1. 引言
并联机构具有结构稳定、刚度大、承载能力强、精度高、动力性能好等特点,在包装机械、精密制造及微创医疗等领域得到了广泛的应用 [1] [2] 。其中三自由度平面并联机构,既是研究空间并联机构的基础,又由于其结构简单、对称,制造成本低,便于控制等特点,日益受到人们的重视,在机器人应用领域颇具特色及应用前景 [2] 。该类机构的动力学建模与分析,对于其驱动电机的选择及控制、动静态强度的计算与校核、机构动力学性能的改善与优化等都十分重要。尽管目前已相继提出具有有不同特点的动力学建模与分析方法 [1] - [3] ,但这些方法及相应的软件多数仅局限于单一能域系统(例如,机械系统)的局部动力学。键合图方法 [4] 在处理多种能量形式并存系统(例如,机、电、液、气并存系统)的全局动力学问题方面优势明显,在实际工程中得到了日益广泛的应用 [4] - [7] 。但是,在处理复杂多体系统动力学建模与分析问题时,其标量键合图模型十分繁杂,实际应用非常不便。向量键合图法 [8] 正是在这一背景下提出的,除具备标量键合图法的特点及优势外,向量键合图每根键上所对应的势变量和流变量皆为向量形式,这使其包含信息量较大,可以用更加紧凑、简明的图形方式,表述平面并联机构的运动学及动力学特征。在该类机构的计算机辅助动力学分析中,力学概念清晰,应用更加便利。
3-PPR型平面并联机构是一种同时含有多个转动铰和移动铰的多自由度平面多体系统,相比全部为转动铰或含有少量移动铰的平面三自由度并联机构,其研究工作还远不够深入 [2] 。由于该类机构的拓扑结构及机构构件间的运动约束关系,应用向量键合图法对其进行动力学建模与分析,尚有若干理论及应用方面的问题需要解决。例如:如何建立该类平面并联机构的向量键合图模型;如何消除其向量键合图模型中贮能元件的微分因果关系,解决其给计算机辅助动力学建模所带来的代数困难,使其具有可计算性等,相关的文献报道甚少。本文基于向量键合图的基本概念,建立了具有可计算性的3-PPR型平面并联机构系统的向量键合图模型,实现了其计算机自动建模与动力学分析,有效地解决了上述问题。
2. 3-PPR型平面并联机构向量键合图模型
