度在260 km/h以上时,两者曲线通过性能的差异随速度的增加呈现逐渐增大的趋势。
因此,轨道车辆系统动力学在某些场景中将结构简化为刚性体结构可能会高估车辆运行时的真实表现,从而对后期的判断以及决策产生一定的风险。若对仿真结果允许误差较小,结果需求较精准,建议采用多结构柔性化处理的刚柔耦合建模方式进行仿真计算。