1. 引言
混合式VTOL UAV是一种垂直起降(VTOL, Vertical Take-Off and Landing)无人机,它是一种集直升机和固定翼飞机的优点于一身的飞行器,它既可以零速度垂直起飞和着陆,又可以进行悬停,又能以固定翼飞机的方式进行高速水平飞行,并具有较大的航程,是一种很有发展前途的飞行器 [1] 。这种飞行器结构复杂、多输入、多输出、非线性,对其控制起来非常困难。目前国内外对VTOL无人机的研究主要集中在倾转旋翼式无人机 [2] 、涵道风扇式无人机 [3] 、T-wing式 [4] 和Tailsitter式 [5] 等,而混合式VTOL UAV则是一种非常新颖的飞行器,国内外对其研究较少。
本文首先建立了它的动力学模型,然后对模型方程进行分析,确定输入和输出及状态量,并设计了一种PID闭环控制策略使系统能够输出稳定,最后通过Simulink对其进行了仿真验证了控制系统的有效性。
2. 混合式VTOL UAV飞行机理分析
混合式VTOL UAV是简单的将四旋翼和固定翼无人机结合在一起,在起飞阶段四个旋翼处于工作状态,固定翼螺旋桨转速为零;待起飞后固定翼螺旋桨开始旋转,待机体到达一定速度后四旋翼系统停止工作,此时处于固定翼工作模式;降落阶段固定翼螺旋桨速度逐渐降低最后速度为零,四旋翼系统开始工作。此外,当飞行器的负载较重的时候,它还可以像固定翼飞行器那样的方式进行起飞和降落。混合式VTOL UAV具有结构简单、实现容易、操控方便等特点,但是模型存在过渡阶段,过渡转换复杂 [6] 。并且在固定翼工作模式下,四旋翼系统处于非工作状态,这对飞行器而言是额外的负荷,并且造成了气流扰动,增加了阻力,降低了效率。
3. 混合式VTOL UAV的动力学模型
为了建立混合式VTOL UAV的动力学模型方程,首先做出如下假设:
1) 飞行器为一刚体,忽略旋翼的挥舞运动;
2) 飞行器关于xz平面对称,并且四个旋翼在同一水平面上;
3) 固定翼螺旋桨与yz平面平行(图1)。
首先定义两个坐标系,机体坐标系O (xyz)和惯性坐标系E (pxpypz),通过坐标变换可以得出机体坐标系和惯性坐标系的一般转换矩阵为
 (1)
(1)
 (2)
(2)