图1所示3-PPR型平面并联机构,由运动平台、固定平台和三个独立运动的支链所组成。该机构具有三个自由度,每个运动支链包含两个移动副(P)和一个转动副(R),通过与机架相连的三个移动副加以驱
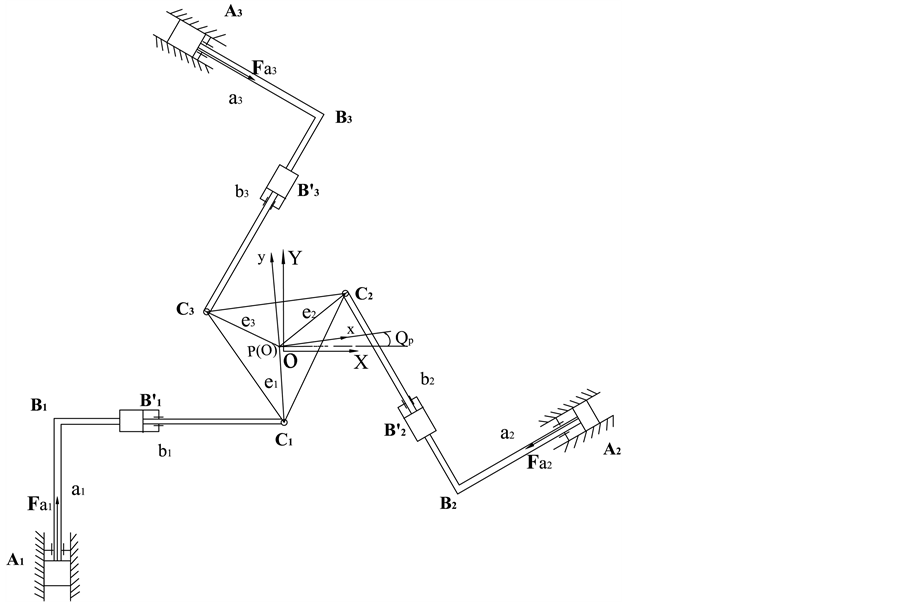
Figure 1. The diagram of 3-PPR planar parallel mechanism
图1. 3-PPR型平面并联机构简图
动。机构运动到任意位置时,杆件AiBi长为ai,质量为 ,杆件BiCi长为bi,杆件
,杆件BiCi长为bi,杆件 质量为
质量为 。动平台C
1 C
2 C
3为正三角形,其边长为c,中心P与其三个顶点的距离为e,其质量为
。动平台C
1 C
2 C
3为正三角形,其边长为c,中心P与其三个顶点的距离为e,其质量为 ,转动惯量为
,转动惯量为 。机构位于初始位置时,杆件AiBi长为a,BiCi长为b,固定坐标系XOY的原点O与动平台中心P重合,构件A1B1与OY轴重合,构件A2B2、A3B3依次逆时针转过120˚、240˚。设动坐标系xoy固结于动平台上,其坐标原点o位于动平台中心P处,在固定坐标系XOY中的坐标为
。机构位于初始位置时,杆件AiBi长为a,BiCi长为b,固定坐标系XOY的原点O与动平台中心P重合,构件A1B1与OY轴重合,构件A2B2、A3B3依次逆时针转过120˚、240˚。设动坐标系xoy固结于动平台上,其坐标原点o位于动平台中心P处,在固定坐标系XOY中的坐标为 ,x轴相对于X轴的夹角即动平台的姿态角为Qp。
,x轴相对于X轴的夹角即动平台的姿态角为Qp。
该机构是由三条支链AiBiCi 及动平台C
1 C
2 C
3所构成,每条支链包含两个刚体、两个移动副及一个转动副。
及动平台C
1 C
2 C
3所构成,每条支链包含两个刚体、两个移动副及一个转动副。
对于支链i,杆件AiBi做平动,由运动分析得:
 (1)
(1)
 (2)
(2)
式中, ,为构件AiBi的质心速度矢量。杆件AiBi两端铰接点的速度矢分别为
,为构件AiBi的质心速度矢量。杆件AiBi两端铰接点的速度矢分别为 ,
, 。
。
