1. 引言
农业是我国经济发展的重要组成部分 [1] 。水分直接影响着植物的生长发育以及产量和品质 [2] [3] [4] [5] ,适时、适量的浇水是保证农民获得高产优质蔬菜的重要环节。
目前,节水灌溉方式主要有滴灌、喷灌、沟灌和穴灌 [6] 。
滴灌是通过安装在毛管上的滴头、孔口或滴灌带等灌水器将水一滴一滴地、均匀而又缓慢地滴入作物根区附近土壤中的灌水形式。缺点是:容易堵塞;导致盐渍化;影响农作物根系发展。
喷灌是指利用动力设备驱动相关机械,使水在压力作用下通过喷嘴(喷头)喷射到空中,然后以雨滴的状态洒落至烟田的灌溉方式,局限是受风影响大;设备投资高;耗能大。
沟灌作业一般采用单沟灌水,即一沟挨着一沟依次灌水,水分沿着水沟渗透两侧垄,沟底部分在重力的作用下浸润土壤。作业速度快,而且地温变化相对较小,作业效果优于单沟灌,但容易使土壤结构被破坏。穴灌作业时在相邻两株烟草的中间打一个直径和深度均为20 cm左右的穴(孔),然后舀水逐穴(孔)进行灌水,每穴(孔)灌满为止,但作业费时费工 [7] 。
我国的灌溉机械还处在起步阶段,浇水这一环节费时费力,机械化程度地,无法按需浇水。实现机械自动化浇水是保障农业经济效益的有效措施。
针对这一现象,本文研制了一种基于ARM控制系统下的田间自动化定量浇水,可自动确定植株位置,精准浇水,节约水资源。
2. 整体结构与主要技术指标
2.1. 整体结构
田间自动化定量浇水机采用自走式,主要由动力系统、传动系统、行走系统、检测控制系统、光箱、水箱、潜水泵、电瓶、电磁阀等组成,总体结构如图1所示。2个12 V蓄电池串联后作为电磁阀和潜水
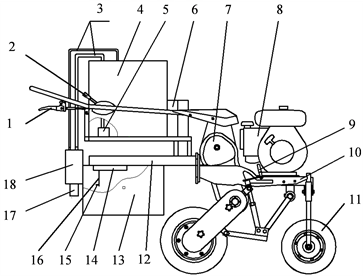 1. 转向离合;2. 行走离合;3. 输水管;4. 水箱;5. 潜水泵;6. 电瓶;7. 变速箱;8. 发动机;9. 高度调节丝杠;10. 机架;11. 行走系统;12. 光箱悬挂架;13. 光箱;14. 检测控制系统;15. 摄像头;16. 摄像头悬挂架;17. 电磁阀;18. 储水罐。
1. 转向离合;2. 行走离合;3. 输水管;4. 水箱;5. 潜水泵;6. 电瓶;7. 变速箱;8. 发动机;9. 高度调节丝杠;10. 机架;11. 行走系统;12. 光箱悬挂架;13. 光箱;14. 检测控制系统;15. 摄像头;16. 摄像头悬挂架;17. 电磁阀;18. 储水罐。
Figure 1. Automatic quantitative watering machine structure diagram
图1. 自动化定量浇水机结构简图
泵的启动电压,所有负极接地。光箱通过光箱悬挂架固定在浇水机后方,光箱上方安装着监测控制系统,摄像头通过悬挂架固定在光箱中心线后方位置,摄像头尾部通过数据线与ARM板连接,光箱里面均匀布置着8个灯条安置架,每条灯条安置架上面都安装着一个12 V LED灯条和漫射板。水箱里安置一个潜水泵,通过两条输水软管与储水罐相连接,水箱里的水通过潜水泵、电磁阀和两条输水管循环起来,保证储水罐里时刻充满水。储水罐连接在光箱后方中间位置,其底部与电磁阀相连。
2.2. 工作原理
浇水前,首先调正浇水机,使摄像头位于烟垄中心线正上方。根据垄高调节高度调节丝杠以调整整机高度,然后调节光箱悬挂架使机器行进过程中光箱不碰触植株,且能隔绝外界大部分光线。最后调节摄像头悬挂装置,使得摄像头距离垄顶平面的垂直距离为10~15 cm,距电磁阀的水平距离为12~15 cm。
浇水机工作时,打开行走离合,变速箱将来自发动机的动力传给行走机架,带动浇水机的前进。打开ARM板开关和潜水泵开关,安装在ARM板上的摄像头在行走过程中检测植株位置,获取图像,然后将数据传递给ARM板,ARM板将摄像头取得的数据与原始设定的数据作比较,如果摄像头所获取的数据在所设定的数据范围内,则认为检测到烟草位置。此时ARM板将向继电器控制电路输出一个低电平信号,继电器控制电路接收到该信号后,位于继电器中的电控开关闭合,电磁阀得电导通,完成浇水。浇水量可以通过电磁阀打开的时间长短来控制,电磁阀打开时间通过ARM板输出的信号控制。
2.3. 主要技术指标
依据浇水农艺和浇水机功能特征要求,确定自动化定量浇水主要技术指标如表1所示。
浇水机的实物图如图2所示。
3. 机器视觉部分
3.1. 图像特征
1) 颜色特征。这是一种全局的特征,主要描述了目标图像或者目标图像区域所对应事物的表面性质。

Figure 2. Physical map of automatic quantitative watering machine
图2. 自动化定量浇水机实物图
2) 纹理特征。纹理特征指的是图像的灰度等级变化,它反应的是物体表面的方向性、粗糙度以及物体表面所符合的某种规则性。
3) 形状特征。这是图像中一种高级的视觉特征,可以用来表示目标物体的姿态和结构 [8] 。
