1. 引言
在复杂多变的海战上,电子侦察更加重要。电子侦察是指搜集敌方情报,截获敌方的辐射源信号,分析信号参数与用途,从而确定敌方的位置,制定相应的作战计划。在电子侦察系统中,对敌定位是最为关键的。根据观测站是否向外辐射电磁信号,将其对辐射源的定位可以分为有源定位和无源定位 [1] 。无源定位具有定位作用距离远、成本低、隐蔽性强的优势,因此具有重要的理论和实践意义。时差频差联合定位是无源定位的非常好的方法,且联合定位比单一时差或者频差定位具有精度高、所用花费少的特点。针对海上无人机群定位准确度问题,现有的提高精度的方法有经典的Chen算法 [2] 、泰勒级数法 [3] 等,本文以具体事例进行解算验证,首先对无人机群定位问题进行分析,给出时差频差理论上的最大范围,进行缩短搜索范围,利用离散采样信号的模糊函数和改进的粒子群搜索法,得到时差和频差的联合估计确定目标,进行路径规划。
2. 预备知识
为了解算无人机最优路线定位问题,先从两架无人机入手。假设在一个辐射源的条件下,根据2架无人机初始位置、飞行速度以及同步采集的目标辐射源信号,确定辐射源的位置,并分析定位误差;然后进一步研究在2架无人机飞行机动的条件下,如何对2架无人机的航迹进行优化,给出无人机的最优几何构型,实现对辐射源的快速准确定位。在忽略地球曲率带来的影响且无人机没有横滚和俯仰的情况下。考虑电磁波很难穿透海水,所以辐射源设定在海面上,假设局部海面是水平面,无人机的飞行速率为定值,飞行轨迹在同一个水平面上。
1) 辐射源信号公式
被动定位系统中两架无人机接收到的辐射源信号公式分别是
(2-1)
其中
是第i架无人机收到信号在t时刻的量化值,
是发送信号在t时刻的量化值,
是从信号源到无人机i的路径传播延迟,
是信号源到无人机i的传播路径增益系数,
是多普勒频移导致的频率漂移值,
是t时刻的复噪声。
2) 互模糊函数
与
互模糊函数 [3] (CAF)定义为,
, (2-2)
其峰值对应的
与
就是两路信号的时差与频差,S. Stein证明了互模糊函数法是时差频差参数的最大似然估计。
3) 离散模糊函数及其计算 [4]
假设信号
和
的时间长度为T,假设信号
和
为信号
和
的离散采样序列,即,
, (2-3)
其中,
为采样时间,对应的采样频率为
,
为时间轴上的离散采样序号,
,N为时间长度T对应的离散点的数量,N为正整数。根据式(2-1)中连续信号模糊函数的定义,离散采样信号
和
的离散模糊函数可以定义为,
, (2-4)
其中,非负整数
和
,分别为时延
和多普勒频率
的离散采样序号,满足关系式
和
。
4) 定位误差的几何稀释
定位误差是目标位置
的函数,为了更好的描述这种关系,可以定义一个名词为“定位误差的几何稀释(GDOP)”,用下式表示:
二维情况:
。
3. 建立模型及求解
3.1. 态势图及时差频差方程
假定给出了两架飞机的初始位置坐标,所以坐标系已经建立,由于电磁波很难穿透海水,故辐射源可假设在海面上,以海面为xoy面。图1给出的无人机群协同侦察监视示意图,根据该示意图,由实际测量给出的2架无人机的初始位置
和
,可建立如图的坐标系,设辐射源位置为
,得到初始t时刻飞机与目标的位置关系。
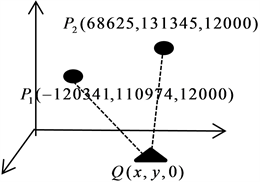
Figure 1. Relationship between aircraft and target position
图1. t时刻飞机与目标的位置关系图
由该态势图,可以建立接收辐射源信号的到达时间差TDOA方程和接收辐射源信号的到达频率差FDOA方程即,
(3-1)
(3-2)
其中,
为t时刻信号时差,
为频差,
为光速,
为信号波长。
3.2. 时差频差的联合估计
在对时差/频差联合估计中,可以由(2-1)式直接通过互模糊函数搜索峰值的位置来估计时差和频差,但这种方法需要在时域和频域二维空间上进行计算与搜索,计算量很大,所以我们采取粒子群搜索法求(2-4)式中时差/频差函数的最值,得到时差/频差的联合估计。
1) 频差的范围估计
设辐射源的位置坐标为
,两架无人机的位置坐标为
与
,速度矢量分别为
与
,由下式可以估计频差的范围。
(3-3)
其中
,根据(4-3)式,代入两架无人机的初始位置
和
以及初始速度
和
,由Mathematica可以算出频差
的最大值168.686和最小值−22.6593,从而估计出频差的范围(−22.6593, 168.686)。
2) 时差的范围估计
