1. 引言
一般而言,建筑物因日久而逐渐老化,墙缝吸收水分湿气,经历温差变化所产生的热胀冷缩的效应,加上地震或台风的破坏,导致外墙或其饰面材料易被破坏、龟裂。若外墙饰面材料剥落,极大可能造成意外伤亡。因此,若能在外墙或饰面材料剥落之前提前预警,则可将意外伤亡的概率降至最低。有鉴于此,本文之主要目的,在于提供一套有效的高楼外墙裂缝检测系统,让原本繁杂、危险且高成本的例行性工作,通过信息技术而变得简易而节省。
本文拟以小型无人机搭配智能运作系统,能够在地震或者平时辨识饰面材料的损毁程度,以期能让工人减少攀高的次数,进行快速检测,识别具有潜在危险的饰面材料位置,且评估饰面材料退化的程度。为了实现上述目的,本文以机器学习作为解决问题的主要手段,以深度学习为核心,使用卷积神经网络(convolutional neural network,CNN)技术将辨识功能实施在嵌入式开发板上,让人能够以简易方式辨识大楼外墙饰面材料破裂的程度。
2. 研究方法
利用无人机对建筑外墙进行拍摄,再将搜集回来的图像数据输入到嵌入式开发板,进行损坏程度的辨认,自动判断是否需要维修或更换。要想将无人机所搜集而成的数据分类并进行分析,为此需先在嵌入式开发板(本文采用Jetson TX2)与计算机主机内同时建立Tensorflow [1] 的环境并使用Keras [2] 作为架设模块的基础,利用Keras设立CNN模型且以Tensorflow作为后端进行训练。在训练前先将数据集分成几个类别(即标签化)并进行数据分类处理,将劣化程度相近的照片归成一类;利用不同的数据进行训练,再根据训练适当调整参数,让模块评估达到最低的错误率;最后将训练完成的模块储存起来放进Jetson TX2 里,就能进行饰面材料损坏程度的判断了。
上述CNN是一种由类神经网络为基础设计而成的模型,其可以通过减少神经元与撷取特征改变类神经网络的运算量。CNN是目前深度学习领域中最广泛使用的一种模型,擅长处理图像数据。CNN与图像处理技术不同,传统的图像处理是针对输入的图像进行分析与加工(如形态学处理、撷取边缘、图像切割、增加、修复等),而CNN则采用不同策略,将大量的图片输入到类神经网络之中,通过图层的特征撷取,最后加以分类以识别图像。相较于传统的图像处理方法,CNN能够处理复杂的图像,并具备学习的能力,亦可用于预测。目前的CNN的主流设计包括LeNet-5 [3] 、AlexNet [4] 、Network-in-Network [5] 与GoogLeNet [6] 等。其中,AlexNet采用最大池化(max pooling)技巧,导入ReLU (Rectified Liner Units)机制,让神经元处理非线性情境的“梯度消失”问题;AlexNet在处理大量的数据与撷取较多的特征时,在识别的正确率及整体的训练速度有较佳的表现。
因此,在多方比较后,本文决定采用AlexNet作为实现目的的主要模型。AlexNet设计将图片分解成像素单位,并将每个像素输入类神经网络,通过连续的卷积程序作特征撷取,并通过池化(pooling)程序凸显每一个区域的最显著特征,此举可减少神经元的数量并降低所需的运算量。通过输入ImageNet的图像数据库作训练 [7] ,该模型能够从120万张照片作为训练样本、5万张当测试组,从中分辨1000种类型的图片。
在CNN模型中,卷积程序主要是通过图片与卷积核作内积运算来撷取所需的特征。例如,肖进胜等针对现有的基于CNN的图像超分辨率算法参数较多、计算量较大、训练时间较长、图像纹理模糊等问题,结合现有的图像分类网络模型和视觉识别算法对其提出了改进 [8] 。周敏等将深度卷积神经网络应用于遥感图像飞机目标分类问题,按大致4:1的比例分为训练集和测试集,并对训练集进行合理扩充,针对遥感图像与飞机分类的特殊性,结合深度学习卷积神经网络的相关理论,设计了一个5层卷积神经网络 [9] 。葛芸等人将大规模数据集ImageNet上预训练的4种不同卷积神经网络用于遥感图像检索,在UC-Merced和WHU-RS数据集上得到了一系列实验结果 [10] 。傅隆生等人提出一种基于LeNet卷积神经网络的深度学习模型进行多簇猕猴桃果实图像的识别方法 [11] 。
