1. 引言
在过去的二十年中,移动机器人已广泛应用于各种工业过程。移动机器人的关键挑战之一是控制系统,它被称为一类典型的非完整系统 [1] [2] 。移动机器人控制系统设计中的一个重要方向是轨迹跟踪。移动机器人是一个耦合的非线性系统,它不能满足Brockett的必要条件 [2] ,使传统的设计方法难以达到控制目标。近年来,非完整移动机器人的跟踪控制问题越来越受到关注。Wang Yaonan等人 [3] 通过使用相应误差模型的泰勒线性化提出了跟踪控制律。为扩展在笛卡尔空间中的轨迹跟踪问题,Urakubo T等 [4] 提出了平滑控制律,该控制律在任何初始条件下都可实现指数稳定性,从而可提高算法的收敛速度。Morin P等人利用链式结构提出了一种时变反馈控制方法 [5] 。为了进一步研究跟踪问题,科研工作者已经做了大量的研究工作。滑动模式控制策略提出了滑模面的控制方法 [6] ,文 [7] 中考虑了具有有界干扰情况下的滑模控制问题。文 [8] [9] 中引入了平滑时变反馈控制律,保证了控制系统的全局指数收敛。通过将级联设计和反推方法相结合, [10] 中设计了一种跟踪控制器。考虑了输入转矩饱和和外部干扰的情况,这是一种新的自适应控制方案。
这些控制方法的广泛应用促进了跟踪控制的发展。但上述大多数文献所用方法只考虑了渐近稳定性,这意味着它们在无限时间内才能实现了收敛。此外,渐近稳定性可能不会产生高精度的快速收敛性能。事实上,对于实际的移动机器人来说,在有限的时间内达到目标更为理想。
有限时间跟踪控制方法 [11] 是一种快速控制技术,可在有限时间内使控制量收敛。 [12] 中给出了非完整系统的全局有限时间跟踪控制器。J. Wang,Y. Shou,X. Liu等人 [13] [14] [15] 证明了基于有限时间Lyapunov稳定性的全局有限时间镇定定理。文 [16] 中,有限时间控制技术用于飞行姿态控制。然而,迄今为止,移动机器人的有限时间跟踪控制问题研究还不够深入 [17] [18] [19] [20] 。为了克服这些困难,在本文中,我们采用有限时间控制策略将移动机器人的误差动力学分为两个子系统。首先,为一阶系统设计了角速度的全局有限时间控制律,以稳定移动机器人的角度误差。然后,设计了有限时间前向速度滑模控制律,所设计的控制系统具有全局稳定性。通过结合有限时间控制技术和滑动模式与滑模控制方法相比,我们提高了滑模控制方法收敛速度的有效性。
2. 问题描述
本文所考虑的移动机器人由三个轮子组成。移动机器人前部的两个驱动轮由两个独立的电机驱动。另一个轮子是移动机器人后部的从动轮(见图1)。设D和r分别表示轮轴的长度和驱动轮的半径。速度VL和VR分别表示左轮和右轮的速度。控制变量v和
表示正向移动机器人的速度和角速度,其可以描述为
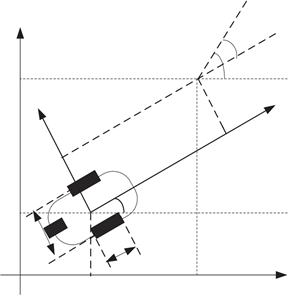
Figure 1. Schematic diagram of mobile robot tracking
图1. 移动机器人跟踪示意图
(1)
移动机器人在X-Y平面上的运动学模型如下所示:
(2)
其中
表示移动机器人质量中心的姿态坐标。
定义为笛卡尔坐标,
是航向方向和x轴之间的方位角。控制输入u为
假设不存在滑移效应,移动机器人的运动学模型满足非完整约束。对于上述假设下的移动机器人,非完整约束方程可以表示为
跟踪控制问题的目的是设计前向速度v和角速度w的规律,使得移动机器人跟踪参考轨迹。在图1中,状态向量
表示参考姿势,并且状态向量
表示实际姿势。状态向量
定义为姿态误差
根据几何关系,有效的全局坐标变换描述如下
(3)
通过取方程(3)的导数,可以获得系统的误差动态:
(4)
在本文中,移动机器人的轨迹跟踪问题是设计一种时变状态反馈律的形式
使得三个状态误差
和
在有限时间内收敛到零。
3. 跟踪控制策略设计
定理:考虑系统(4),存在控制律(5),使得系统(4)是全局一致稳定的。
(5)
取李雅普诺夫函数
然后我们沿着子系统(30)和(31)计算(42)的时间导数,我们得到
故该系统为全局渐近稳定。
4. 仿真
为了证明所提出的控制律的有效性,我们用(4)所描述的运动微分误差模型,进行了仿真,以
为期望速度,期望位置如下
仿真结果如图2~6所示。
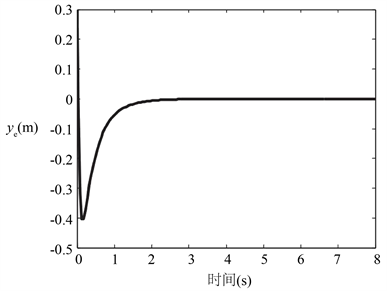
Figure 3. Longitudinal error over time
图3. 纵向误差随时间变化
5. 结论
在本研究中,提出了一种新的控制方法来实现非完整移动机器人的轨迹跟踪控制机器人。采用级联设计将移动机器人的误差模型分为两个子系统。对于一阶为了稳定角误差,本文开发了一种有限时间控制律。放宽严格限制针对移动机器人所需的角速度,采用有限时间滑模控制设计了机器人的控制律二阶子系统的前向速度,这提高了收敛速度并克服了滑模控制系统。分析了所开发控制方法的稳定性,并给出了一些充分条件:鉴于最后,仿真结果验证了该控制方法的可行性。与一般的有限时间控制方法相比,所提出的控制方法可以获得更快的收敛速度。