1. 引言
如果想要发展好工业机器人技术,那么必须有其他的许多技术作为辅助,比如说电子技术,计算机技术以及人工智能等多种技术。众所周知,工业机器人在整个现代化的制造企业当中是十分重要的一项技术。一个国家的工业机器人发展技术可以直接的反映出这个国家的综合创新能力,以及整体的制造业水平。我国已经从制造业大国逐渐的走向创业强国,其中机器人的逐渐普及和向多行业应用也是其中的一个重要体现。也正是因为这样,机器人相关技术研究被世界上学者密切关注。
2. 国外搬运机器人发展现状
Versatra和Unimate作为最早的机器人如图1和图2在20世纪中期被研发出来,由Umination公司负责 [1]。随后到上世纪80年代时,资本主义国家对于各个信息领域都开始有了深入的发展,因此欧洲、美国、日本、韩国等多个国家在信息领域获得的发展速度高于其他国家,就搬运机器人领域来说,上述几个国家的搬运机器人发展技术更为完善,发展经验更为丰富。在近几年,伴随着其他国家更多的重视提信息科技领域的发展,越来越多的行业需要搬运机器人为其行业发展提供帮助。基于此,各个国家对于搬运机器人的研究也变得更为深入 [2]。就现阶段的搬运机器人发展研究情况来说,德国的KaKU公司发展技术最为成熟。在多种不同类型的搬运机器人生产方面,德国KuKA公司的生产水平居于世界前茅,
而德国国家的整体机器人研究水平也位于世界前列 [3]。而加拿大的Clearpath Robotic机器人公司则更多的研究高负载物料运输车,重点研究能够提供大体积和大数量的物料运输机器人,解决了现阶段及将来出现的生产车间需要反复进行多次物料搬运的主要问题,进一步提高了工厂及生产车间的工作效率 [4]。日本由于当地人口较少,面积较小,但是生产生活又需要交多生产力,所以在机器人研发方面则显得更为积极。在世界范围内,日本机器人尤其以其质量高超而闻名。像Yaskawa、OTC等公司,日本有诸多公司致力于进行搬运机器人研究,力求通过研发物料搬运机器人进一步解决现阶段在工业生产中出现的劳动力不足问题,从而进一步提升国家的经济发展水平 [5]。
3. 国内搬运机器人发展现状
我国搬运机器人的发展比欧美各国、日本都要晚。1988年,北京邮政科学技术研究所研发了第一套邮政枢纽搬运机器人系统 [6]。1992年天津理工学院研制成功了光学导引搬运机器人,并且光学导引搬运机器人应用于核电站工作 [7],1998年,在红河卷烟厂,昆明船舶设备公司研制了多模式激光导引搬运机器人 [8],近几年来,经过不断研究和发展,国内搬运机器人制造技术逐渐成熟,逐渐向专业化、智能化、集成化的方向发展 [9],取得一定的成就。
在农业生产方面,宋敏等 [10] 针对目前农用机器人大多采用蓄电池为动力装置,存在效率低下、寿命短、污染大等一系列问题,设计一种采用燃料电池做动力装置搬运机器人。此装备适用于一些大型机械无法进入的场合进行搬运作业。并且机器人具有自主导航行驶、防碰避障和目标识别的功能以及解决农用机器人户外蓄电问题。程麟文等 [11] 为实现农业生产管理的智能化,设计一种在仓储物流中搬运箱式农作物的机器人,如图3整体结构。机器人主要包括机械部分和电气控制部分。机械部分主要由四轴关节型机器人本体和运动车体两部分组成,是机器人的主要硬件结构;电气控制部分主要根据机器人工作能力和要求,选用了PLC控制模块、继电器模块、信号转接模块、蓝牙模块、传感器、电机及驱动模块等。研究发现该机器人结构简单灵活、运动平稳,可以出色完成任务。
