1. 引言
无人机的发展引起了当今世界各个领域的极大兴趣,无论是在军事还是在民事领域,无人机对其的发展都起到了极大的推动作用。尤其固定翼无人机,凭借其能够快速起飞,快速飞行,自主起飞和着陆等飞行优点使其在森林防火,地质勘察各方面都有广泛的应用。但是受到其自身复杂动力学特性和外界扰动的影响,使其具有高度的非线性,强耦合性以及模型参数不确定性等特点。所以,实现对固定翼UAV的准确控制,提高控制器的鲁棒性成为了一个关键而且具有挑战性的问题。
随着无人机发展的热潮,人们不断的将各种控制方法运用到无人机领域,文献 [1] - [3] 将自适应控制逆方法运用到四旋翼飞行控制中,为系统提供自适应动态矢量,并在线估计补偿四旋翼机器人的模型逆误差,从而提高轨迹跟踪的精度。文献 [4] 将自适应反步法技术应用到F-16轨迹控制技术上,基于李雅普方程的四个反馈回路的反步法方法来确保系统控制的稳定性。文献 [5] 介绍设计了两种状态观测器SMO (sliding-mode observer)和NESO (nonlinear extended state observer)在固定翼飞行器平台上将PD控制器用于观测器的状态反馈信号输出,来分析固定翼机的俯仰,偏航,翻滚三个运动状态。文献 [6] 设计了一款反步法滑模控制器,提高控制器的鲁棒性,在通过两阶滑模控制来消除标准一阶滑模带来的自然抖振。文献 [7] - [9] 针对四旋翼飞行器设计了自适应滑模控制器,利用自适应动态变量来抵消系统的扰动误差,实现系统的稳定性。
本文针对固定翼无人机的轨迹跟踪问题,设计了一款滑模控制器来减小系统的跟踪误差,提高系统的鲁棒性。在固定翼数学模型建立的基础上,分析固定翼无人机的轨迹跟踪模型,利用滑模控制来使系统达到稳定跟踪的目的。并通过Lyapunov来证明系统的稳定性,最后在MATLAB下进行固定翼轨迹跟踪控制的仿真模拟。
2. 固定翼动力学模型
假设在惯性空间里,地球表面是水平并且静止的,并假设固定翼无人机是均匀的刚体,质量和其分布不会发生变化,为无人机的建模选择合适的地面坐标系和体坐标系,坐标系建立如图1。
以固定翼无人机坐标系为基础,建立固定翼无人机的数学模型,首先由牛顿-欧拉的刚体动力学方程可以得到机体沿x,y,z轴的线速度状态方程
 (1)
(1)
 (2)
(2)
 (3)
(3)
和沿x,y,z方向的力矩方程
 (4)
(4)
 (5)
(5)
 (6)
(6)
其中u,v,w是机体线速度,p,q,r是机体的角速度, ,
, ,
, 是姿态角,
是姿态角, (Pa)是动态压强,
(Pa)是动态压强, ,
, ,
, 是动力强度因数,
是动力强度因数, 是螺旋桨转动角速度,
是螺旋桨转动角速度, ,
, ,
, ,
, 和
和 是飞机和动力系统惯性力矩因数,
是飞机和动力系统惯性力矩因数, ,
, ,
, 是无量纲力矩因数 [10] 。
是无量纲力矩因数 [10] 。 ,
, ,
, 动力强度因数关系如下:
动力强度因数关系如下:
 (7)
(7)
 (8)
(8)
 (9)
(9)
 ,