如图1所示,红色框内的矩阵(维度3 × 3)与维度3 × 3卷积核进行内积而得的纯量值3填入等号右方的2 × 2矩阵对应位置之中,此即为特征值。通过红色框窗不断地往右往下位移(此例为1)再与同一卷积核作内积,可得到其他特征值并逐一填入等号右方的矩阵;该矩阵纪录撷取得到的特征值,将保留到下一层作后续计算。
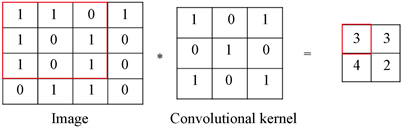
Figure 1. Convolution operation example (the 2-by-2 matrix on the right of the equal sign is the eigenvalue extracted from the convolution kernel according to the original image)
图1. 卷积运作范例(等号右方2 × 2矩阵为依原图像通过卷积核所撷取之特征值)
卷积层找出特征后,即能作为输入变量进行一般的类神经网络进行分类模型训练,但网络结构愈趋复杂,样本数若不够庞大,则容易产生“过度拟合”的问题。因此引入“池化”或局部取样(subsampling)的技巧,亦即在卷积核中再通过n × n的小区域进行汇总,以凸显该区域的最显著特征。关于池化的技巧,可在很多应用文献中找到,此不赘述。
AlexNet使用双GPU (Graphics Processing Unit,图像处理器)来训练类神经网络,因此将整个网络分散在两个GPU执行,再通过现行GPU架构的特性,能够让GPU直接存取另一个GPU的内存而不需通过主机的内存进行存取。这一特性可用来实现平行运算。
由上可知,AlextNet的深度学习技术可以将数据通过多个处理层的线性或非线性转换,自动萃取出足以代表数据特性的特征。深度学习具有自动萃取特征的能力,因此也是一种特征学习的技术。
3. 图像预处理
通过无人机收集外墙或饰面材料裂缝图像数据并作处理,要先建构一个处理图像的环境,将数据通过224*224的方式撷取,撷取完毕之后再将图像输入到 PC 主机端并预处理图像。之所以选择224*224作为处理单位,是多次运算后基于预算量与检测率综合考虑而定的。图像预处理的目的,在于将无人机拍摄的RGB三信道原始图像转为颜色相对单纯、但仍能保留原图像重要信息之形式,以利于机器学习软件系统能更有效地捕捉其重要特征,而不至于因图像 RGB 颜色差异而干扰学习。之所以这样,是因为在研究进行过程中,多次实验显示机器学习的效果不如预期,后经详细检视发现,AlexNet误将壁砖颜色视为需学习的特征之一,但壁砖颜色在本研究并非关键特征,因此先对图像执行预处理。
图像预处理的步骤与算法如下:
1) 灰度化处理(Gray-level Transformation):公式为

如图2所示,右图为左图灰度化处理后的示意图。
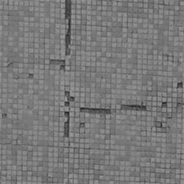
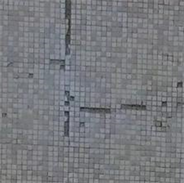
Figure 2. The original image and its grayscale processing results
图2. 原始图像及其灰度化处理结果