3.1. 定义机体坐标系下的线速度为Vp = [u v w],那么惯性坐标系下的动力学方程可以表示为
 (3)
(3)
3.2. 定义机体坐标系下的角速度为ω = [p q r],则惯性坐标系下姿态方程可以表示为
 (4)
(4)
3.3. 建立力和力矩方程
根据飞行力学和牛顿欧拉方程可知飞行器的动力学方程可以表示为
 (5)
(5)
其中m为飞行器的质量,v为飞行器在机体坐标系下的线速度 ,F为飞行器的受力总和,T为飞行器的力矩总和,其中Ω×可以表示为
,F为飞行器的受力总和,T为飞行器的力矩总和,其中Ω×可以表示为
 (6)
(6)
I为惯性矩,由于飞行器为对称模型,因此可以表示为
 (7)
(7)
综合力矩分析可得机体坐标系的转动动力学方程为
 (8)
(8)
其中:


综合力学分析可以得到机体坐标系下平移动力学方程为
 (9)
(9)
其中: 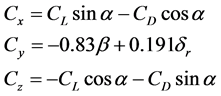

 ,
, 为空气密度,攻角
为空气密度,攻角 ,侧滑角
,侧滑角 ,
,
 ,
, 分别为飞行器的副翼偏角,水平尾翼偏角,方向舵偏角,
分别为飞行器的副翼偏角,水平尾翼偏角,方向舵偏角,
 为5个电机的转速。
为5个电机的转速。
式(3)、(4)、(8)、(9)为总的动力学方程,从方程可以看出该系统共有[n1 n2 n3 n4 n5 δa δe δr] 8个控制量和[u v w p q r Φ θ Ψ x y z]共12个状态量,是一个多输入、多输出、强耦合的非线性系统。此模型在假设与简化的基础上建立,具有简单、直观、易于分析等特点,后续将根据此模型进行仿真控制分析。
4. 分析仿真
4.1. 仿真过程
混合式VTOL UAV模型非常复杂,对其控制起来较为困难,这里采用PID的方法对其进行仿真。混合式VTOL UAV存在转换过渡阶段,需要分别设计不同的PID控制器来控制飞行器的飞行行为。
