摘要:
为了减缓和降低气象灾害对人们生产、生活的影响,我国作为人影大国,人影作业的次数、强度都在增加,但其智能化管理的程度还很低。在加大人影作业智能化管理过程中,火箭炮作业时的府仰角和用弹量均易准确采集,但方位角的采集是一个重点和难点。为此,本文提出了一种数字化线性方位角传感器的设计方案。文中详细介绍了其工作原理和方位角采集实施方法。通过实验证明方位角采集稳定性、连续性好,精度高。
Abstract:
In order to mitigate and reduce the impact of meteorological disasters on people’s production and life, China, as a large country, is increasing the number and intensity of shadow operations, but the degree of intelligent management is still very low. In the process of increasing the intelligent management of figure operation, it is easy to collect the elevation Angle of rocket launcher and the amount of ammunition used, but it is a key and difficult point to collect the azimuth Angle. This paper presents a design scheme of digital linear azimuth sensor. The working principle and im-plementation method of azimuth acquisition are introduced in detail. The results show that the azimuth acquisition is stable, continuous and accurate.
1. 引言
目前人影的信息化智能化后台管理平台和软件都已开始应用,在人影作业的管理过程中发挥重要作用。炮射作业现场信息的智能化采集作为人影智能化管理的最后一公里,有一定的困难,特别是移动气象人影火箭炮现场作业信息的智能采集。
移动式火箭炮作业信息数字采集相对于有固定作业点的高炮 [1] 更加困难,目前火箭炮方位角采集是通过高精度的电子罗盘进行采集。由于火箭是全金属结构,对罗盘有极大的干扰,通常的作法是通过一个铝支架,与炮身保持一段距离进行测量。其缺点有三:一是高精度的电子罗盘本身很贵、不经济;二是在火箭炮上多出一个异型的结构,美观、安全都受到一定的影响;三是由于电子罗盘是非线性传感器,所采数据的稳定性、精度都受一定的限制。
本文提出了一种数字化线性方位角传感器的设计方案采用的是以线性电子器件为主的火箭炮作业方位角自动采集传感器,可充分避免电子罗盘的缺陷。其优点为:一是结构简单,可表贴在火箭炮炮身上安装;二是功耗低,采用手机锂电池供电;三是成本低,只有电子罗盘的10%左右。
2. 传感器线性测量方位角原理
不管火箭车怎样移动,在作业时炮管在地面的水平投影与大地的正南方都有一个夹角(如图1所示),只要能计算出此夹角就能算出人影火箭作业的方位角。
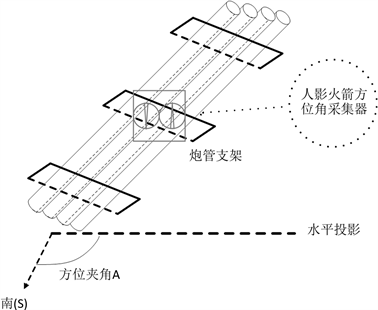
Figure 1. Azimuth angle diagram of rocket launcher tube
图1. 火箭炮管方位夹角示意图
2.1. 方位角测量的逻辑算法
在线性电位器两端加上恒压源,其中心抽头转动所取得的抽头电压是线性变化的这种特性正好可用来进行人影火箭的方位角测量。其测试原理如图2所示,一个电位器(R1)的电刷的位置由指南针的针臂决定,另一个电位器(R2)的电刷随炮管的转动而滑动。两电位器设置一个共同的参考点,根据两电位器输出端电压的变化可测量出方位角的大小 [2] [3] 。由于加在电位器两端的电压是直流恒压源且电位器是线性器件,因而滑臂滑动时就会得到线性变化的电压,根据电压变化的大小,就能测到线性变化的夹角大小。这种测量方法较电子罗盘稳定、精度高,费用极其低廉,且不怕与炮管安装在一起。具体测量方法如下:
