1. 引言
在过去的几十年里,由于多智能体系统的一致性问题在工程领域的广泛应用而备受关注,例如传感器网络、无人机和编队控制 [1] [2]。此外,对于多智能体系统的理论研究目前也取得了一定的进展,但值得注意的是目前很多关于多智能体系统的一致性研究,都是在系统的噪声和状态完全可知的假设下 [3] [4] [5] [6]。然而在现实生活中,很难捕捉到正确的噪声特征,当然也有少量的文献考虑到了这一问题,如 [7] [8] [9],但这还远远不够。
对于所谓的多智能体系统一致性控制,其一般包括共识控制、编队控制、优化、分布式任务分配、估计和智能协调,在这些问题中,一致性问题是最具有代表性的。它的目标是通过设计合适的分布式控制协议,使所有智能体的状态或输出最终同步。在多智能体系统中往往存在大量的多智能体,为了达到一致性的要求,它们之间需要大量信息交流,而这种交流是需要通过公共网络完成的,由于公共网络中噪声的存在,智能体所接收的数据也通常会存在一些误差,这就会对系统的分析存在一定影响。尽管关于一致性的文献越来越多,但只有少量文献认为噪声是影响系统性能的一个因素。当然,对于非线性的多智能体系统也有类似的研究。这些结果虽然考虑了噪声的影响,但还远远不够。基于这些讨论,自然产生一个问题:若噪声完全陌生,如何处理多智能体系统的一致性,以确保系统达到理想的领导跟随一致性?为了解决这个问题,可考虑将噪声放在一个有界椭球中。此外,由于领导跟随的框架下,跟随者的状态在一定时间后会包含在领导者状态形成的一个安全区域,这个安全区域可作为一个椭圆。综上所述,我们可考虑利用集员滤波的方法来处理领导跟随的一致性。
此外,现有的关于多智能体系统中事件触发的研究大多只关注领导者和直接追随者之间的信息调度,而很少关注与领导者不直接相关的追随者。故在本文中,我们考虑将多智能体分为三类:1) 领导者;2) 直接跟随者,可以直接获取领导者的信息;3) 不能直接获得领导者信息的间接追随者。事件触发机制旨在减少领导者与直接追随者、直接追随者与间接追随者之间不必要的信息交流。本文的研究目标是在事件触发下的线性多智能体系统的集员领导跟随一致性。本文的主要挑战总结如下:1) 对于线性多智能体系统,如何使用局部信息而不是整体信息设计分布式一致性控制协议?2) 估计椭球和共识椭球之间是否存在联系?如果有,是什么联系?3) 如何设计事件触发协议,以确保减少所有智能体之间不必要的数据传输?4) 如何获得观测器和控制增益以及椭球参数?本文的主要贡献包括:1) 为在事件触发协议调度下线性多智能体系统引入了集员领导一致性的概念;2) 与现有文献相比,所设计的事件触发协议减少对所有智能体之间不必要的信息传输;3) 通过递归凸优化算法,可获得观测器、控制器的增益,以及椭球和事件触发的协议的参数。
2. 问题描述
本文我们考虑一类由一个领导者和N个跟随者组成的多智能体系统,其中第i个跟随者的方程为:
(1)
输出为
(2)
其中
,
,
分别是第i个跟随者的状态、控制输入、测量输出。
,
,
,
和
都是时变的矩阵。
和
分别为系统噪音和测量噪音,满足下列条件
(3)
其中
,
都为已知的矩阵。
领导者的方程为
(4)
测量输出为
(5)
其中
是领导者的状态。
,
,
都是时变的矩阵。
为系统噪音,满足
,其中
为已知的矩阵。
定义1:如果多智能体系统(1)和(4)满足领导跟随的一致性,则下式成立
(6)
