1. 引言
无人机在执行任务中,有时会遇到在静态任务规划阶段无法预知的障碍威胁。固定翼无人机与旋翼无人机飞行特点不同,固定翼无人机遇到障碍威胁不能先悬停再避障,因此在接触到威胁之前,制定妥善的躲避策略来规避威胁,对确保无人机执行任务成功概率和飞行安全至关重要,相关研究可参见文献 [1] - [9]。面对突然出现的障碍威胁,时间上不允许地面控制人员对无人机进行全局路线重规划,通过调整局部轨迹方法来规避威胁,是一种较好的选择。当障碍威胁被无人机探查到时,何时通过内置算法执行规避动作,从而使得飞行轨迹最短,这个问题值得探讨。
在规避障碍威胁局部轨迹调整的设计上,如图1所示,无人机由A点飞向B点,圆O1、O2为无人机飞行高度的威胁范围,M、N为无人机导航点。为了确定无人机导航点的位置,通常会在威胁范围之外确定一个安全圆,如图1虚线部分所示,而后在安全圆上选定若干导航点,如图M、N所示,使无人机绕过威胁区域。如果采用直线路径作为无人机飞行路径,导航点数量少时,将会导致飞行路线与威胁区域的交叉,使无人机处于威胁空间之中。增大安全圆的范围,可以使线段MN避免与威胁范围交叉,但一方面会使精细计算出的安全范围变成非最优,另一方面也有可能让两个安全圆重叠而导致可飞路径消失。
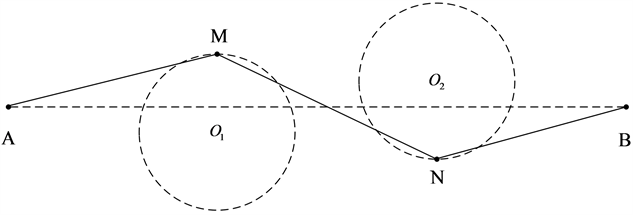
Figure 1. Straight path to avoid threats
图1. 直线路径规避威胁示意图
在安全圆上增加导航点的数量能解决路径与威胁区域相交的问题,但增加多少个航点能够避免飞行路线与威胁空间交叉,如何确定航点的位置将又变成另一个难题。从微分角度考虑,沿着安全圆增加足够数量的航点,这些点的连线将趋于一条曲线,如图2所示,用一段圆弧代替安全圆上数量众多的直线段将使问题的复杂度降低。
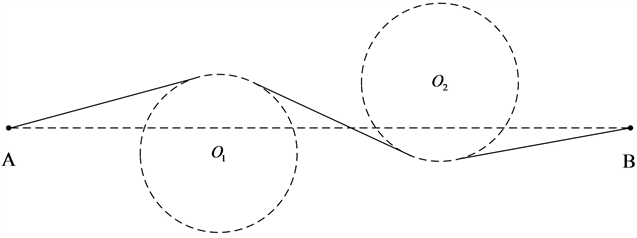
Figure 2. Combine straight and curved lines to avoid threats
图2. 直线与曲线结合规避威胁示意图
基于以上考虑,采用直线加曲线的方法,绕过威胁是一种比较好的选择,生成这样一段曲线的方法很多,本文采用Dubins路径 [10] [11] [12] [13] 的方法。
2. Dubins路径
1957年,Dubins研究了带有方向的两点的最短路径问题,不考虑曲率时最短路径为直线,考虑曲率约束时该轨迹则为圆弧 [14]。Dubins路径定义为:在最大曲率限制下,平而内两个有方向的点间的最短可行路径是CLC路径或CCC路径(如图3所示),或是其子集 [15]。
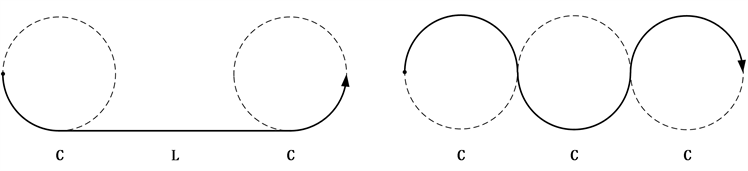
Figure 3. CLC and CCC type Dubins path
图3. CLC与CCC型Dubins路径
其中,C表示圆弧段,L表示与C相切的直线段。CLC由两段圆弧及其公切线组成,CCC路径由三段连续相切的圆弧组成。CLC和和CCC路径的子集为CL、LC和CC。无人机传感器探查到威胁时,通常与障碍物会有一段距离,不涉及到连续调转方向来规避障碍的飞行姿态调整,因此这里只考虑CLC型路径。
这里采用解析几何的方法描述Dubins路径。根据前文所述,Dubins路径为两段圆弧加一条公切线,其中起始和终止位置都在圆弧上,圆弧中心为曲率中心,圆弧的半径是曲率半径,在障碍区曲率半径由威胁范围确定,非威胁区曲率半径由无人机最小转向半径决定。无人机也可以选择其他非曲率半径进行转向,但以最小转向半径为曲率半径时,路径长度最短 [16]。
