1. 引言
系泊系统是通过缆绳或其他机械装置将水面结构实施与固定点连接,被系泊结构物具有抵御一定环境条件的能力,保证设计环境下的作业需求,遭遇极端海况时,能够保证结构物和系泊系统本身安全。典型的系泊系统组成可分为上浮体固定端,导向装置,系泊主体,和海底固定端。由于近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成。而锚链的选择是多样性的,为了尽可能的节省锚链的材料、根据不同要求选择不同的锚链型号以保证锚链末端与锚的链接处的切线方向与海床的夹角不超过16˚,否则锚会被拖行,致使节点移位丢失。还需要确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
本文主要讨论的问题有二:
对于问题一,在已知重物球的质量以及锚链的长度下,将该传输节点放在水深18 m、海水平坦且海水密度确定的环境下,分别计算风速为12 m/s和24 m/s时的钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
在问题二中,在以上假设条件均不变的情况下,如何调节重物球的质量才能使钢管的倾斜角度不超过5˚,锚链在锚点与海床的夹角不超过16˚。
在讨论上述问题中我们主要采用了基本的几何受力分析方法、微分方程方法和最优化方法优化求解文中
模型,从而得出结果。
2. 计算模型
问题一中,我们构造了
模型帮助计算吃水深度与各节钢管之间的倾斜角度。此处引用参考文献 [1] [2] [3]。
该模型是由以下三个受力分析部分综合而来:
第一步:首先对该系泊系统整体进行受力分析(图1):
水平方向:
;
竖直方向:
;
其中,
是海床对锚的支持力,
为系泊系统中所有物体受到的浮力,
为浮标上半部分所受到的风力,
为锚受到海床的摩擦力。
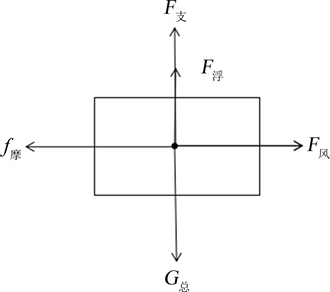
Figure 1. Overall force analysis of mooring system
图1. 系泊系统整体受力分析图
由受力分析图得出两个方程:
①
其中,h是浮标的吃水深度,v是风速。
第二步:再对锚单独受力分析(图2):
水平方向:
;
竖直方向:
;
由受力分析得出两个方程:
②
其中,
是锚所受到的浮力,T是锚所受锚链的拉力,
是锚所受到的重力,
是锚受到海床对它的摩擦力,
是锚受到地面的支持力。
第三步:锚以外的系统作总的受力分析(图3):
水平方向:
;
竖直方向:
;
由受力分析图得出两个方程:
③
其中,
是锚以外的系统所受的浮力,
是浮标所受的风力;为除锚外系统所受到的重力,
为锚对锚链的拉力,
是拉力方向与水平方向的夹角。
综合以上①②③,可得h关于θ1的方程:
函数模型。利用MATLAB软件编程,将θ1作为参量,令
;
;
其中G2为该系泊系统所受的出去浮力之后的重力;f为该系统受到的浮力。

Figure 3. Force analysis of the system except anchor
图3. 除锚以外系统受力分析
该
函数模型用于求解吃水深度与风速之间关系,还可以帮助计算出各节钢管之间的倾斜角度。
3. 结果与分析
3.1. 海面风速为12 m/s和24 m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的 吃水深度和游动区域
通过
函数模型,带入以上两个风速可得锚的吃水深度以及各节钢管的倾斜角度,其结果如表1展示。
其中钢管的倾斜角度为弧度(rad)。
对于锚链的形状的模型建立:此处引用参考文献 [4] [5] [6]。
此时设铁桶下方距离海床为y,则由题意得:
;
其中,a1、a2、a3、a4和a5分别为第一、第二、第三、第四和第五根钢管相对于竖直方向的偏转角。
通过微分方程可得出:
;
其中,
是参量。
浮标的游动区域的计算:此处引用参考文献 [7]。
建立相应的平面直角坐标系,已知y的范围
;从而得出x最大值为6.9448 m;x的最小值为6.118 m。
其中x为所建立的平面直角坐标系的横坐标,即所求浮动区域的内径。
进而浮标的浮动区域为一个内径为6.1182 m,外径为6.9448 m的圆环,圆环面积为8.4762 m2。
3.2. 风速为36 m/s时模型的结果
通过
函数模型得出当风速为36 m/s时浮标的吃水深度以及各钢管之间的倾斜角度,如表2所示。
此处引用参考文献 [8] [9]。
此时得出x的范围是
;圆环面积为:223.69 m2。
3.3. 重物球质量的调节
调节重物球的质量使a5的角度小于5度;将第一题中的重物球质量设为M,建立一个a5—(M)的函数,由此得出:新系统的重物球必须保证能够使钢桶满足偏转角度小于5度,即得出此时为M = 2017千克(即为M的最小值)。此处引用参考文献 [9]。
同样,另一方面必须保证整体最大浮力(即当浮标全部没入水中时的浮力)大于整体的重力,从而此时的重物球质量
。
4. 结论
在简化了系泊系统的设计问题上,采用数值模拟的手段计算系泊系统的各类数值,主要得出如下主要结论:
1) 本文中所得出的锚链的形状符合一般情况下的悬链线方程;
2) 在风速为36 m/s时,浮标的吃水深度为0.7233 m;
3) 当风速为36 m/s时,为使钢桶的倾斜角度不超过5˚,锚链在锚点与海床的夹角不超过16˚,重物球的质量M的范围应为
。