3.2. 检测算法
采集植物幼苗田图像,对图像的颜色特征进行分析。对图像中植物、黄土、黑地膜、白地膜分别随机选50个像素点,逐一提取每个目标像素点的R分量值、G分量值、B分量值,并根据提取数据画出以上四个目标的RGB分量值散点图。需要计算分析四个目标RGB三个通道数据之间的关系来确定区分植物目标的阈值 [9] [10] 。
然后分别计算四个目标的各通道分量值均值,以计算出的R、G、B分量均值作为该张图像数据中植物、黄土、黑地膜、白地膜的代表值:
(3-1)
(3-2)
(3-3)
1) G-R梯度变化
在G-R归一化数据图中,烟草数值最大,与烟草数据相距最近的是黑地膜数据。计算烟草数据与黑地膜数据的梯度变化。
2) G-B梯度变化
在G-B归一化数据图中,烟草数值最大,与烟草数据相距最近的是黄土数据。计算烟草数据与黄土数据的梯度变化。
3) B-R梯度变化
在B-R归一化数据图中,烟草数据介于黄土和白地膜之间,与烟草数据相距最近的是黄土数据。计算烟草数据与黄土数据的梯度变化。
4) G/B梯度变化
在G/B归一化数据图中,烟草数据最大,与烟草数据相距最近的是黄土数据,计算烟草数据与黄土数据的梯度变化。
3.3. 检测控制系统
检测控制系统是浇水机的核心部分,用以实现烟草位置的检测,电磁阀开闭的控制和浇水量大小的控制。
检测控制系统主要由ARM板、摄像头和继电器控制电路组成,检测控制系统固定在光箱顶部的检测控制系统安装口上。ARM板和继电器控制电路由两个12 V电瓶串联后,通过电源转换模块将电压转换成5 V供电,所有负极接地。其工作流程图如图3所示。
摄像头固定在光箱中的摄像头悬挂架上面,可实现摄像头前后方向和上下方向的位置调节,摄像头尾部通过数据线与ARM板相连,并通过数据线将所获取的数据传递给ARM板。
ARM板中存储着设定好的程序,不同的颜色在ARM板的程序中存储的数据是不一样的,经过大量试验,总结出在ARM板的程序中代表烟草“绿色”的合适数据范围 [11] [12] 。ARM板接收到摄像头采集的图像数据后,对数据进行分析和处理,当所获取的数据在代表“绿色”的数据范围内时,ARM板向继电器控制电路输出低电平脉冲信号,以控制继电器中电控开关的闭合。通过设定的程序可以控制低电平脉冲信号的长短,从而确定继电器中电控开关的闭合时间。
继电器控制电路用来控制电磁阀的打开和关闭。当继电器控制电路接收到ARM板发出的信号后,通过光电耦合器使该信号完成“电–光–电”的转变,从而控制继电器中电控开关得电闭合,此时电磁阀得电导通,完成浇水。当低电平脉冲信号结束时,继电器中的电控开关打开,电磁阀关闭,结束浇水。
3.4. 检测系统流程
浇水机前进,摄像头采集图像数据,提取图像中间640个像素点的RGB值,计算各像素点G-B值、

Figure 3. Test control system workflow
图3. 检测控制系统工作流程图
G-R值并归一化处理,当至少有70个像素点满足G-B值> 0.85且G-R值> 0.85,再提取500 × 50像素区域RGB分量,计算各像素点G-B值、G-R值并归一化处理,在计算图像数据的G-B数值与G-R数值,并进行归一化处理后,所有代表植株的G-B特征值最小为0.81,G-R特征值最小为0.8431。因此,以G-R > 0.85且G-B > 0.85作为区分植株与黄土、黑地膜、白地膜的阈值。当至少有5000个像素点满足G-B值> 0.85且G-R值> 0.85时输出控制信号,电磁阀打开,浇水量延时,输出信号结束 [13] 。
自动化浇水机检测系统设计中还需要必要的软件支持。Visual Studio是目前非常流行的,由微软公司开发的Windows平台应用程序开发环境。集成开发环境的界面增加了很多新的功能,变得更加高效,同时也更加简单明了 [14] 。本设计检测系统软件编程采用C语言程序,基于Open CV,以VS2010为开发环境进行编写。
摄像头固定在光箱中的摄像头悬挂架上面,可实现摄像头前后方向和上下方向的位置调节,摄像头尾部通过数据线与ARM板相连,并通过数据线将所获取的数据传递给ARM板。
ARM板中存储着设定好的程序,不同的颜色在ARM板的程序中存储的数据是不一样的,经过大量试验,总结出在ARM板的程序中代表烟草“绿色”的合适数据范围。ARM板接收到摄像头采集的图像数据后,对数据进行分析和处理,当所获取的数据在代表“绿色”的数据范围内时,ARM板向继电器控制电路输出低电平脉冲信号,以控制继电器中电控开关的闭合。通过设定的程序可以控制低电平脉冲信号的长短,从而确定继电器中电控开关的闭合时间。
继电器控制电路用来控制电磁阀的打开和关闭。当继电器控制电路接收到ARM板发出的信号后,通过光电耦合器使该信号完成“电–光–电”的转变,从而控制继电器中电控开关得电闭合,此时电磁阀得电导通,完成浇水。当低电平脉冲信号结束时,继电器中的电控开关打开,电磁阀关闭,结束浇水。