1. 引言
种群生态学是生态学中一个极其关键的组成部分,也是现今在国内外生物数学中发展相当迅速、体系比较成熟的组成部分。在种群生态学中,种群间相互作用大致上可以分为三种,分别是捕食-食饵作用、竞争作用和互惠作用,而绝大多数的相互作用是以捕食-食饵形式存在的 [1]。因此,对于生态系统的整体稳定性而言,捕食者与食饵的生存状况起到了决定性的作用。我们需要建立数学模型,描述捕食-食饵系统,并且通过将稀疏效应引入捕食-食饵系统,从理论上能够使系统更真实地反映实际复杂的生态环境,对保护生态平衡具有极其重要的意义与实用价值。
在生态系统中,有些食饵喜欢独居,当种群密度较为稀少时,交配机会减少,繁殖能力也随之下降,也有可能造成种群间近亲繁殖,降低了整个种群的质量,导致食饵种群绝灭,捕食-食饵系统稳定性受到影响进而发生改变。1987年Kuno提出了在稀疏效应下的食饵种群模型。近年来,对于具有稀疏效应捕食-食饵模型的研究得到了很大的发展 [2][3][4][5],在生态学中,具有稀疏效应的捕食-食饵系统在一般情况下可表示为
(1.1)
其中:x表示t时刻食饵种群数量;y表示t时刻捕食者种群数量;
为食饵种群增长率;
分别为食饵捕食者2种群的相互影响函数。如果不添加密度制约这一因素,且将捕食者与食饵之间的相互作用视为线性的,则系统(1.1)就变成Lotka-Volterra捕食-食饵系统。文献 [5]考虑到密度制约的因素,研究了当
,
,
(其中所有参数均为独立正参数,以下同)时的捕食-食饵系统,得到了平衡点以及极限环存在的所需条件。文献 [6][7][8][9]则引入了食饵的投放率
,进而对具有常投放率
[6][7][8]和线性投放率
[9]的稀疏效应捕食系统
(1.2)
进行了研究,利用定性理论分析了系统的正平衡点、极限环、分支等动力行为。
通过上述文献,我们可以得出结论:无论食饵是在无投放率、常数投放率或线性投放率的条件下,所研究的捕食-食饵系统均可以在不同的参数控制下能使捕食者和食饵种群达到稳定状态。然而在实际的生态环境中,捕食-食饵系统是比较复杂的,食饵的投放率通常情况下是非线性的,因此本文讨论食饵具有平方次投放时的稀疏效应捕食-食饵系统:
(1.3)
其中
均为独立正参数。
2. 系统平衡点分析
对系统(1.3)作变换:
,系统(1.3)转化为
(2.1)
其中
均为正常数,根据捕食-食饵系统在生态学上的实际意义,只在区域
内进行讨论,且系统的初始条件应满足
。系统(2.1)有3个平衡点:
其中
。
定理2.1. 对系统(2.1),① O是系统的鞍点;② 当
时A为系统的鞍点,当
时A为系统的渐近稳定结点;③ 当
时或当
时,系统存在正的平衡点
,设T为方程(2.1)的一次线性近似系数矩阵的迹,当
时为稳定的结点或焦点,当
时为不稳定的结点或焦点。
证明:设系统(2.1)的一次线性近似系数矩阵为J,
。
1) 对平衡点O,其系数矩阵
,由此可知两个方程的特征根分别为0,−1,该点为系统的一个鞍点。
2) 对平衡点A,其特征根为
,显然
,所以,当
即
时,A为系统鞍点;当
即
时,A为系统的稳定结点,且所有特征值均具有负实部,所以结点A是渐近稳定的 [10]。
3) 对于平衡点B,可以分成如下三种情况进行讨论:
a) 当
,
时,易知
,所以有
,
,系统存在正平衡点。
b) 当
,
时,
,
,系统存在正平衡点。
c) 当
时,若想要系统存在正平衡点,则需让
,整理得
时,所以得
时系统存在正平衡点。
对于正平衡点B
所以B点必为结点或焦点。
设
,则
当
时,平衡点B稳定,当
时,平衡点B不稳定。证毕。
3. 极限环的存在性
引理3.1. 系统在
内的一切轨线都正向有界。
证明:x轴和y轴均是系统的积分曲线,当
,
时,
,
,
。此时可分成两种情况证明
必正向有界:
1) 当
时,
,
。若存在
,使得
且
,
则由
,矛盾。
2) 若
,则
,所以
是系统的无切线且轨线是穿向
的左边,因此
,