式(1),(2)所表示的运动约束关系可以用图2所示的向量键合图表示,为表示出移动副Ai、处的约束反力及作用在构件AiBi上的驱动力,图2所示的向量键合图经过了必要的扩展。其中,Se1表示构件AiBi
移动副Ai、处受到的约束反力,垂直于AiBi, 。
。 ,表示作用在构件AiBi上的驱动力,方向如图1所示。
,表示作用在构件AiBi上的驱动力,方向如图1所示。 ,
, 。
。

Figure 2. The vector bond graph of component AiBi
图2. 构件AiBi的向量键合图
由机构的运动分析 [2] 知,构件 也做平动,其向量键合图如图3所示。图3中,
也做平动,其向量键合图如图3所示。图3中, 为构件
为构件 质心的速度矢量。
质心的速度矢量。 ,
, 。
。
将构件AiBi的向量键合图、构件 的向量键合图及移动铰
的向量键合图及移动铰 的向量键合图 [8] [9] 组合起来,便可以建立该平面并联机构支链i
的向量键合图 [8] [9] 组合起来,便可以建立该平面并联机构支链i 的向量键合图,如图4所示。其中,
的向量键合图,如图4所示。其中, 表示移动铰
表示移动铰 的约束反力(i = 1, 2, 3)。
的约束反力(i = 1, 2, 3)。
动平台C
1 C
2 C
3为做平面运动的刚体,如图5所示。由文献 [3] 得其质心速度矢与三个铰接点的速度矢间的关系,如式(3)所示。
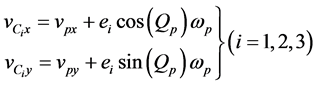 (3)
(3)
式中,质心速度矢 ,各铰接点的速度矢分别为
,各铰接点的速度矢分别为
 ,
, 表示动平台的角速度。式(3)所示的运动关系可以用图6所示的向量键合图来表示。其中,
表示动平台的角速度。式(3)所示的运动关系可以用图6所示的向量键合图来表示。其中, ,已知力势源向量
,已知力势源向量 ,未知力势源向量
,未知力势源向量 ,
, ,
, ,分别表示运动副C1、C2、C3处的约束反力向量。各转换器MTF的模数可由式(3)直接求得。
,分别表示运动副C1、C2、C3处的约束反力向量。各转换器MTF的模数可由式(3)直接求得。
该机构是由三个支链通过三个旋转铰与动平台相连接,将图4所示的三个支链的向量键合图、旋转铰向量键合图 [8] 及动平台的向量键合图组合起来,便可以建立3-PPR型平面并联机构向量键合图,如图7所示。
