1. 概述
Hypack软件是美国coastal海洋图像公司(Coastal Oceanographic)的产品。该软件除了具备强大的测量成图系统功能外,还可与各种导航系统、测深仪(单波束、多波束)、波浪补偿器、绘图仪、打印机、潮位遥报仪、罗盘等多种测量、疏浚施工设备相连接分别组成自动化数字测绘系统和疏浚工况实时监测系统,是目前世界上测量、疏浚行业应用最为广泛的一种应用软件,也是一个功能齐全的水下地形数据采集与处理的软件包。
利用GNSS进行验潮测量方式与方法较多,如李炜 [1] 等基于Hypack 2014的GNSS PPK三维水深测量;柴冠军 [2] 等基于Hypack max软件的RTK验潮技术应用等,还有基于软件要求生成KTD文件进行验潮,也有采用流动站GNSS测出潮位,计算和Hypack测得潮位之间的差值,将该差值输入硬件设置的“垂直偏移”项进行改正潮位等等多种方法。这些方法或多或少存在精度不高、处理繁琐或理解偏差,甚至在国内因成果资料保密等无法实现的难题。长江委水文局多年来一直利用此软件作为长江河道测绘导航与数据采集使用,通过长时间、多版本的使用及经验积累,取得了一些成果。特别是对Hypack 2018新版本中“GPS MNEA-0183”驱动的应用及原始RAW数据的分析,得出了采用原始记录数据中KTC数据行的信息,进行GNSS三维水道观测方面取得了有益的经验,值得推广应用。
2. 基本原理与方法
2.1. GNSS三维水道观测技术原理
水道地形测量关键技术是获取水深值和瞬间的潮位值(或称之为水位值),目前,在长江内河的水深主要通过测深系统获取,潮位(水位)主要通过全站仪、水准仪或是水位自计等方式获得。而基于GNSS三维水道观测技术 [3] 即GNSS验潮模式进行水下地形测量,其潮位的获取来自于GNSS观测值,是利用GNSS实时动态测量技术及其他附属设备(如姿态仪等)实测的数据,通过实时或事后联合解算,计算出测深仪换能器声学中心的三维位置,从而通过软件推算,获得水下测点的平面位置和高程。所以,该方法被称为GNSS三维水道观测技术,因潮位值(水位值)来源于GNSS,所以也被称作GNSS验潮测量技术,平时所说的RTK无验潮也就是采用了GNSS观测值作为潮位值,所以本文统称为GNSS潮位或GNSS验潮。
GNSS三维水道观测的原理如图1所示。假设船舶静止在水面上,H为大地高,L为GNSS接收机天线相位中心到水面的高度,d为换能器到水面的距离(静吃水),T为船舶静态水面到当地基准面的距离(潮位),S为换能器到河道底边界面的距离,§为当地基准面到WGS84椭球面的距离,h为当地基准面下的河底高程。则由图1可以得到以下三个关系式:
(1)
(2)
(3)
假设当地基准面为1985国家高程基准面时,§即为高程异常,此时
高程。则式(3)可转换得到:
(4)
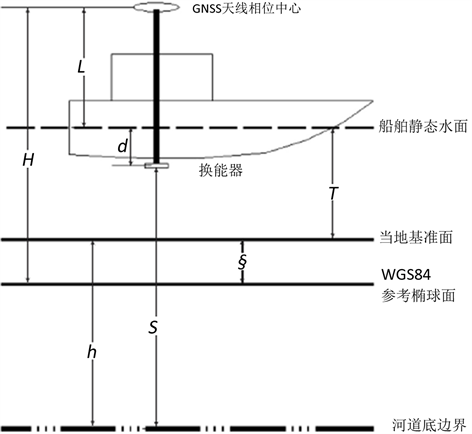
Figure 1. Theory chart of GNSS three-dimensional waterway survey
图1. GNSS三维水道观测基本原理图
根据实际生产可知:S由测深仪实时测得水深,d + L为固定值(钢卷尺丈量),若GNSS接收机实时采集到1985国家高程基准面下的正常高,便可实时测得水下1985国家高程基准的河底高程。
2.2. Hypack实现GNSS验潮的方法
2.2.1. 基于K和N值的验潮模式
在Hypack 2018软件大地测量参数设置界面中,通过选项RTK tidecalculation (RTK潮汐计算)的设置即可实现GNSS验潮测量。
通过软件选项可知,要实现GNSS验潮测量,则需要给出N值、K值,软件才能计算出GNSS潮位值。其中,N值为高程基准面从椭球面到大地水准面之间的转换,即大地高向正高的转换,称之为大地水准面差距(与国内高程异常值§存在区别,因高程系统的定义不同,故使用国外软件需加以区分);K值为高程基准面从大地水准面向深度基准面的转换,即正高向海图高的转换,即成图基准改正。不论选择此模式下的哪一种方式,前提是需要知道K值、N值,所以该方法只适合有精密的似大地水准面精化成果的作业区域。
2.2.2. 基于MNEA-0183大地高和海拔高验潮模式