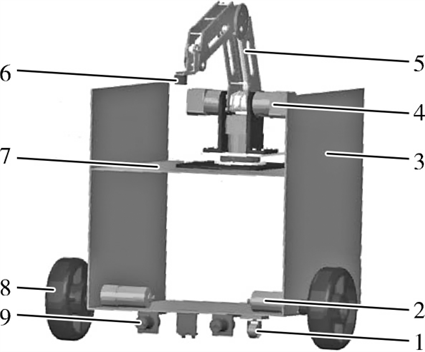 1.万向轮 2.直流电机 3.车体 4.步进电机 5.机器人本体 6.电磁吸盘 7.物料台 8.前轮 9.传感器
1.万向轮 2.直流电机 3.车体 4.步进电机 5.机器人本体 6.电磁吸盘 7.物料台 8.前轮 9.传感器
Figure 3. Overall structure of robot [11]
图3. 机器人整体结构 [11]
在航空领域,曹东江等 [12] 针对棒料搬运和无人机翼下弹药挂装,设计了一种基于双六自由度结构的双臂搬运机器人,如图4双臂搬运机器人整体结构模型。双臂机器人由10个驱动转动环节组成,其中腰部和肩部回转为2个共用关节,双臂各有4个回转关节,组成双六自由度机械臂。机器人两臂间通过一个共同的联接形成物理耦合,它们可以分享使用传感数据,同时通过双臂之间的协调控制,协调运动完成复杂的工作任务。此机构的优点如表1所示。

Figure 4. Overall structure model of dual arm handling robot [12]
图4. 双臂搬运机器人整体结构模型 [12]

Table 1. Comparative Analysis of new and old dual arm handling robots
表1. 新旧双臂搬运机器人对比分析表
在物料分拣方面,朱颖等 [13] 针对现有分拣搬运机器人不可移动、操作单一、无法智能分拣搬运等特点,设计了单目视觉智能分拣搬运机器人。通过对摄像头获取的图像进行中值滤波、去除阴影、图像分割等预处理,结合形状和颜色特征对物料进行识别。提出了基于摄像头角度反馈测距法的目标定位算法,并采用增量式PID控制,使机器人动作更稳定和快速。实验表明该机器人在复杂环境下可准确高效完成物料分拣搬运。如图5为实物图。

Figure 5. Monocular vision intelligent sorting and handling robot [13]
图5. 单目视觉智能分拣搬运机器人实物图 [13]
在自动化领域,王大治等 [14] 为了实现将动力电芯从定制料框中抓取上线到输送线定位托盘中的要求,设计了一种三自由度的直角坐标型搬运机器人,如图6搬运机器人结构图。该机器人由三轴直线移动机构实现三维空间的运动,应用气动抓取机构实现电芯抓取动作。机器人控制系统以PLC为核心,以触摸屏为人机交互界面,运用示教再现的方法,实现动力电芯上料的手自动控制功能。试验表明该搬运机器人系统运行稳定可靠,通过实际应用可有效降低劳动强度,提高生产效率和产品合格率。在医院,由于门诊药房一直存在取药排队时间长的问题,越来越多的医院开始采用自动化药房系统,既节省了药师的时间,又提高了获取药品的准确性,药师可以将更多精力放在为患者解释详细的用药说明和研究药物使用上。为了进一步缩短取药上药用时,代替人工填充和获取药品的流程,李奇 [15] 提出一种新型的自动化药房搬运机器人的设计方案。这搬运机器人由智能药架和自动发药机构成。发药机壳体表面设有出药口、上药口、操作触摸屏、进入内部的门,通过搬运机器人往返于药师与智能药架之间,提高效率和准确性,如图7所示自动化药房搬运机器人。
 1.搬运机器人 2.电芯储存料框 3.输送线体转运托盘 4.动力电芯
1.搬运机器人 2.电芯储存料框 3.输送线体转运托盘 4.动力电芯
Figure 6. Structure diagram of handling robot [14]