, 是飞机的攻角和侧滑角,
是飞机的攻角和侧滑角, ,
, ,
, 是无量纲力矩因数关系表示如下:
是无量纲力矩因数关系表示如下:
 (10)
(10)
 (11)
(11)
 (12)
(12)
 ,
, ,
, ,
, 副翼,升降,油门,尾翼的控制输入。
副翼,升降,油门,尾翼的控制输入。
将固定翼机器人进行坐标转换,可得到地面坐标系下的角速度和速度方程如下:
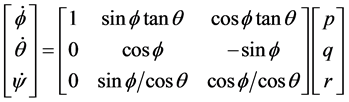 (13)
(13)
 (14)
(14)
其中 代表机体在地面坐标系下的滚转角、俯仰角和偏航角,
代表机体在地面坐标系下的滚转角、俯仰角和偏航角, 代表机体在地面坐标系下的位置。
代表机体在地面坐标系下的位置。
3. 飞行器轨迹跟踪模型
UAV轨迹跟踪控制的目的就是控制固定翼机在反馈控制下来跟踪一个参考的轨迹,若 代表现在的位置,
代表现在的位置, 为现在时刻航向角,
为现在时刻航向角, 为航向转速率,V代表飞行的速度,让
为航向转速率,V代表飞行的速度,让 代表参考轨迹点,
代表参考轨迹点, 代表参考速度,
代表参考速度, 代表参考航向转速率,飞机的轨迹参考模型如图2。
代表参考航向转速率,飞机的轨迹参考模型如图2。
飞机的动态模型也可以表示为
 (15)
(15)
 (16)
(16)
同时飞机参考轨迹满足如下的动力学方程
 (17)
(17)
 (18)
(18)
由此给出固定翼的轨迹跟踪结构图如图3:
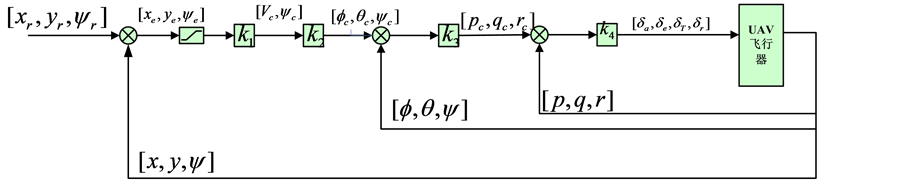
Figure 3. Fixed-wing trajectory tracking structure chart
图3. 固定翼轨迹跟踪结构图
其中图中的 是一个规划的参考轨迹控制率,在每一个控制过程中将实时采集的实际位置和角度信息与参考的轨迹进行补偿计算出正确的速度命令和偏航命令控制飞机按照参考的轨迹进行飞行。
是一个规划的参考轨迹控制率,在每一个控制过程中将实时采集的实际位置和角度信息与参考的轨迹进行补偿计算出正确的速度命令和偏航命令控制飞机按照参考的轨迹进行飞行。
设代表横向位置误差, 代表纵向位置误差,
代表纵向位置误差, 代表偏航角误差,然后我们可以将其关系表示成如下方程:
代表偏航角误差,然后我们可以将其关系表示成如下方程:
 (19)
(19)
对上述误差进行微分求导可得如下误差导数:
 (20)
(20)
在控制系统中我们假设 ,
, 是控制器输入,但是实际上的输入是
是控制器输入,但是实际上的输入是 ,
, ,通过级联控制策略我们可以采用如下控制率:
,通过级联控制策略我们可以采用如下控制率:
 (21)
(21)
 (22)
(22)
其中 ,
, [11] 。
[11] 。
轨迹跟踪控制的目标是通过找到可行的控制输入 ,
, 使得当t趋近于零时,
使得当t趋近于零时, ,使轨迹误差和偏航误差趋近于零或者趋近于某个较小的值。
,使轨迹误差和偏航误差趋近于零或者趋近于某个较小的值。
4. 滑模变结构控制