由文献 [4] [9] 知,任何系统可由源场、贮能场、耗散场及结型结构所构成。其中,耗散场由阻性元件R构成,贮能场由容性元件C及惯性元件I构成,源场由势源Se及流源Sf构成,结型结构由转换器TF (MTF)、回转器GY (MGY)、0-结、1-结所构成。在此基础上,文献 [9] 推导出更加简明实用的系统驱动力矩(驱动力)及运动副约束反力的统一方程,为该类问题的计算机自动建模与动力学分析提供了程式化的方法。但是,在建立3-PPR型平面并联机构机构向量键合图模型的过程中,构件间的旋转铰和移动铰约束使其向量键合图模型的多数惯性元件I具有微分因果关系。另外,动平台质心速度矢量、铰接点速度矢量及角速度的非线性关系,使机构向量键合图具有较复杂的非线性结型结构。由文献 [4] 知,具有微分因果关系的惯性元件I所对应的能量变量是非独立,需要用具有积分因果关系的惯性元件I所对应的能量变量(系统状态变量)来表示,这一过程较复杂且不规则,用现有的方法实现机构自动建模及动力学分析十分困难 [4] [9] 。
为此,将各运动副约束反力向量 (移动铰A1)、
(移动铰A1)、 (移动铰
(移动铰 )、
)、 (旋转铰C1)、
(旋转铰C1)、 (移动铰A2)、
(移动铰A2)、 (移动铰
(移动铰 )、
)、 (旋转铰C2)、
(旋转铰C2)、 (移动铰A3)、
(移动铰A3)、 (移动铰
(移动铰 )、
)、 (旋转铰C3)作为未知势源向量添加在该机构向量键合图模型相应的0-结处,完全消除了其微分因果关系,使所有惯
(旋转铰C3)作为未知势源向量添加在该机构向量键合图模型相应的0-结处,完全消除了其微分因果关系,使所有惯

Figure 3. The vector bond graph of component 
图3. 构件 的向量键合图
的向量键合图

Figure 4. The vector bond graph of moving chain i
图4. 支链i的向量键合图
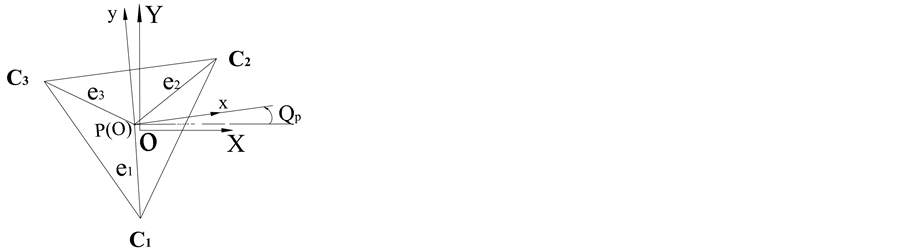
Figure 5. Moving platform C