图6. 搬运机器人结构图 [14]
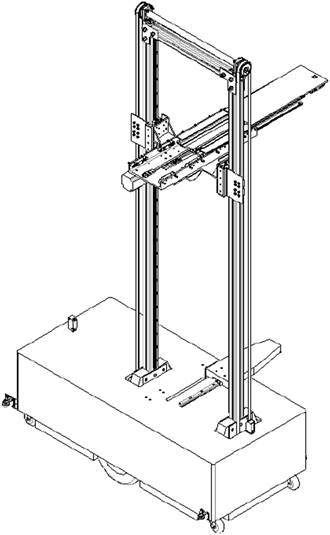
Figure 7. Automated pharmacy handling robot [15]
图7. 自动化药房搬运机器人 [15]
综上所述,不管是在工业制造、仓储物流、医药、食品、化工等行业领域,还是在邮局、图书馆、港口码头、机场、停车场等场景,都能见到搬运机器人的身影。因此以智能制造为技术背景的时代已经提前到来,而智能化的搬运机器人不仅要研究外观设计,而且还要优化其路径规划的方式。
4. 搬运机器人路径规划
路径规划一直都是搬运机器人研究的重要内容。通过路径规划来制定一条从起始点到终止点的最优路径,避免与空间内存在的静态或者动态障碍物发生碰撞,使搬运机器人的总运行时间最短或者路径最短。目前针对搬运机器人路径规划算法的研究成果较为丰硕。根据对环境信息掌握程度不同,可将其分为基于完全信息的全局路径规划算法,基于传感器信息局部路径规划算法,本节主要阐述全局路径规划算法以及其改进算法。
4.1. 基于图形法的路径规划算法
图形法的路径规划算法依靠已知的环境地图以及地图中的障碍物信息构造从起点到终点的可行路径。目前常见有Dijkstra算法与A*算法等。
4.1.1. Dijkstra算法
Dijkstra算法采用了一种贪心模式,其解决的是有向图中单个节点到另一节点的最短路径问题,其主要特点是每次迭代时选择的下一个节点是当前节点最近的子节点。然而此算法搜索时间长,计算复杂度高。针对搜索时间长,梁彧等 [16] 引入了估计函数,通过对路径代价进行估计,可以在缩短响应时间的基础上规划处最短路径,极大提高规划效率。针对计算复杂度,陈智康等 [8] 增加了一部分寻优准则函数,在原本判断为最优路径点之中利用相关路径的信息素或是密集程度做排除,在确定放入FINISH表中之前做好删减,这样在最后就可以从终点到起点再回溯到起点。这样很大程度上减少路径规划过程中产生的冗余点,减少机器人寻路的移动代价。
4.1.2. A*算法
为了解决Dijkstra算法效率低的问题,A*算法作为一种启发式算法被提出。A*算法计算复杂度低,运行速度比Dijkstra算法快,但依赖启发函数,计算量巨大,规划路径的时间过长。赵晓等 [17] 为了解决计算时间长等问题,结合跳点搜索算法对A*算法改进。实验即如果表明改进后的A*算法不仅减少了计算过程中对内存的占用,还能有效提高计算效率。刘子豪等 [18] 结合跳跃点搜索理论,利用先验信息,用选取的关键点代替了传统A*算法中Openlist和Closelist的点,减小了计算量,提高了运算速度。其次,运用反向搜索策略,对路径进行二次规划,删除不必要的转折点,降低了路径长度。最后,将路径在转折点处进行动态圆平滑处理,提高了路径的平滑性。
4.2. 智能仿生学的路径规划算法
对于处理复杂环境下的路径规划问题时,科学家们学会从大自然获取灵感,智能仿生学算法就是人们通过仿生学研究而发明的算法,常用的遗传算法、粒子群优化算法等。
4.2.1. 遗传算法
遗传算法以实现简答,可获得全局最优解等优点 [19],在路径规划问题中也被普遍使用。但是遗传算法对路径问题的搜索是随机、不具有方向性 [20]。因此搜索时间难以控制在理论时间内,并获得最优解的概率也是不确定的。同时在搜索最优解的过程中,对于问题搜索和参数设计所提供的信息很少,这使搜索非常困难。徐梦颖等 [21] 提出一种免疫克隆自适应遗传算法,该算法结合了免疫克隆算子、自适应算子从而提高解的质量,设计栅格模型,给出适应度函数用于计算机器人路径长度,并针对复杂的二维路径编码问题,设计一维路径编码方式。仿真实验表面可减少路径寻优时间,有效提升机器人路径规划的效率。