本文使用的是趋近律方法来削弱系统的抖振,采用的指数趋近律 设计的滑模控制系统,通过调节
设计的滑模控制系统,通过调节 和
和 对滑动模态到达的动态品质进行保证,同时又对高频抖振进行了削弱,但是
对滑动模态到达的动态品质进行保证,同时又对高频抖振进行了削弱,但是 的选取又不能太大,太大会加大抖振现象。
的选取又不能太大,太大会加大抖振现象。
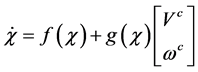
对于非线性仿射控制系统:
 (23)
(23)
其中 分别为状态和控制向量且
分别为状态和控制向量且 ,
, ,
, 连续可微且
连续可微且 可逆。
可逆。
若设 ,
, ,且
,且 和
和 满足:
满足:
 (24)
(24)
 (25)
(25)
则轨迹误差 与
与 的关系可以转化为如下:
的关系可以转化为如下:
 (26)
(26)
问题转化为使 稳定的输入
稳定的输入 ,设计控制法则
,设计控制法则
 (27)
(27)
设计滑模变结构控制器首先要定义滑模面函数
 (28)
(28)
对滑模面函数进行求导可得
 (29)
(29)
在公式(26)中的 ,那我们令
,那我们令 ,则公式(26)可以写成:
,则公式(26)可以写成:
 (30)
(30)
将(30)带入(29)可得:
 (31)
(31)
其中 ,将
,将 带入(27)得到
带入(27)得到
 (32)
(32)
在分析控制法则 时要对系统到达滑模面的运动情况进行讨论即到达滑模面之前的运动(
时要对系统到达滑模面的运动情况进行讨论即到达滑模面之前的运动( )和滑模面上的运动(
)和滑模面上的运动( ):
):
① 当系统到达滑模面前,采用等速趋近律的方法,其表达式为:
 (33)
(33)
式中 是指数趋近项,其解为
是指数趋近项,其解为 。指数项
。指数项 能保证当
能保证当 较大时,系统状态能以较大的速度趋近于滑动模态。指数趋近中,趋近速度从一个较大的值逐步减小到零,不仅缩短了趋近时间,而且使运动点到达切换面时的速度很小。单纯的指数趋近,运动点逼近切换面是一个渐近的过程不能保证有限的时间内到达,切换面上也就不存在滑动模态了,所以要增加一个等速趋近项
较大时,系统状态能以较大的速度趋近于滑动模态。指数趋近中,趋近速度从一个较大的值逐步减小到零,不仅缩短了趋近时间,而且使运动点到达切换面时的速度很小。单纯的指数趋近,运动点逼近切换面是一个渐近的过程不能保证有限的时间内到达,切换面上也就不存在滑动模态了,所以要增加一个等速趋近项 ,使当s接近于零时,趋近速度是
,使当s接近于零时,趋近速度是 而不是零,也可以保证有限时间到达。在指数趋近律中,为了保证快速趋近的同时削弱抖振,应在增大k的同时减小
而不是零,也可以保证有限时间到达。在指数趋近律中,为了保证快速趋近的同时削弱抖振,应在增大k的同时减小 [12] 。
[12] 。
② 当系统到达滑模面后,系统的状态轨迹仍要保持在滑模面上滑动,此时有滑模面 ,则
,则 。
。
设计滑模控制率,可以证明能够实现闭环系统的稳定控制:
 (34)
(34)