PID控制器的输入信号是设定参考值和被控对象输出值的误差信号e(t),传统的PID直接采集没有经过任何处理的误差信号,这样会引起超调,因为被控对象的输出可能是零。本文从自抗扰控制技术(ADRC)得到启发,在PID控制器的输入端设计了跟踪微分器(TD)环节,依此来安排过渡过程 [6] ,这样误差信号首先进入跟踪微分器(TD),经过处理后再进入PID控制器。如图2所示即为增加TD环节后的PID控制流程图,e(t)为最原始的误差信号,e1(t)为经过TD处理后的误差信号,然后再将e1(t)送入到PID控制器当中。
公式(10)即为设计的跟踪微分器,e为最原始的误差信号,e1为经过跟踪微分器处理过的误差信号,也就是PID控制器的输入信号。图3为一个方波信号经过跟踪微分器处理后的显示效果,从图中可以看出方波信号经过TD处理后过渡阶段变得平滑 [7] 。

 (10)
(10)
为了构成PID闭环控制回路,取参考输入值与系统输出返回值的误差信号作为PID控制器的输入信
号 [8] 。对于四旋翼系统,参考输入值取xyz三个方向的速度值和偏航角,即 ,
, ;固定翼系统取姿态角和机体速度,即
;固定翼系统取姿态角和机体速度,即 ,
, ,
, 和
和 分别为四旋翼系统和固定翼系统的参考输入值,
分别为四旋翼系统和固定翼系统的参考输入值, 和
和 系统的输出返回值 [9] 。
系统的输出返回值 [9] 。
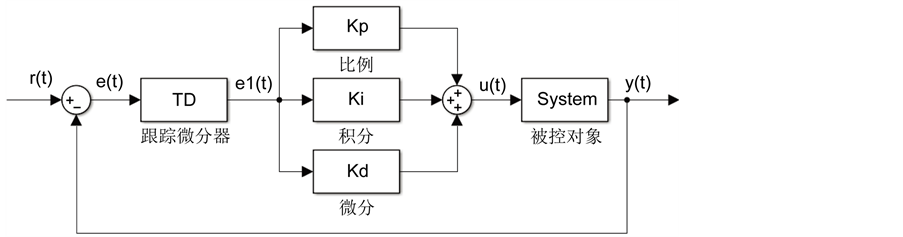
Figure 2. Chart: PID control flow with TD
图2. 增加TD环节的PID控制流程图
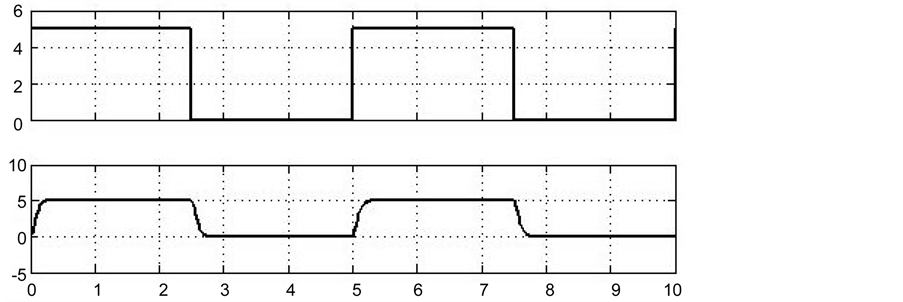
Figure 3. Curve: signal processed by the tracking differentiator
图3. 经过跟踪微分器处理过的信号
4.2. 仿真结果
根据上面建立simulink仿真模型,并取表1中的信息作为仿真参数,同时设定四旋翼和固定翼系统
的参考输入值分别为 ,
, 。
。
不断调节PID的参数,可以得到当四旋翼的PID的参数P = 100,I = 1,D = 5时和固定翼的P = 10,I = 0.1,D = 1时最终使系统的输出值趋于稳定。图4~8分别为攻角 、侧滑角
、侧滑角 、飞行器位置xyz、机体速度Vt和姿态角的仿真结果曲线图,所有图的横坐标轴是时间,单位是s,攻角