在现实生活中,传感器的性能在各个方面都受到很大的影响。因此,通过传感器获取代理的完整动态信息是不现实的,一般只能得到部分信息。受此启发,可为跟随者i和领导者s分别设计一个状态观测器:
(7)
(8)
其中
和
分别是跟随者i和领导者s的估计状态。
和
是我们所需要设计的状态观测增益矩阵。
为了更好地研究问题,在本文中我们将多智能体系统分为三类:1) 领导者;2) 能直接从领导者处获得信息的直接跟随者;3) 不能从领导者处获得信息的间接跟随者。此外,为了减少智能体之间不必要的信息传输,本文设计了三类的事件触发协议:1) 对于领导者s,若信息满足此协议的触发条件,则所有直接跟随者都能收到领导者s的信息;2) 对于领导者与直接跟随者i,若信息满足此协议的触发条件,则跟随者 能收到领导者的信息;3) 对于直接跟随者i与间接跟随者j,若信息满足此协议的触发条件,则间接跟随者j能收到相应的直接跟随者i的信息。假设这三类事件触发协议的触发时间分别为
,
,
,递归的方式如下所示:
(9)
(10)
(11)
其中
,
,
,
,
和
都是已知的正整数,
。
,
和
都是未知的权重矩阵。
经过上述讨论,跟随者 的控制输入可为
(12)
其中
是未知的控制器增益。
在不完全知道智能体的状态信息和基于观测器的共识协议(12)下,我们提出了集员状态估计。
定义2:对于(1)所描述的多智能体系统,如果所有跟随者的状态
属于状态椭球
,
(13)
对于所有的
,有界系统噪音
和
。
为时变矩阵,这样的椭球我们就称为跟随者i的集员估计椭球。
同样地,对于领导者s,我们也有类似的定义。
定义3:对于(4)所描述的多智能体系统,如果所有领导者的状态
属于状态椭球
,
(14)
对于有界系统噪音
。
为时变矩阵,这样的椭球我们就称为领导者s的集员估计椭球。
接下来,我们为线性多智能体系统提出了一个新的集员领导跟随一致性概念。跟随者的真实状态总是包含在领导者状态的一个置信区域中。
定义4:如果存在增益矩阵
,
和
,使得跟随者的状态
,
始终包含在一个领导状态椭球
,
(15)
对于所有的
,有界系统噪音
和
。
为时变矩阵,这样我们就认为(1)和(4)所描述的多智能体系统实现了领导跟随一致。
跟随者i和领导者s的初始状态满足下列条件:
其中
,
,
都是已知的矩阵。
本文的目标是找到矩阵
,
,
。
3. 最终结果
在本节中,研究了事件触发机制下线性多智能体系统的集员领导一致性问题。
定理1:对于存在未知但有界噪音
,
,
的(1)和(4)所描述的多智能体系统,假设在k时刻,跟随者i的状态
,领导者s的状态
始终分别属于
,
。接下来,在
时刻,跟随者 的状态
,领导者s的状态
分别属于状态估计椭球
和
,如果存在矩阵
,
,
,
,以及常数
,使得下列矩阵不等式成立
(16)
(17)
其中
,
,
,
,
,
证明:在k时刻,我们有
,根据Cholesky分解,存在向量
满足
(18)
其中
,
。
因此我们可得到跟随者i在
时刻的状态估计误差
(19)
其中
,
。因此(13)可等价为
(20)
由(3)和(18),且若
,
,
,则
(21)
利用S过程,我们有
(22)
最后利用Schur引理,我们有(16)成立。由于(17)的证明类似,就不再展开。
定理1实现了集员估计,换句话说,跟随者i和领导者s的下一步状态的估计误差总是包含在一个有界椭球中。在此基础上,我们有以下定理。
定理2:对于存在未知但有界噪音
,
,
的(1)和(4)所描述的多智能体系统,假设在k时刻,跟随者i的状态