Hypack软件中的NMEA-0183作为定位设备驱动,可以支持大多数DGPS设备,应用十分广泛。在原始数据中会记录GNSS定位信息原始数据RAW和GGA数据等,这两个数据段中记录了基于WGS-84椭球下的大地高和海拔高。目前,有单位在进行项目生产时采用这些数据计算潮位值。
通过软件明说可知:Hypack软件记录的原始数据中,其中RAW行中数据记录了大地高(即WGS84椭球高),数值是通过GNSS定位接收机测得的。MSG行中记录了GNSS定位接收机输出的海拔高,我们知道GNSS输出的信息是相对于WGS-84坐标系的,它是一个参考椭球体,所以GNSS输出的海拔高度是垂直于WGS-84参考椭球表面的高度(称为正高)而非我国的平均海平面高度(正常高)。通过长时间多项目的对比分析可知,海拔高减去大地高后,其数值取反即为原始数据MSG行中记录的常值(此值应为大地水准面差距),很多单位在进行数据后处理时,误把此值作为高程异常值§使用,故采用大地高减去此值作为潮位会存在误差。
另外,MSG数据行中第四个字符串若为GNGGA,则记录的为海拔高。有其他Hypack版本此字符串为GPGGA,则后面记录的为基于当地的正常高,此时再利用此方式计算潮位即为正确值,具体要区分软件版本、记录信息,并做好数据的现场对比工作。
2.2.3. 基于GPS NMEA-0183当地高验潮模式
Hypack 2018软件提供了GPS.CLL (即GPS NMEA-0183)驱动,此驱动除记录了常规的定位、速度等原始信息,还记录了潮位、特定信息等,是一个实时动态RTK值。在设置中需要设定的信息也更加丰富,记录的RAW原始数据也更加多样化,如KTC、TID等几行数据信息。
其中KTC数据行信息,主要语义见表1所示。通过其表述及多次生产试验可知,输入正确的当地基准转换七参数(网络CORS或基站模式),即可得到当地RTK高程,运用合理的数据处理方法即可实施GNSS三维水道观测。此方法精度更加可靠、有效,如果外业测量时加入姿态仪进行船姿改正,将会提高GNSS三维水道观测的精度和效益。

Table 1. KTC statement and description of original data information
表1. KTC语句及原始数据信息说明
在国内,还存在使用流动站GNSS测出潮位,然后计算和Hypack测得潮位之间的差值,将该差值输入硬件设置的“垂直偏移”项进行改正潮位,这种方法想利用本文2.2.1方法,但又却少似大地水准面精化资料,就采用流动站GNSS测出的这一点正常高与大地高差值代表整个测区的高程异常值,就精确测绘来说,此方法存在以点带面的问题,若测区内高程异常值是个变值,这样以固定值代替变值,会造成测量误差。
3. 项目试验
3.1. 项目实施
3.1.1. 参数求取及基站架设
首先,利用测区内分布均匀合理的高等级点求取测区七参数,并验证其精度。基准站架设在实验区域的中间,本次实验采用Trimble R10设备,采用实时动态RTK测量模式。
3.1.2. Hypack 2018设置与采集
船载定位流动站GNSS接入导航采集软件Hypack 2018,驱动采用GPS NMEA-0183模式。其设置与基准站一致,并利用移动站RTK或常规全站仪等其他方式检核。定位流动站最好竖直安装在测深探头上方,量取探头至护圈中心的总长,则天线高度等于总长减去测深仪吃水深,以提高竖直方向的准确度(需要注意Hypack软件采集的获取的原始高程信息均是基于天线护圈中心的高程信息,在后处理要特别注意这一点)。
在大地参数中输入正确的基准转换七参数。Hypack软件中硬件设置中加入定位及测深驱动模块,并正确设置各项参数,这里不再赘述。
本次试验选择了长约4 km的长江河段,水下测量采用横断面法,共测量了约40个断面,每个断面长约1 km,整个测量时间约6小时,为验证三维水深测量技术,水下作业期间在河段首尾采用人工和潮位计等两种方法进行潮位观测,用作对比。
3.2. 数据处理
项目试验数据处理的方式主要有:
1) 利用中心线法进行人工观测潮位内插。其方法是通过Hypack 2018单波束编辑器中的潮位内插,选择中心线法进行人工潮位数据改算,此值作为潮位的真值,GNSS潮位与其对比分析。
2) GNSS验潮数据处理。主要通过利用VB.NET开发的断面GNSS潮位观测值提取程序。最终提取每个断面的平均潮位,以及每个定标点的水位。