、飞行器位置xyz、机体速度Vt和姿态角的仿真结果曲线图,所有图的横坐标轴是时间,单位是s,攻角 、侧滑角
、侧滑角 和姿态角的纵坐标轴单位是弧度制,飞行器位置xyz纵坐标轴单位是m,速度单位是m/s [10] [11] 。
和姿态角的纵坐标轴单位是弧度制,飞行器位置xyz纵坐标轴单位是m,速度单位是m/s [10] [11] 。

Table 1. System resulting data of standard experiment
表1. 混合式VTOL UAV仿真参数列表
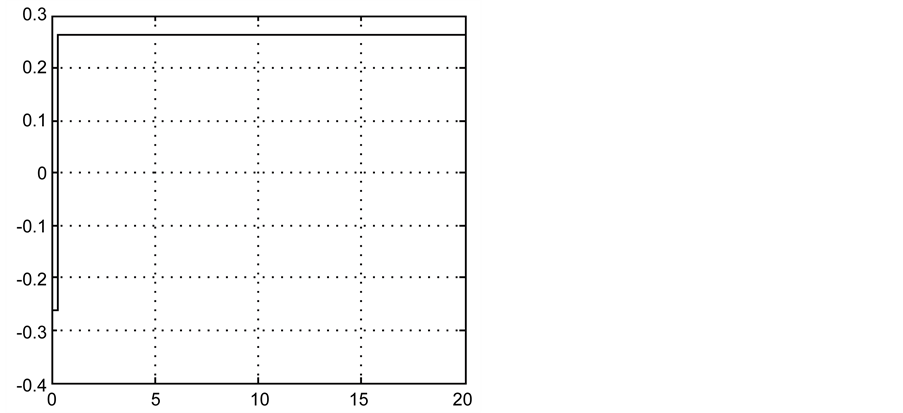
Figure 4. Curve: Response time curse of α
图4. 攻角α随时间响应曲线
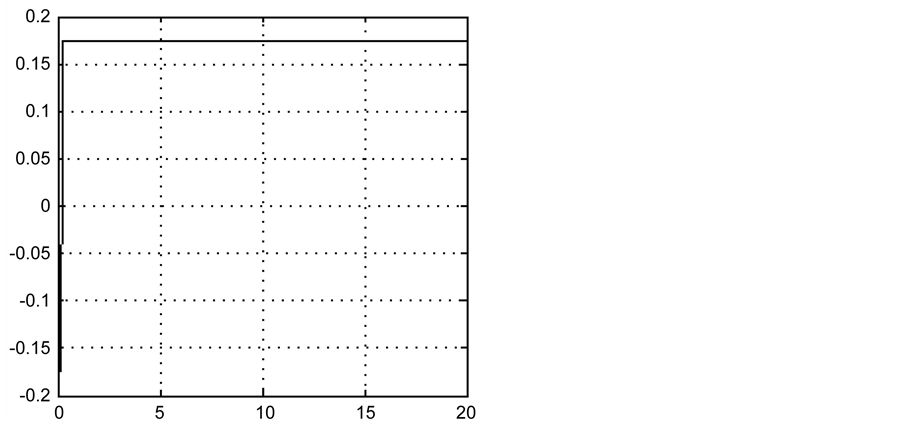
Figure 5. Curve: Response time curve of β
图5. 侧滑角β随时间响应曲线
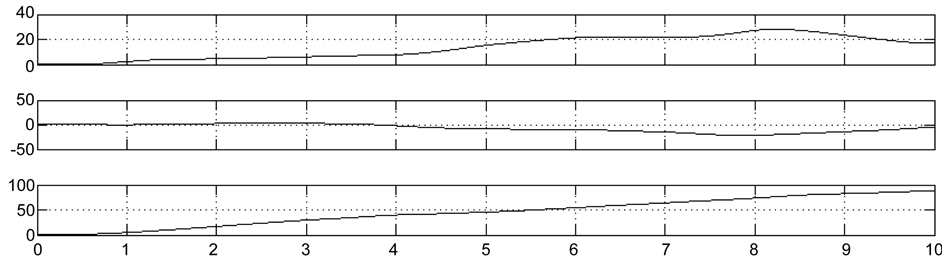
Figure 6. Curve: Response time curve of aircraft position xyz
图6. 飞行器位置xyz随时间响应曲线
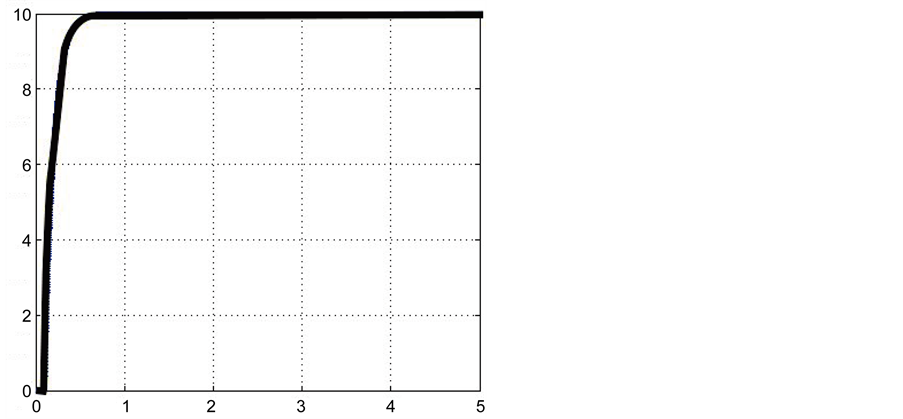
Figure 7. Curve: Response time curve of body velocity Vt
图7. 机体速度Vt随时间响应曲线
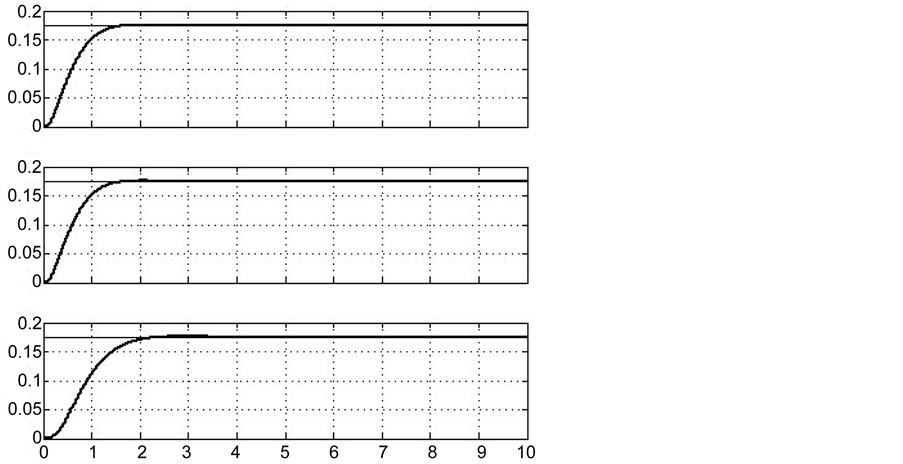
Figure 8. Curve: Response time curve of phi, theta and psi
图8. 姿态角随时间响应曲线
5. 结论
本文对混合式VTOL UAV进行力和力矩分析,并根据飞行力学和欧拉方程建立了它的动态模型。在分析飞行器飞行机理和模型的基础上对其设计了PID控制器,最后通过simulink对其进行了仿真,仿真结果表明PID闭环控制器能有效的实现对系统的控制。