。
综上,
,即
正向有界。
下证
也是正向有界的,记
,设直线:
,其中c为充分大的正参数,则
因为
正向有界,当c充分大时,
,且
必在由x轴和y轴,直线
及
所围成的区域Ω内,所以
必在区域Ω内,所以
,
都是正向有界的。证毕。
此引理说明,只要捕食者和食饵两种群的初始密度都不为零,则这两个种群的种群密度不会出现无限大的情况,捕食者和食饵之间必将互相制约,并分别被控制在一定的数值范围内。
定理3.2. 当
或当
,且
时,系统(2.1)在
内存在一个稳定的极限环。
证明:当
或当
,且
时,系统存在正的不稳定的平衡点B,同时也满足定理3.1 ②,所以此时A为系统的鞍点。比较
,
,
此时
,所以
,进而可知
。故当
或当
,且
时,系统在区域
上有存在极限环的可能性。
为了使环域只包括平衡点B而不包含平衡点A,构造如下环域:
,易知
,
为系统的轨线。当
,
时,有
,轨线方向为y轴负方向;当
,
时,有
,因为
,所以
在
的条件下必小于0,则
,轨线走向为x轴正方向;当
,
时,有
,轨线方向是由外侧流向内侧;当
,
时,有
,把
代入,得
,由已知条件可以判定,
,轨线方向是由外侧流向内侧。所以,由
,
,
,
所围成的矩形区域构成了环域的一条外边界线,又因为在区域内只有B点这一个不稳定的正平衡点,根据Poincaré-Bendixson环域定理 [11],系统在
上肯定存在一个稳定的极限环。
定理3.3. 当
,且
时系统(2.1)在
内不存在极限环。
证明:取Dulac函数
,经过计算,可得
根据Dulac判据 [11],当
且
时,系统(2.1)在
内不存在闭轨,即在
内不存在极限环。证毕。
4. 数值模拟
本节利用数学软件Maple对稀疏效应下具有平方次投放率的捕食-食饵系统进行数值模拟,通过该模拟,可以直观地观察出系统的局部轨线的具体的绕行方向,图1清晰地看出在一定的限制条件下系统(2.1)存在着稳定的正平衡点,图2可判断出在定理指定的限制范围下系统内存在极限环,从而验证本文中定理的正确性。
图1根据定理2.1的条件,模拟当
且
时系统存在稳定的正平衡点B。
图2和图3根据定理3.2的条件,模拟1)
,
,
,
,
都为正数;2)
,
,
,
,
都为正数时系统内存在极限环。
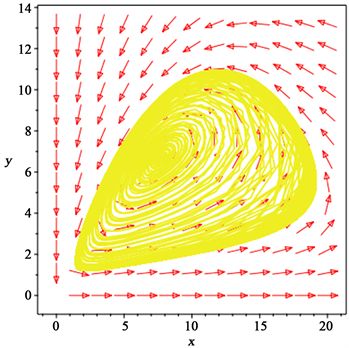
Figure 2. Stable limit cycle when
and
图2. 当
,且
时,稳定的极限环
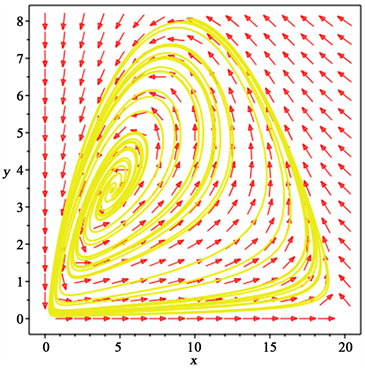
Figure 3. Stable limit cycle when
and
图3. 当
,且
时,稳定的极限环
5. 系统的生态意义
对于稀疏效应下具有密度制约的捕食-食饵系统来说,如果想维持整体系统处于一种相对动态的稳定,就必须通过外界的干预,具体方法为:定期定量向系统中投放、补给食饵。通过这种方法我们可以保护系统,促进捕食-食饵系统的可持续发展,进而保持生态系统的平衡。对带有常数投放率和线性投放率的捕食-食饵系统已经得到了一些结论,见文献 [6][7][8][9]。其中文献 [9]的作者在其文末指出,现实条件下,食饵的投放率很难满足线性关系,本文就是在文献 [9]的思路引导下,研究了食饵投放率为平方次情况下的捕食-食饵系统,进而发现,只要参数在一定范围内控制得当,那么捕食者和食饵的种群数量都可以达到稳定状态。结合参考文献,本文得出如下结论:当食饵具有常数、线性、平方次投放时,通过控制调节系统的各个参数,具有稀疏效应的捕食-食饵系统均可以在一定范围内达到稳定状态。在此结论的基础上,本文也提出猜想,当食饵具有高次投放率甚至指数函数投放率时,具有稀疏效应的捕食-食饵系统是否可以通过改变参数来控制系统,使系统仍然可以保持稳定呢?这是我们后面值得进一步探讨的问题。
致谢
该论文由中央高校基本科研业务费专项资金No.2017B17314资助。