设计如上的控制率,使系统状态在有限的时间内到达滑模面,并使得状态误差收敛于零,保证输出跟踪期望值。
构建Lyapunov函数并证明其渐进稳定性:
其中 ,且
,且 和
和 同号,由此可知
同号,由此可知 ,因此,系统状态能在有限时间内到达滑模面
,因此,系统状态能在有限时间内到达滑模面 ,实现系统输出渐进跟踪期望值。
,实现系统输出渐进跟踪期望值。
5. 仿真结果
上节介绍完控制算法后,将在本节根据实际使用的固定翼无人机的一些具体参数给出在matlab中实现的固定翼轨迹跟踪控制的仿真结果。其中飞行器的一些基本的参数信息给出如表1。
仿真结果主要是展示了一段飞机的轨迹跟踪情况,其中跟踪是以飞机达到飞行平衡时的状态为起点。在飞行仿真试验中,一般都是选择飞机的平衡状态作为研究的起点,而飞机平衡状态主要是由配平方法得到的 [13] 。而飞机的平衡状态定义为在一定给定的约束状态下,飞机的线速度和角速度分量为零或者固定值,而加速度为零的一种状态,求取平衡状态的方法是一个在多目标多约束的寻优问题,即配平就是数值寻优问题 [14] 。
仿真中找到平衡点状态后(下图中的起点位置),进行一段轨迹跟踪的仿真,如图4~8虚线代表飞机的参考飞行轨迹及飞行状态,实线是固定翼飞机的实际飞行的轨迹及飞行状态。

Table 1. Basic parameters chart of aircraft
表1. 飞行器基本参数表

Figure 4. Flight trajectory tracking 3d space diagram
图4. 飞行轨迹跟踪的3维立体空间图
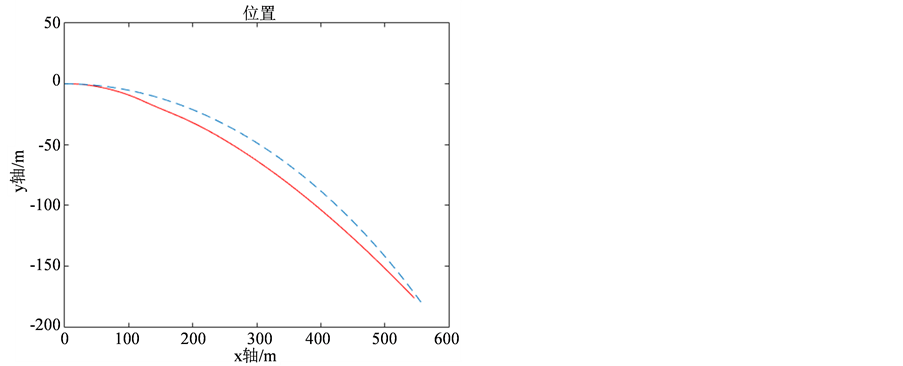
Figure 5. Ground projection position tracking diagram
图5. 地面投影位置跟踪图
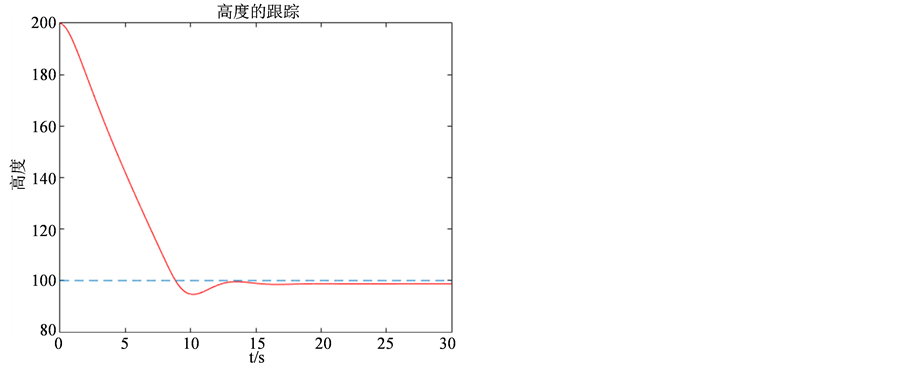
Figure 6. Flight altitude tracking diagram
图6. 飞行高度跟踪图

Figure 7. Y-axis position tracking diagram
图7. Y轴位置跟踪图

Figure 8. X-axis position tracking diagram
图8. X轴位置跟踪图
以上是给出了固定翼无人机飞行的一段轨迹跟踪状况图,虽然在飞机刚开始的时候跟踪性能不太稳定,但是在跟踪到一定时间后位置和高度的误差较小,飞行中y轴位置的跟踪误差趋近于零,虽然x轴的跟踪存在一定的误差但是随着时间的加长其最后的误差能够减小到一个固定的值甚至趋近于零,由以上的分析可以看出该算法能够保证固定翼无人机的稳定飞行,并且使得飞行中具有较好的跟踪效果。
6. 结论
本文是在固定翼无人机非线性动态模型的基础上,将滑模控制算法应用到固定翼无人机的轨迹跟踪控制中。设计了一款基于指数趋近律的滑模控制器。利用指数趋近的滑模控制消除系统的抖振现象同时提高系统跟踪的准确性和稳定性。MATLAB仿真结果表明了该控制理论的可行性。