1 C
2 C
3
图5. 动平台C
1 C
2 C
3
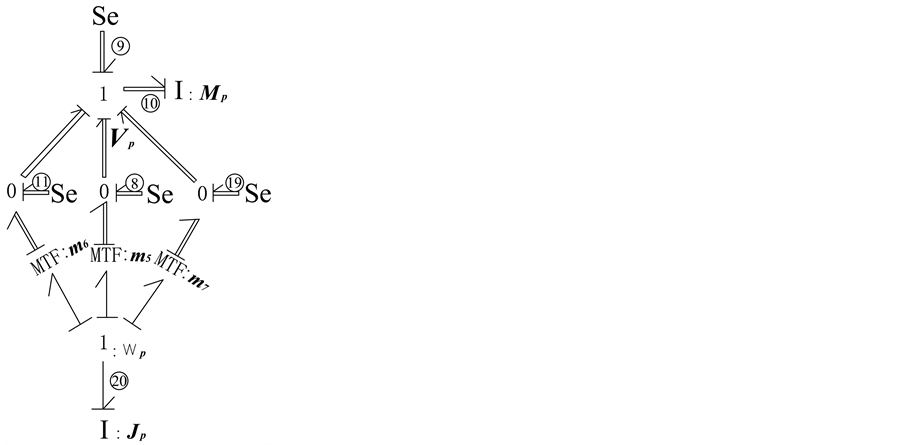
Figure 6. The vector bond graph of moving platform
图6. 动平台向量键合图
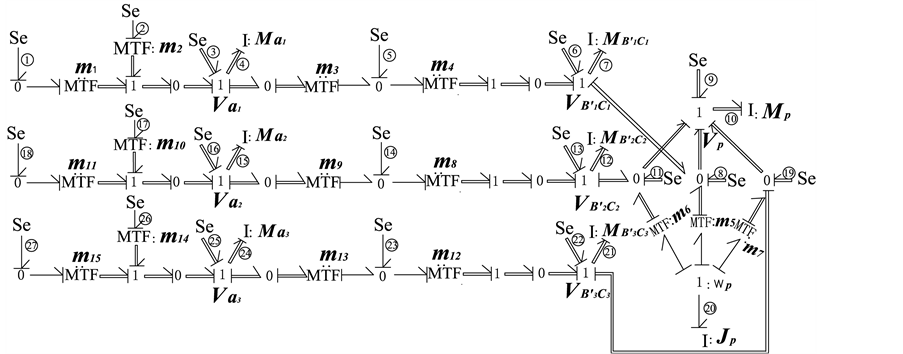
Figure 7. The vector bond graph of 3-PPR planar parallel mechanism
图7. 3-PPR型平面并联机构向量键合图
性元件I皆具有积分因果关系,如图7所示。经过如此处理后,可以直接应用文献 [9] 所述方法进行机构的计算机辅助动力学建模与分析计算。
3. 实际算例
图1所示3-PPR型平面并联机构,各构件的长度 、
、 、
、 随时间的变化函数如下:
随时间的变化函数如下: m,
m, m,
m,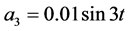 m。各杆件质量分别为:
m。各杆件质量分别为: ,
, 。动平台的质量
。动平台的质量 ;动平台转动惯量
;动平台转动惯量 ,中心点P与顶角的距离为
,中心点P与顶角的距离为 。机构处于初始位置时,杆件AiBi
。机构处于初始位置时,杆件AiBi 长
长 。
。
由文献 [9] 所述方法知,图7所示系统的状态变量向量
 ,
,
相应的共能量变量向量
 。
。
系统已知势源向量
 ,
,
未知势源向量
 。
。
该算例忽略了系统的阻尼,则系统耗散场的输入、输出向量 、
、 皆为零向量。
皆为零向量。
将机构的结构参数、向量键合图的结型结构矩阵 [9] 、已知势源向量 、系统的状态变量
、系统的状态变量 及其导数
及其导数 代入到以文献 [9] 所述算法为基础所编制的软件中去,可以直接确定该平面并联机构的驱动力及运动副约束反力,部分结果曲线如图8~11。其中,图8中驱动力
代入到以文献 [9] 所述算法为基础所编制的软件中去,可以直接确定该平面并联机构的驱动力及运动副约束反力,部分结果曲线如图8~11。其中,图8中驱动力 为负值,表示与图1所示方向相反。