 (a) 外公切线型Dubins路径 (b) 内公切线型Dubins路径
(a) 外公切线型Dubins路径 (b) 内公切线型Dubins路径
Figure 4. CLC type Dubins path
图4. CLC型Dubins路径
图4为CLC型Dubins路径,其中主要符号为:
为起始位姿点,Cs为起始圆,Os为圆心,
为半径;
为终止位姿点;Cf为终止圆,Of为圆心,
为半径;
外公切线在Cs和点分别在Cf上的切点分别为PM、PN;
起始圆的圆心Os与终止圆的圆心Of连线为
;
起始曲率
,其中
;
起始曲率
,其中
。
确定CLC型Dubins路径主要是确定两圆公切线的切入点和切出点,如果切点不存在,CLC型Dubins路径就不存在。因此,需要根据起始圆、终止圆的相对位置来考虑。其中,Os、Of分别为起始圆和终止圆的圆心,
、
分别为起始圆和终止圆的曲率半径,圆心距
。
根据两圆位置关系:
a) 两圆同心时,
,
,
,无公切线,不存在CLC路径;
b) 两圆内切时,
,
,
,有1条外公切线,但不存在CLC路径;
c) 两圆相交时,直接由三角关系可得,
,
,有2条外公切线,存在2条CLC路径;
d) 两圆外切时,
,
,
,有2条外公切线,有1条内公切线,存在2条CLC路径;
e) 两圆相离时,
,
,有2条外公切线,有2条内公切线,存在4条CLC路径。
因此,存在外切线型CLC路径的条件是:
(1)
存在内切线型CLC路径的条件是:
(2)
根据切线的数量,我们能够发现,无人机在同一位姿点,
方向固定情况下,能够生成4条可行的CLC型Dubins路径来规避威胁,如图5所示。
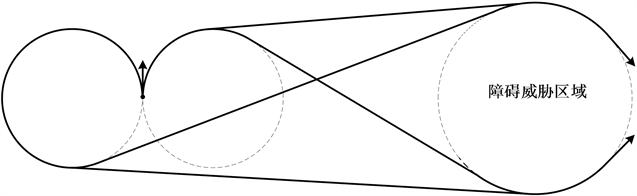
Figure 5. Generate feasible CLC Dubins path from the same pose point
图5. 同一位姿点生成可行的CLC型Dubins路径
如果
的方向自由,则能够生成8条可行的CLC型Dubins路径。因此,在路径规划时,需要从每对起始圆和终止圆路径集合
的所有解决方案中,选择最短的路径作为最终的航路。
3. 障碍威胁情况判断
无人机平飞时,如遇突发障碍威胁,首先确定威胁安全圆是否与飞行轨迹相交,如与飞行轨迹相交,则需要计算产生规避威胁的路径,而后无人机跟随该轨迹完成规避动作,对于那些与无人机轨迹不相交的威胁区域则不需要考虑规避的问题。因此,判断威胁区域是否与飞行轨迹相交,是无人机规避该障碍威胁的首要问题。
图6为威胁区域与无人机飞行路径相交示意图。图中,
为无人机飞行路径轨迹,与威胁圆交于点
、
,威胁圆中心到飞行路径直线段起点距离为
、到直线垂线为
,
为威胁圆的曲率半径,
为威胁圆的曲率,
为
与
的夹角。

Figure 6. The straight path intersects the threat area
图6. 直线路径与威胁区域相交
如上图,直线与圆相交,可得
(3)
根据余弦定理有
(4)
移项得
(5)
二次方程的解
为
(6)
的两个解对应交点
和
,其中
的值为
,
的值为
。由于
的两个解应为实数解,因此
(7)
整理可得
(8)
,上式可写成
(9)
与公式(3)条件等价,因此当直线与威胁区相交时则存在实数解。当直线段与多个威胁区相交时,该交点可用于区分与那个威胁区相交。当检测到飞行路径与威胁区相交时,则需以最小转弯半径为曲率半径,在当前位姿点和目标点分别建立起始圆和终止圆,生成起始圆与威胁区安全圆、威胁区安全圆与终止圆相切的线段,通过生成Dubins路径来实现突发威胁的规避。