4.2.2. 粒子群优化算法
粒子群算法由Eberhart于1995年提出,它的基本概念源于对鸟群觅食行为的研究。一群鸟在随机搜寻食物,在这个区域里只有一块食物,所有的鸟都不知道食物在哪里,但是它们知道当前的位置离食物还有多远。因此寻找鸟群中离食物最近的个体来进行搜索,并用于求解优化问题。其算法流程如图8。
粒子群优化算法特点是追踪单个粒子和群体信息共享去寻找最优解。粒子群优化算法具有搜索速度快、计算简单和具有记忆性强等优点,但是种群的多样性和算法的收敛速度之间始终存在着矛盾,同时前期收敛速度快,后期易陷入局部最优的缺点。付兴武等 [22] 提出了一种结合天牛须搜索算法的改进粒子群算法,在改进的粒子群算法中,利用天牛个体的优势,在每次迭代中都有自己对环境空间的判断,使路径更加合理,搜索效率更高。仿真结果表面,与粒子群算法相比,改进的粒子群算法更有效,代价更小。

Figure 8. Flow chart of particle swarm optimization
图8. 粒子群算法流程
4.3. 对比分析
全局路径算法之间的比较及其改进方法如表2所示。
Table 2. Characteristics and improvement methods of global path planning algorithm
表2. 全局路径规划算法特点与改进方法
基于图形法的路径规划算法依靠已知的环境地图以及地图中的障碍物信息构造从起点到终点的可行路径。然环境发生变化,如出现未知障碍物时,该方法就无能为力了。它是一种事前规划,对机器人系统的实时计算能力要求不高,并且对环境模型的错误辨识及噪声鲁棒性差。因此图形学的路径规划要在环境地图与实时障碍物寻求平衡。
5. 搬运机器人研究方向
现阶段针对搬运物料机器人的研究已经显现出了比较明显的效果,从当前的研究情况来分析,未来机器人发展会愈演愈烈,并且会有较好的发展前景。在经过一段时间发展后,针对物料搬运机器人的研究重点则会更多地放在针对搬运方面的数据性能完善上,主要有四个发展方向:其一是高负载能力的提升,对于搬运机器人来说,承载能力会是未来研究的主要方向;第二则是机器人的可靠性提升 [23]。一般来说,机器人的零件越多,结构越复杂,在工作时出现概率的故障也就更低。因此,在未来的发展过程中,为了进一步提高机器人工作效率会着重提高搬运机器人的工作稳定性 [24];第三点则是人机交互技术的运用,机器人更多的在人们的生活中频繁出现,因此在未来进一步提高机器人与人类的交流效率,将极大程度上帮助机器人获得更好的发展渠道,提高交流效率,为机器人未来发展奠定更好的基础;最后一个方向则是智能化发展 [25]。机器人诞生从根本上来说节约了人力资源,但是在未来,机器人发展的智能化要求将会被不断提高。更多的人要求机器人并不是只能简单的完成代替人力操作,还要求机器人根据实际情况进行反应。增强机器人的工作稳定性和工作效率将成为未来机器人发展的主要方向 [26]。
基金项目
高层次人才启动项目(XJGC20190927);贵州省科技计划项目(黔科合基础[2019] 1152号);国家级大学生创新创业训练计划项目(202014440066)。