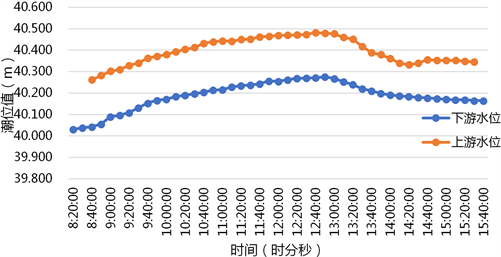
Figure 2. Tidal level observations during underwater operations
图2. 水下作业期间潮位观测值
4. 数据分析
为便于验证GNSS三维水道观测技术与方法的正确性,实验组在测量期间进行了人工和潮位计两种潮位观测,其观测值及变化情况如图2所示。
4.1. 内符合精度
每个断面有几十到上百个定标点不等,每个定标点均有个GNSS潮位值,将其每个定标点潮位值与整个断面GNSS潮位值取平均作对比,共计2759点,统计其误差区间发布情况,见表2所示。
Table 2. Statistical table of internal coincidence accuracy
表2. 内符合精度统计表
通过表2可知,内符合数据统计99.67%互差值小于0.1 m,仅有9个点因大船经过造成的涌浪致使GNSS RTK值偏大,整体来说内符合精度十分可靠,根据现行《水运工程测量规范》以及《水道观测规范》中水位控制测量方面的要求,GNSS三维水深测量成果内符合精度满足要求。
4.2. 外符合精度
试验期间,人工观测潮位采用Hypack中心线法进行数据处理,即按照时间与距离的方式进行内插 [4] ,其准确度相对较高。然后,将每个断面的GNSS平均潮位与人工观测值进行对比分析,其误差分布见图3所示。
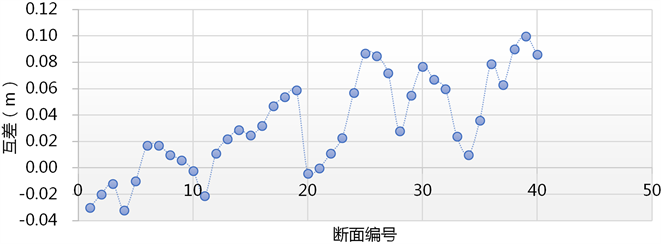
Figure 3. Distribution of RTK Tidal Level and Center Line Method
图3. RTK 潮位与中心线法互差分布图
通过图3对比分析,可知互差均小于等于0.1 m,最大误差为0.09 m,根据现行《水运工程测量规范》以及《水道观测规范》中水位控制测量方面的要求,GNSS三维水深测量成果外符合精度满足要求。
4.3. Hypack不同数据提取对比
本次实验数据中,按照本文2.2.2节中的方法——即基于MNEA-0183大地高和海拔高验潮模式,提取了数据值计算了潮位,与本文2.2.3节中的方法——基于GPS NMEA-0183当地高验潮模式(经过验证对比正确的方法),提取KTC本地正常高作为潮位进行对比分析,互差区间为0.44~0.52 m,可见采用Hypack进行三维水深测量时,要做好检核,采用合适的数据提取与处理方法。本次试验区域如果采用基于MNEA-0183大地高和海拔高的验潮模式就明显出错,也验证了大地水准面差距和我国的高程异常值不具有一致性,故使用国外测量软件时需要做好对比分析工作。两者互差如图4所示。
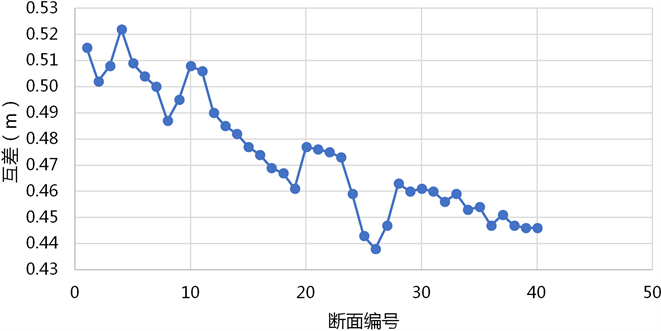
Figure 4. Two different extraction methods of Hypack
图4. Hypack两种不同提取方法互差对比分布图
5. 结语
基于Hypack软件进行GNSS三维水道观测有多种技术与方法,用户可根据当地测区条件,试验出一套合适的作业与数据处理方法。在荆江河段,经过长期的资料积累与试验,可知采用Hypack 2018版软件,合理设置“GPD NMEA-0183”驱动以及大地测量参数,可以获取基于当地高程基准的GNSS潮位值,用于水下高程计算,具有方便快捷、精度高的优势 [5] ,在内河三维水深测量方面具有较高的使用与推广价值。若采用此方式测量,建议如下:
1) GNSS三维水道观测时系统参数至关重要,硬件上需接入姿态改正设备,以获得良好的GNSS潮位值,根据多次试验数据分析,加入姿态仪可以在GNSS潮位的内符合精度上提高50%。
2) 外业生产中,载体测船尽量保持平稳,选择无风无浪或风浪较小的良好作业环境,作业开始前,需对GNSS潮位进行检核与验证,作业期间注意观测信号及采集的数据稳定性。
3) 在数据后处理过程中,同一个断面尽量选择断面平均潮位作为最终断面潮位值,这里需要搭配Hypack软件的后续开发软件,以便于数据处理,这里特别需要注意的是Hypack软件记录的高程信息都是基于GNSS天线相位中心的,后处理需要天线高度改正。
参考文献