由于电位器R1电刷的位置由指南针针臂决定,因此该电位器输出的电压就是正南方对应的电压VS。电位器R2的电刷位置由炮管的方向决定,将炮管转向正北方时得到R2的输出电压就是正北方对应的电压Vn。由此就可以得出单位电压变化对应的角度变化a (单位:弧度/伏特)如公式1所示。
公式1:
实际测量中,电位器R2的输出电压V2由炮管方向决定,电位器R1的输出电压V1由指南针针臂决定,则炮管投影与正南方的夹角A为:
公式2:
2.2. 数字化线性方位角测量的电路实现原理
整个电路由低功耗微控器 [4] [5] (MSP430)、基准电源模块、电位器以及方位角数字化输出模块组成。其中微制器是核心,两电位器输入的模拟电压在处理器内进行AD转换。在设计时,两个电位器有共同的参考点,将两路AD转换后的值进行比较,就可测量出火箭炮作业时方位角。电路设计原理图如图3所示。
电源模块是以SP6651A芯片为核心构成,使用一节锂电池作为电源,为电路其他模块提供3.3V的电源电压。基准电压模块由TL431芯片和分离电阻电容组成,其作用是提供AD转换的基准电压,通过MSP430单片机的P1.1口提供给单片机内部两路ADC作为参考电压。
采集炮管方位角时,电位器1、2的滑臂输出电压分别通过微处理器的8、9脚送入内部进行AD转换和数字计算,得出的方位角信息通过处理器的21、22脚传给电平转换芯片MAX3232。外部从MAX3232从14脚获得方位角信息。
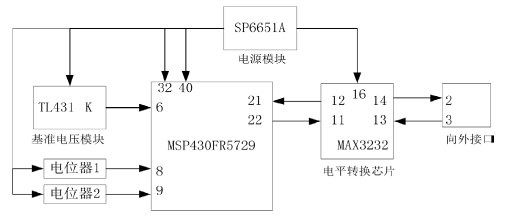
Figure 3. The circuit of azimuth collector
图3. 方位角采集器电路原理
3. 数字化方位角信息采集软件设计
在MSP430中编写软件实现方位角的读取,软件分两步进行,首先进行AD转换信息的读取,其次根据方位角采集逻辑算法计算出方位角大小。由于模拟信号在传输过程中会受到干扰,软件设计时一定要进行提高精度和抗干扰处理。得到准确的AD值后,根据方位角采集的逻辑算法进行计算,得到数字化的方位角。定时通过串口向外送出 [6] [7] 。其软件实现原理框图如图4所示。
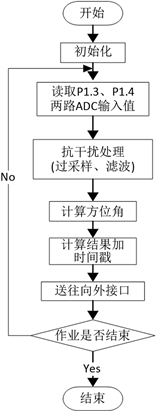
Figure 4. The software process of the implementation of azimuth calculation
图4. 方位角计算软件实现流程
4. 测试与验证
以一个固定支点的的杠杆(木棒)为平台,传感器固定在杠杆上(跟固定在火箭炮上一样的道理),采用手机电池供电。通过RS232串口与PC机相连。在PC机上,用C#语言工具设计一个方位角显示程序,其显示方式如图5所示。用电子软盘先标定正南方位置,转动一次杠杆用量角器测量杠杆转过的角度,再与传感器采集到的角度相比较,完成一次测量。经多次测量验证,传感器的稳定度、精度、线性度达到设计要求。其部份测量数据如表1所示。
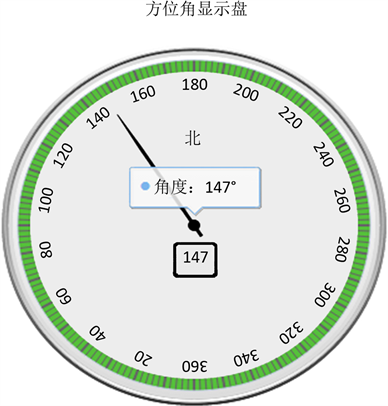
Figure 5. The graphical azimuth data on PC
图5. PC机图形化方位角数据
多次测试结果表明火箭方位角线性传感器的最小步进为0.5度,重复测量的精度为正负1度,完全满足移动作业火箭炮方位角测量的要求。本次实验AD采样用的是10位AD。
5. 总结语
本文介绍的基于线性转换电路的方位角采集器,该采集器具有成本低廉、稳定性好、精度高的特点。提出了一种针对目前火箭炮作业信息采集难点:火箭炮方位角采集的一种有效解决方案,并设计了软件平台予以验证。然而,人影作业管理还需要俯仰角、作业时间、用弹量统计等多种综合参数,故而,下一步工作是要将本方位角采集器集成到人影作业综合信息采集终端中去。