2) 图像二值化:二值化主要是将灰度图转化为黑白图,这个程序主要是将研究者感兴趣的部分与不感兴趣的部分区隔出来;通过设定灰度阀值,能将复杂的环境去除掉并且只显示裂缝的部分。利用计算软件MATLAB (版本2018a)的自适应(adaptive)二值化函数,针对不同的图像选择各自合适的阀值,可得到较理想的二值化结果。如图3所示,为图2的自适应二值化结果。

Figure 3. Adaptive binarization results of gray scale graph
图3. 灰度图的自适应二值化结果
3) 型态学运算处理:形态学用于二值化后的图像,通过利用数学处理来凸显图像的形状或特征(如边界或细线等)。形态学最基本的运算包括膨胀(dilation)、侵蚀(erosion)、开运算(opening)、闭运算(closing)。本文使用开运算,主要是希望能够强化裂缝的轮廓并且滤掉部分杂点。结果如图4所示。
4. 数据分类与参数调整
4.1. 图像数据收集
通过无人机以拍摄的方式收集原始图像数据,未处理过的数据是整张未经撷取的图片,如图5所示,其中的红色小框为待处理的撷取范围的示意图。

Figure 5. Original image of crack in exterior wall
图5. 大楼磁砖裂缝原始图像
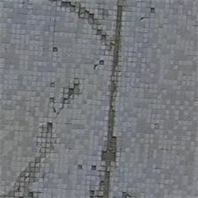
Figure 6. A schematic diagram of a crack
图6. 某处裂缝示意图
原始图像在被处理前,先刻意摒除容易造成干扰的因素(如窗户、树木等与壁砖劣化无关的部位),再一律以224 × 224的分辨率撷取原始图片的磁砖裂缝部分,撷取后将会获得数百张类似的局部图片,图6为其中之一。
本文的外墙裂缝图像采集于城市公共建筑,如图书馆、体育馆、商业大厦等,图7是其中的几个裂缝实例。
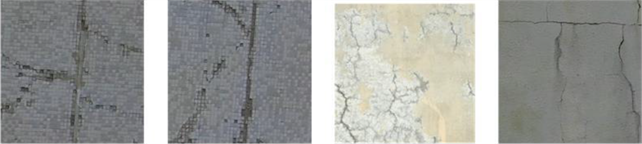
Figure 7. Four examples of cracks in exterior wall
图7. 四个外墙(瓷砖)裂缝实例
4.2. 数据分类
所有图片进行预处理程序之后,再按卷标分类,比如分为严重、一般和轻微三个等级。图片类别卷标的范例如图8所示。设定卷标完成之后,将数据分别放置于训练集与测试集两个文件夹内以利于后续存取。
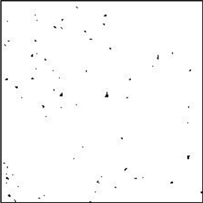
Figure 8. Volume labels are set to severe, general, and minor levels from left to right
图8. 从左至右依次将卷标设为严重、一般、轻微级别
鉴于计算软件MATLAB (版本2018a)具有强大的图像处理能力,可以考虑用其对图像进行批量预处理。在预处理完成后,开始建构CNN,开发环境需安装Python、Tensorflow与Keras,这样的组合为目前最常见。为了加速整个训练的流程,同时在PC端使用GPU进行训练;最后选择使用AlexNet作为训练的核心网络。
4.3. 训练与调整
通过输入不同的数据集与校正参数,来训练AlexNet并获取适当的模型。基本上,可以通过观察训练结果学习曲线(accuracy)与损失曲线(loss)的形态来决定参数是否可行。如图9所示,为显示训练集与验证集的学习曲线,分别用蓝色(accuracy)与橘色(val_acc)标识,数值越靠近1.0则代表模型训练越好越正确。图10的损失曲线则代表着模型的错误率,数值越低则代表着图片的判别错误的机率越低。图的横轴Epoch代表整个数据集输入到网络的训练周期。
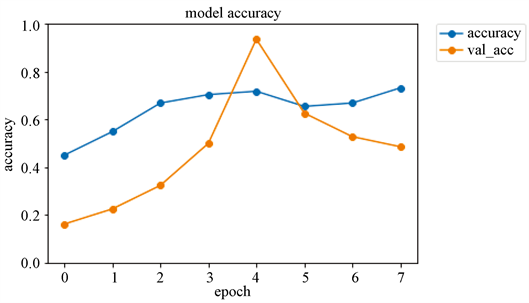