4. 无人机轨迹调整与最短轨迹
确定无人机会与障碍威胁相交后,无人机可采用左、右盘旋,通过Dubins路径的切出威胁区安全圆,避过障碍威胁直飞至导航点,如图7所示。

Figure 7. UAV avoid threats through Dubins path
图7. 无人机通过Dubins路径规避威胁示意图
图中,无人机计划由A点飞至B点,在C点发现威胁后计算调整路线飞行至D点,接着采取右盘旋方式转向绕威胁区飞行,其中M为圆弧段飞行路线切入点,N为圆弧段飞行路线切出点,而后飞行至B点。威胁区半径为
。
根据图7,无人机无论左盘旋还是右盘旋绕过威胁区,Dubins路径直线段均为内切线,此时还需满足公式(2)
的要求,即直飞路径还需增加一段
,即无人机距离威胁区至少为:
(10)
无人机在满足
的情况下,转向规避威胁时机的早晚,对航迹长度是否有影响,即发现障碍就向障碍威胁做切线运动还是等靠近障碍再做切线运动,哪种策略航迹最短,需要进一步讨论。
假设无人机在两点间由右至左运动,飞行策略采用先直飞一定距离,而后通过Dubins路径调整飞行角度到达指定目标点,如图8所示。
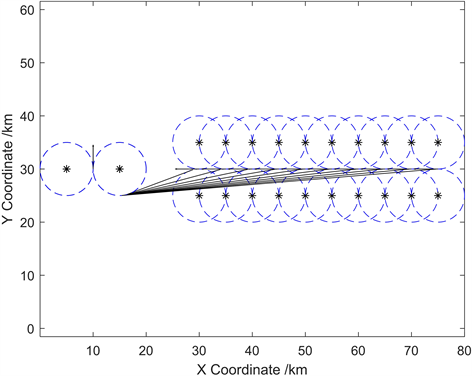
Figure 8. Dubins path generated by different turning timings
图8. 不同转弯时机生成的Dubins路径
无人机飞行路径的总距离为:
(11)
其中
为总飞行距离,
为按原方向直飞路径距离,
为Dubins路径距离。直飞距离间隔5km采样一次,通过仿真计算得到飞行路径长度如表1所示。

Table 1. Total flight path length
表1. 无人机飞行路径长度表
Dubins路径长度与总飞行路径长度之间的关系如图9所示。
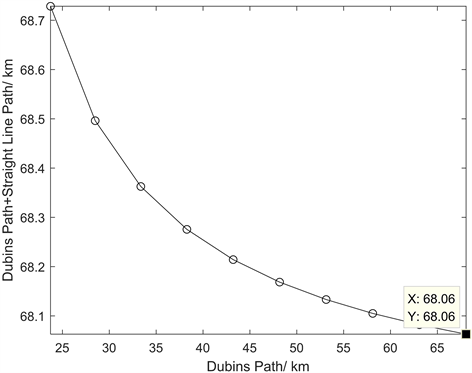
Figure 9. The relationship between Dubins path and total flight path length
图9. Dubins路径长度与总飞行路径长度的关系
由表1和图9可以看出,随着Dubins路径长度的增加,无人机飞行路径总长度变短,且减小趋势变缓。当Dubins路径的长度等于总飞行路径长度时,即离目标最远,按原方向直飞距离为0时,直接向目标圆切点方向飞行,此时总飞行路径最短。
5. 结束语
针对固定翼无人机与旋翼无人机飞行特点不同,固定翼无人机遇到障碍威胁不能先悬停再避障的问题,本文给出一种基于Dubins路径动态调整飞行轨迹方法,研究了Dubins路径的基本理论及无人机航迹与障碍威胁区相交的判断方法,给出了基于Dubins路径的突发威胁规避策略,并针对何时向威胁区做切线运动路径最短的问题进行了探讨。仿真计算得出随着Dubins路径长度的增加,无人机飞行路径总长度变短,且减小趋势变缓。当Dubins路径的长度等于总飞行路径长度时,即离目标最远,按原方向直飞距离为0时,直接向目标圆切点方向飞行,此时总飞行路径最短。即无人机越早做出规避动作飞行路径越短,该结论也符合无人机操作人员发现突发威胁时,大脑试图立刻控制无人机进行规避的应激反应。本文探讨的解决问题方法具备规划路径短,算法简便高效等特点,可为固定翼无人机任务规划系统设计提供参考思路。