1. 引言
据联合国《2023年世界社会报告》显示:截至21世纪中叶,全球65岁及以上的人口数量将增加一倍以上 [1] ,世界人口老龄化现象日益严峻,已是当今时代鲜明的全球趋势所在。下肢移动功能障碍作为老年人所面临的常见问题之一,已严重影响其生活质量,因此人们对辅助提升移动能力的机器的需求变得愈发强烈 [2] [3] [4] 。轮椅 [5] [6] 和助行器 [7] [8] 等轮式辅助器具已被广泛用于下肢功能障碍患者的日常生活当中,而可折叠的电动轮椅因其优异的便携性与移动性逐渐成为解决老龄化问题的最佳解决方案。
但轮式辅助器具的越障能力实为有限 [9] [10] [11] ,往往只能在没有任何障碍与凹陷的理想路面下使用。然而在实际日常出行的情况下,难免会遇到诸如台阶,不平路面,坑陷此类障碍,如若用电动轮椅强行跨越,极易造成机体失衡而摔倒,对用户造成不可逆的伤害。鉴于此类问题,为适应各类地形的全地形轮椅被研发出来,根据越障机构的类别可区分为:轮足式 [12] 、轮履式 [13] 、变轮径式 [14] [15] 。和歌山大学设计的RT-Mover全地形轮椅 [16] 便是典型的轮足式轮椅,其每个车轮具备独立的光电传感器用于检测障碍物,并通过与车轮铰接的摆臂进行交替的仿生步态运动,从而完成越障。其控制算法过于复杂,维修成本较高,并不适用于日常出行。卢布尔雅那大学设计的Avalanche轮椅 [17] 共设有14个驱动器,除了底盘模块的轮毂电机及转向电机,每条橡胶履带也是由独立电机驱动,并且由改良切比雪夫连杆机构连接于底盘。但其整体体积较为庞大笨重,能耗较高,如若应用于日常生活,同时会对路面造成一定损坏。丰田公司设计的iBOT轮椅 [18] 于前后两个车轮间设有转轴,当面对障碍物时,转轴驱动每个轮子交替与颠簸路面接触,使轮椅完成越障。相比前两类机构,变轮径式的越障机构,主要依靠可变轮径的越障轮来辅助轮椅本体跨越障碍,具备装配简单,控制容易,成本低廉等特点,更适合于日常出行。同时,将越障机构集成于轮椅本体形成一体化结构,使轮椅变得过于笨重,反而违背了其便携性与移动性的设计初衷。而将模块化的越障辅助装置 [19] [20] ,作为附加机构装配于现有的个人移动辅助器具中反而是一种更好的选择。
因此,本文设计了一种基于电动轮椅的越障附加机构,利用可重构的轮腿机构作为附加模块铰接于轮椅本体,来解决电动轮椅的越障能力不足问题,满足用户的日常出行需求。基于准静态模型分析了电动轮椅的越障条件,并提出了越障附加机构的设计方法,最后通过仿真实验验证了附加机构对越障性能的提升效果。
2. 电动轮椅越障分析
为了深入探讨电动轮椅的越障能力,首先必须对其在日常环境中可能遇到的障碍进行细化分类。这些障碍包括但不限于台阶、坑洼、斜坡等,每种障碍都对电动轮椅的设计和功能提出了特定的要求。目前,市面上常见的电动轮椅都具备一定的驻坡能力与对坑洼路面的适应能力,但对台阶类地形的跨越能力实为有限。作为城市环境中最常见的障碍,台阶已成为电动轮椅日常出行中的最大挑战。
由于电动轮椅在越障过程中受到自身车轮半径尺寸所约束,只能通过小于车轮半径的障碍,即自身可跨越的最大高度为:
(1)
式中,h为台阶障碍物的高度,R为车轮半径,α为车轮轴心与障碍物边缘的连线与障碍物平面间的夹角。
对于高度超出车轮半径的障碍物,往往需要借助外部辅助才能安全通过。因此,为了进一步研究车体与障碍物之间的交互作用,本文基于准静态模型对电动轮椅在外部辅助下的越障行为展开了的受力分析,如图1所示。该模型是建立在轮椅匀速越障的条件下,并且忽略惯性力的影响,仅考虑重力和支撑力等静力学因素对轮椅的作用。在此模型中,电动轮椅被简化为由几个关键部件构成的刚体系统,主要包括车轮和车架。台阶被视为固定障碍物,其表面与车轮之间的接触被假设为无滑动摩擦接触。对于轮椅本体,存在以下力矩平衡方程:
(2)
式中,
为越障所需的抬升力矩,
。
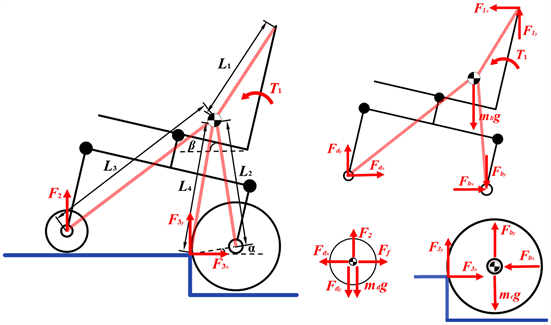
Figure 1. Force diagrams for quasi-static model
图1. 准静态模型的受力图
同时,根据图2各部件自由体受力图,可围绕各自质心建立以下力与力矩方程:
(3)
(4)
(5)
(6)
(7)
(8)
式中,
为辅助抬升力,
为台阶的反作用力。