Figure 9. Accuracy learning curve
图9. Accuracy学习曲线图
验证集与训练集的资料都是从训练集的图片分类而得,验证集跟训练集的多寡会影响模型训练出来的结果。通过上述曲线,可作两个观察。第一,如图11所示,若测试集的曲线慢慢成长,但验证集的曲线并无明显增幅或发生弹跳(epoch ≥ 5的情境下),则表明出现了过度拟合(over-fitting);其发生的主要原因,是学习过程太久或训练的样本太少;一旦发生这种情形,需尝试改变数据集,例如增加图片或者是调整参数。另一种如图12所示,损失曲线的训练集曲线随着epoch增加而慢慢的下降,但验证集的曲线未见相应的增长或呈现弹跳现象;这种情况可能是因为图片的卷标搞错,导致模型无法正确学习,可以返回去检查图片的卷标是否存在分类错误。
参数调整是使用类神经网络训练必须面对的课题,本研究的核心参数为“学习率” ,在此可以通过观察Loss损失曲线图来调整;另外,还可以调整训练集与验证集的分配比例,通过这一调整可以让模型更加正确地学习。
5. 图像处理的结果
5.1. 实验执行步骤
为了测试方法的效能,实验执行步骤如下:
1) 将测试数据转换成224 × 224维度,无论任何大小都须转换;
2) 确认测试数据的完整性;
3) 辨识图片;
4) 统计验证结果;
5) 比较每个模型的错误率。
5.2. 按批次测试
将测试数据分成5个批次,都标示正确的标签,每一批测试图片为20张,所以总共有100笔的测试资料。通过统计预测的结果是否符合卷标,与观察模型的学习曲线来验证模型可用性。表1为每一个批次测试集类别的张数,通过输入不同类型的测试集来进行验证,从而避免了图像选择的特定性;其中,数据集四(DataSet4)和数据集五(DataSet5)特定类别的测试张数为零,最主要的用意是为了确认特定类别的错误张数不会偏高。
5.2.1. 未经预处理的测试集
未经过预处理的训练集的学习曲线(正确率数值)与损失曲线(错误率数值)分别如图13和图14所示。由图13可见,验证结果与实际的训练差异太大;由图14,可以观察到错误率也居高不下。因此,未经预处理的测试集的正确辨识率差强人意,这也可以观察到预处理模型必要性。此外,也可以很明显地了解到,在数据量少的情况下分成三类,再加上每个类别的共通性又不大的情况下,导致整个模型无法正确地训练。
5.2.2. 经过预处理的训练集
经过预处理后,三类卷标的正确识别率得到了有效的提高,对比结果如表2所示。显然,经过预处理图像,其识别率大大高于未经预处理的图像。

Table 2. Comparison of identification rates of three types of test sets
表2. 三类测试集识别率比较
6. 结论与后续研究
本文通过设计、测试与实验,基于CNN的高楼外墙及饰面材料裂缝检测技术,建构一个能够快速检测的系统,让使用者能够有效地辨识裂缝的破裂程度。利用无人机,通过简易的操作,使得普通民众也能快速处理,可大幅地减少工人攀爬高楼的频次,可大幅地减少人力的损耗。特别是针对地震等自然灾害现场,通过无人机搭配本文的识别系统,可达到安全检测、快速识别等目的。
本研究尚有若干方向可改进,包括但不限于:
1) 增加训练集的数据量,让辨识的正确率更加提升,或是缩减神经网络的架构;
2) 优化二值化的程序,更加精准地凸显人们感兴趣的特征;
3) 对于数据集的标签需要提出更标准化的评估分类指标;
4) 对特定材料(如玻璃幕墙、外墙石材等)进行识别或过滤,以避免辨识错误;
5) 实现更高度的自动辨识功能,能够从影片自动圈选出磁砖裂缝部分,以达到更方便的检视;
6) 可以将本识别系统直接内置于无人机,使其能够做到实时的辨识。
NOTES
*通讯作者。