根据时差的定义,以及无人机和辐射源共面,不难得到时差的最大范围是
(3-4)
其中
,根据(4-4)式,代入两架无人机的初始位置
和
,由Mathematica可以算出的最大值和最小值,从而估计出时差的范围
。
下面在上述两步估计出的时差和频差的估计范围内,对时差和频差进行联合估计。
3) 时差频差的联合估计
由(2-4)式,利用网格法和搜索法,求(2-4)式中时差/频差函数的最值,即通过求解下述模型得到时差和频差函数的最值,
, (3-5)
图2是由上述模型和算法得到的解的图形,其中图2是某次的计算结果,“o”表示现有网格搜索算法得到的估计结果,“☆”表示粒子群搜索法得到的估计结果。由计算过程看,粒子群搜索法的用时少,从结果看,其找到的目标函数值要大于网格搜索的目标函数值。因此在后面的计算过程中,选择了粒子群搜索法的结果作为时差频差的估计。
3.3. 定位模型与算法
1) 定位模型
设t时刻信号时差为
,频差为
,光速为c,信号波长为
,辐射源的位置坐标为
,两架无人机的位置坐标为
与
,速度矢量分别为
与
,则有TDOA与FDOA方程如下:
, (3-6)
, (3-7)
其中
,
。
对于该模型,没有直接求其解析解,为了提高求解速度,又能保证结果的准确性,(3-6) (3-7)的模型求解采取了如下的求解方法:以模型中的误差尽可能小作为目标。
(3-8)
其中
是预先给定的适当小的正数,左边式子中第–部分除以
,第二部分除以
的目的是为了消除量纲的影响,采取了去量纲化的方法,保证各自的贡献是平等的。(3-8)式亦即,
(3-9)
利用搜索法,可以得到上述模型中的目标位置的估计,注意的是模型的估计结果往往是不唯一的,根据文献中的研究,(3-6) (3-7)的结果往往是两个解,本文的方法也同样会出现多解的情形,在无人机的上方,从第一架无人机到第二架无人机的连线方向看,目标位置在右侧的估计为(13.4739, −155.5144),目标位置在左侧(无人机飞行的方向)的估计为(−137.6866, 373.9484)。
2) 误差分析
为了分析上述算法估计结果的误差性质,用Monte Carlo进行模拟,将其结果的平均作为目标位置的结果,通过Matlab模拟,置信水平为80%的最大距离误差是185.932,置信水平为90%的最大距离误差是230.638。
3.4. 无人机路径优化
研究两架无人机协同侦察中,路径优化问题,要求是实时规划,快速准确。通过提供的在任意时刻,且得到无人机速度的条件下,目标的电磁波信号。在这样的条件下,优化无人机路径,使得目标定位快速精确。以下采用径向速度差方法进行估计。
两机相对定位目标位置的径向速度越大,越有利于减小信号频差的相对误差,因此,关于两机协同左右机动,可以考虑使用方程
则可使左边最大即为径向速度差最大。
(3-10)
给出下一机动周期的机动速度方向。期中
为飞机当前位置点,
为目标源的位置点。
为下一机动周期的机动速度向量。期中
为飞机平均速率方向与x轴的角。
下为(3-10)计算的无人机实时机动定位结果,图3位协同机位,从结果来看,比上述3.3的方法更加精确,误差范围要小,精度提高15 ns,计算时间小于0.01 s。图4给出两架无人机协同机定位时,对应的角度变化,基本是第一架左转,第二架无人机右转,即呈现分离的态势。
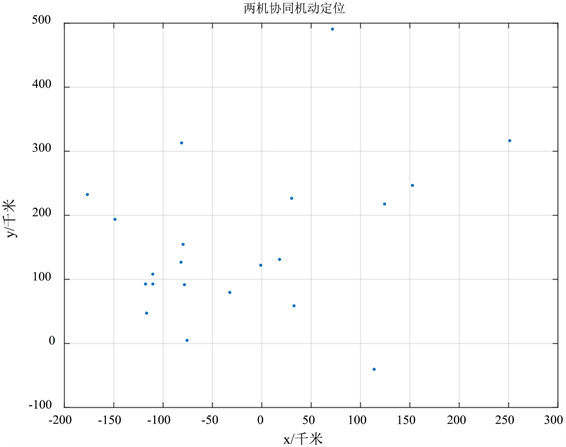
Figure 3. Target location under the cooperation of two UAVs
图3. 两架无人机协同下目标定位
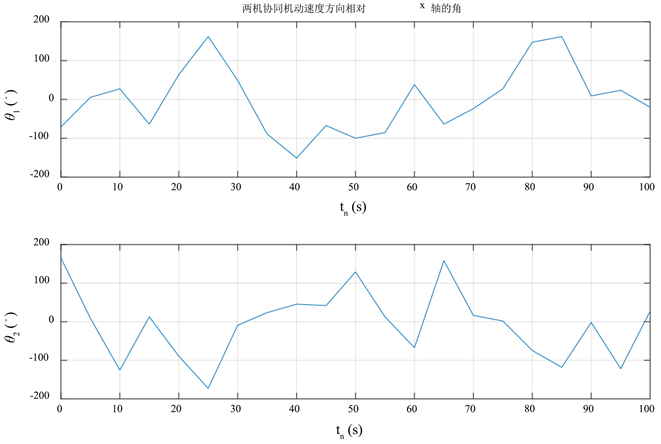
Figure 4. Maneuver speed direction of two UAVs under cooperation
图4. 两架无人机协同下各自的机动速度方向
4. 结论与改进
本文研究了双机海上协同侦查定位问题,制定了相应的TDOA/FDOA联合定位数学模型,用蒙特卡洛算法模拟真实位置来测算模型结果的准确性,从已有的结果来看,时差频差的高精度估计是影响无人机群实时定位的重要因素。对于如何解决高精度目标定位和实时快速计算,本文还有许多改进的地方。
一是,需要将接收到的电磁波信号进行滤波,以提高信号的信噪比;
二是,利用互模糊函数估计时差频差的计算上,需要进一步研究,提高精度;
三是,在得到高精度的时差、频差估计的前提下,可以估计出目标的俯仰角和方位角,利用这两类信息构造目标定位方法也是值得研究的。