Figure 2. Schematic representation of the FBDs used in the quasi-static analysis
图2. 准静态模型的自由体图
将公式(3)~(7)联立带入公式(8)中可得:
(9)
从该公式得知,轮椅的抬升力矩
受到
的角度所约束。在抬升的初期阶段,所需的力矩达到最大值;伴随轮椅的逐步抬升,轴心夹角
随之增大,而所需的抬升力矩逐渐减小。此外,前轮法向力
的大小也是影响越障结果的直接因素。针对上述问题,本文提出了一种创新的解决方案,即通过引入铰接式的轮腿机构间接增加轮径,以增大电动轮椅可越障的高度范围。另一方面,该设计不仅有效地改变了原有的力矩平衡关系,降低了越障过程中对前轮法向力的需求,同时具备足够的潜力以取缔他人辅助,而实现自主越障。
3. 越障附加机构结构设计
所设计的越障附加机构主要由四部分构成,分别是限位机构,离合机构,轮臂机构和储能机构,整体机构如图3所示。其中,限位机构置于离合机构的限位槽内,拔出后可调整轮腿机构间的角度。储能机构包括旋转阻尼元件和线性阻尼元件两部分,用于缓冲减震。

Figure 3. Exploded view of the obstacle-crossing add-on mechanism structure
图3. 越障附加机构结构分解图
旋转储能机构内部嵌固了用于装配的定位销,可将附加机构与轮椅本体进行组装配合,使两者构成铰接态,形成较为有效、合理的整体。整机的装配图如图4所示。

Figure 4. Assembly diagram of the obstacle-crossing add-on mechanism structure
图4. 越障附加机构结构装配图
4. 仿真实验验证
为确保所设计越障附加机构的适用性,对简化后的模型使用ADAMS软件对其越障过程进行了运动仿真。由于模型中零件数量相对较多,为了提高运行效率,将对运动结构无关或影响较小的结构件进行简化,减少模型的冗余参数,简化后的轮椅模型如图5所示。此外,针对关键构件添加约束关系、接触力、驱动力以及负载。采用冲击函数模型,且车轮与地面直接采用库仑摩擦,接触参数如表1所示。

Figure 5. Simplified wheelchair model
图5. 简化后的轮椅模型图
首先,设置轮毂电机转速为3 rad/s,以匀速通过高度为300 mm × 100 mm × 3的台阶型障碍物,以验证附加机构对轮椅本体越障性能的提升效果,仿真结果如图6所示。
整个仿真过程耗时25s,图6中两条曲线分别对应了轮椅的质心速度与位移幅值;质心速度曲线上升处对应每个车轮正处于阶梯立面的攀爬过程,所对应的质心位移呈上升曲线态;而质心速度曲线激变处分别对应每个车轮爬越过阶梯边缘处,可以看到在该段时间所对应的质心位移处于平稳态,证明此时车体已成功爬越台阶边缘,处于该台阶平面处。越障过程的运动仿真如图7所示。
仿真结果表明,装配了附加机构电动轮椅在面对台阶形障碍物时,越障过程整体顺利且稳定,同时抓地能力也表现得较为优异,并未发生较大的颠簸与倾倒现象,实验结果表明,本文所提出的越障附加机构可以显著提升电动轮椅的越障能力。

Figure 6. Displacement and velocity curves of the obstacle-crossing simulation
图6. 越障仿真速度、位移曲线

Figure 7. Schematic diagram of simulated obstacle-crossing process
图7. 仿真越障过程的示意图
5. 结论
本研究提出并实现了一种旨在解决电动轮椅越障能力不足问题的附加机构,将准静态理论分析与运动仿真实验相结合,证明了该机构在提升电动轮椅越障性能方面的有效性与泛用性。本文的研究成果不仅为电动轮椅的设计与改进提供了新的思路,也为轮椅用户提供更为自主、便捷的移动解决方案,进一步增强其生活质量和社会参与度。
NOTES
*通讯作者。