为负值,表示与图1所示方向相反。
用文献 [3] 所述的牛顿-欧拉动力学方法对该例进行计算验证,所得结果与本文方法是一致的。由此可见,本文所述方法的准确性是可靠的。由于其验证过程十分繁琐,这也进一步体现了本文所述方法的优势,在此不再赘述。
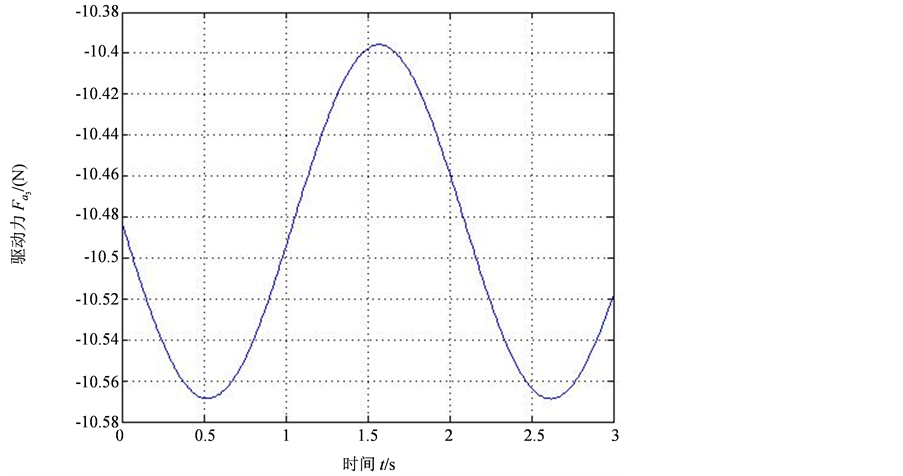
Figure 8. The driving force of component A3B3
图8. 作用在构件A3B3上的驱动力
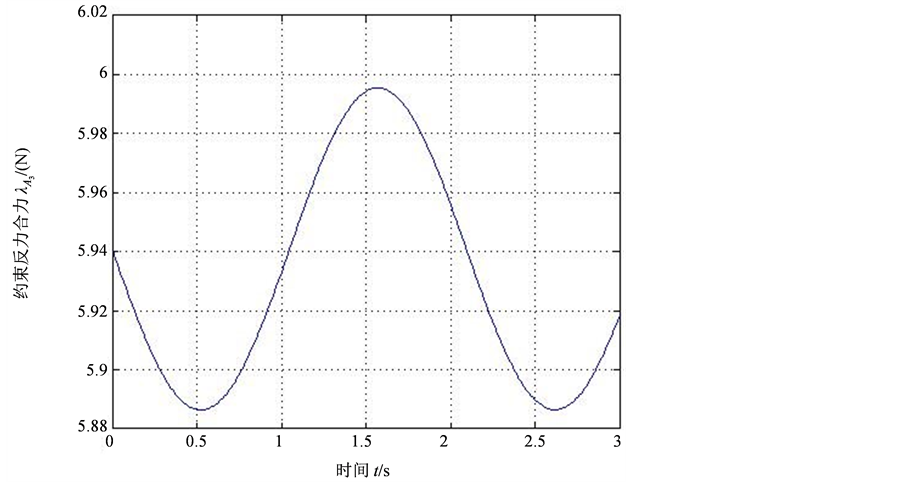
Figure 9. The resultant constraint force of slip joint A3
图9. 移动副A3的约束反力合力
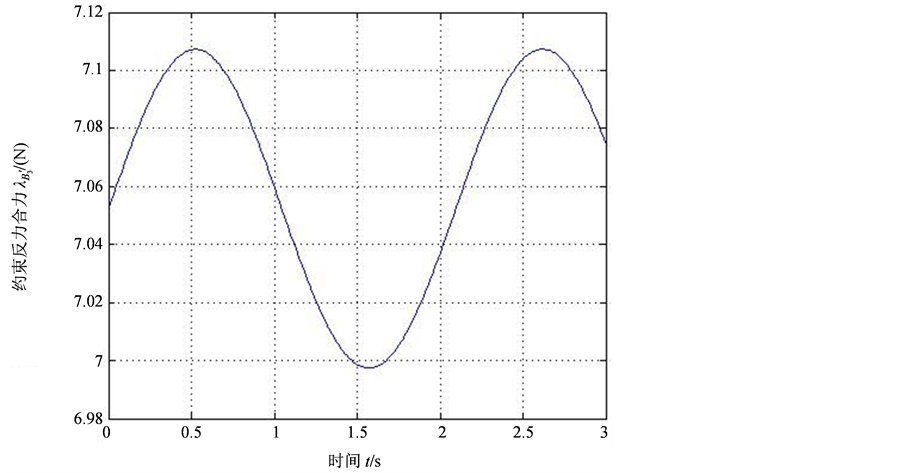
Figure 10. The resultant constraint force of slip joint 
图10. 移动副 约束反力合力
约束反力合力
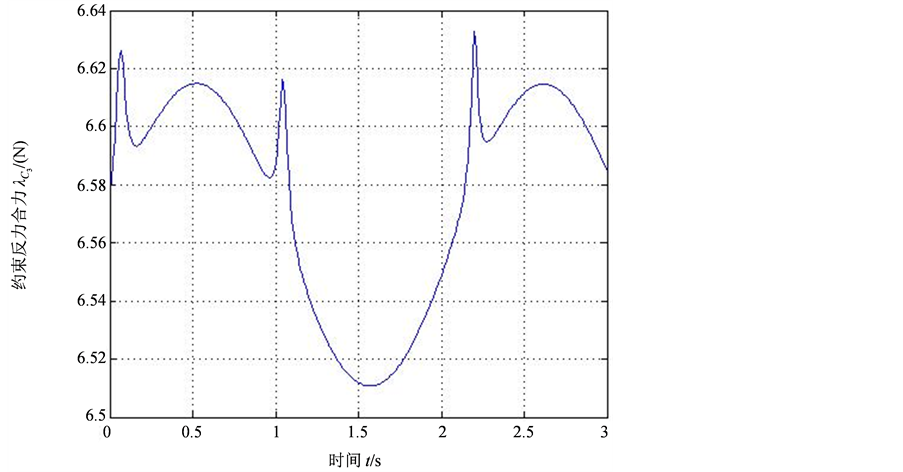
Figure 11. The resultant constraint force of revolute joint 
图11. 转动铰 点的约束反力合力
点的约束反力合力
4. 结论
本文基于一般平面运动构件、移动铰及旋转铰的向量键合图所构建的3-PPR型平面并联机构向量键合图模型,能以简明、紧凑的图形方式直观表达机构构件的速度矢量及角速度间的关系,同时也表达了作用在机构构件上力矢量的关系、力矢量与力矩的关系,实现了图形描述、运动学描述及力学描述的统一。所给出的向量键合图增广方法,有效地消除了机构向量键合图中的微分因果关系,实现了建模过程中的代数解耦,解决了其给机构动力学建模与分析所带来的代数困难。应用现有的算法,以程式化的方式实现了3-PPR型平面并联机构计算机辅助动力学建模与分析,一定程度上提高了该类工作的计算效率及可靠性。本文工作既是对多自由度平面并联机构动力学分析方法的有益补充,也是对向量键合图理论及应用必要的扩展。
基金项目
国家自然科学基金项目(No. 51175272)。