和领导者s的状态
的状态误差始终属于状态一致椭球
。如果存在矩阵
,
,
,
,
,以及常数
,使得下列矩阵不等式成立
(23)
于是跟随者i的状态
永远包含在一致性椭球
,其中
,
,
,
证明:在k时刻,有
,根据Cholesky分解,我们有
。定义
,因此
(24)
故我们可知在在
时刻的状态跟踪误差
(25)
其中
,
。故(13)可等价为
(26)
定义
,
,
,
,
,则下列不等式是成立的
(27)
另一方面,如果事件触发协议满足
,
,
,则信息不会传输,因此我们有
若假设
,
是对称矩阵,其中
,
,
,
,
,
,其余部分都是0矩阵,因此上式可等价为
(28)
利用S过程,我们有
(29)
最后由Schur引理,(23)成立。
值得注意的是,定理1和2给出了确定椭球的规则,包括跟随者i和领导者s的真实状态,以及集员一致性的控制,但没有给出最优椭球。因此,通过凸优化方法,将所提出的事件触发机制下线性多智能体系统的集员领导一致性问题转化为寻优问题,从而求解最优椭球
(30)
其中
。
本文所设计的凸优化算法如表1所示

Table 1. Recursive convex optimization
表1. 递归的凸优化算法
4. 数值仿真实例
在本节中,我们将介绍一个示例来说明主要结果的有效性。假设系统的参数分别为:
,
,
,
,
,
,
,
此外,系统状态的初始值为
,
,
,
,
,
,
都为4,
,
,
,
,
,
,
,
,
,
,
,
,
。图1给出了智能体之间的通信交流图。
图2和图3绘制了5个智能体的真实状态和通过状态观测器所得的状态,通过这两图,可知我们所设计的状态观测器具有良好的性能。图4和图5画出了跟随者与领导者之间的状态跟踪,由两图可知,所设计的控制器满足领导跟随一致性的要求。
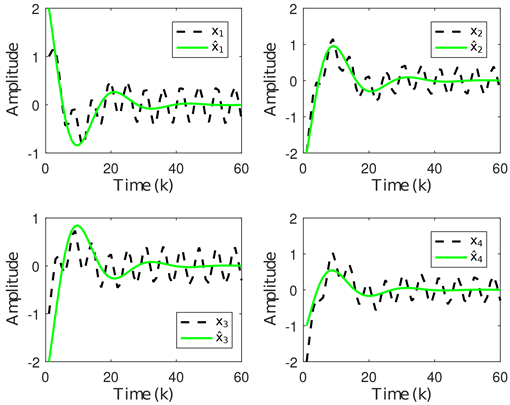
Figure 2. The true states #Math_229#, and the states estimation
图2. 真实状态
和估计状态
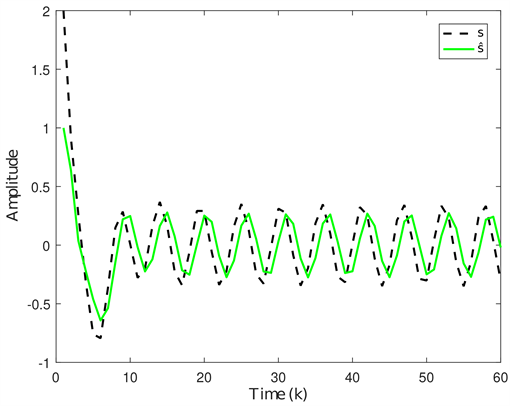
Figure 3. The true states #Math_234#, and the states estimation
图3. 真实状态
和估计状态
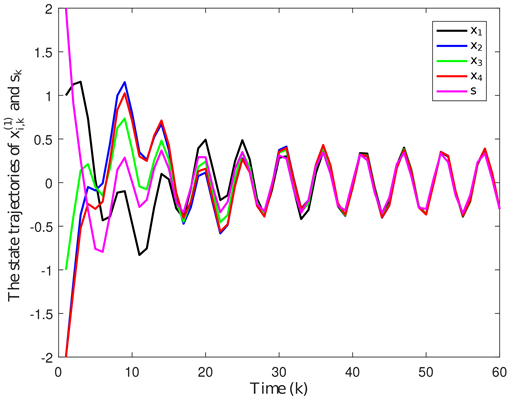
Figure 4. State trajectories of followers
and leader
图4. 跟随者
和领导者
的状态跟踪
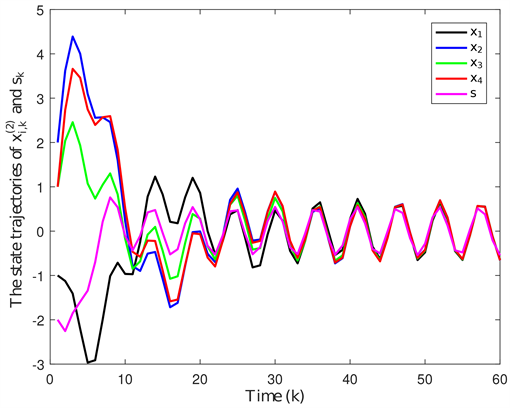
Figure 5. State trajectories of followers
and leader
图5. 跟随者
和领导者
的状态跟踪
5. 总结
本文研究了事件触发协议下线性多智能体系统的集员领导跟随一致性问题。对于多智能体系统,本文利用事件触发协议减少了智能体间的不必要信息传输。引入一个分布式观测器来观察每个智能体的真实状态,智能体的状态总是在一个有界椭球内。提出了分布式控制器,以达到预期的领导跟随一致性。在集员滤波的框架下,利用递推凸优化算法获得了观测器和控制器的增益以及椭球参数。最后通过一个算例验证了该方法的有效性。此外,在本文研究的基础上,下一步考虑将本文的结论推广到非线性的合作与竞争多智能体系统上。