1. 绪论
1.1. 背景
根据数据来看,我国近年来的机动车私有量一直稳定在百分之二十左右的年增长率,而相对来说,停车设施的建设水平提高也只有2%~3%,尤其是对于一些大城市来说,机动车私有率的发展速度远超停车设施的更新速度,停车难的问题成了很多大城市十分头疼的问题,所以我们希望通过本文的研究加以解决 [1] [2]。
随着人们生活水平的提高,越来越多的人购买了私家车;从而出现了停车难的问题,也就有了本产品产生的意义。根据现在小区停车难的问题可以看出,对于产品的要求主要有两个方面。在保证可以在有限的地方停放更多的车,解决小区停车难的问题的情况下。第一个方面就是价格问题,传统车库的建造价格远远比立体式车库高,所耗费的时间也长,而且所付出的人力也是很高的成本;第二个方面就是设计及其所体现出的性能,要求停车设备能够达到设计的目的同时、实现尽可能便捷和快速的存取车辆 [3]。
1.2. 现有立体车库
我国现大多采用大型的集中的管理车辆的立体车库,如江苏润邦智能停车设备有限公司研发的升降横移式智能车库,其在并排的三个车位以及附近区域的基础上向上层拓展的,通过控制载车板横向的移动以及纵向的升降,实现对上层车辆的停放与取出。
其缺陷在于,每层必须留出一个车位,来实现车辆的纵向升降,降低了对空间的利用率,且上层车位所停车辆,取车时一次只能出来一辆,越高层的车位停取速度越慢,车库整体的停取效率低。升降横移式智能车库见图1。

Figure 1. Lifting horizontal moving intelligent garage
图1. 升降横移式智能车库
小型家用立体车库方面,几乎都采用直上直下的方式,如唐山通宝停车设备有限公司研发的简易升降类停车装置,通过对地面的深挖,实现一个车位停多辆车,停取车辆时,将整个移动部分,连同所停车辆一同抬起放下。
其缺陷在于,深挖地面提高了立体车库成本,且抬起车辆时,会占用的上方空间,导致空间利用率低下。简易升降类停车装置见图2。
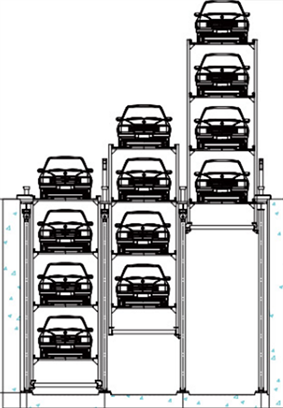
Figure 2. Simple lifting parking device
图2. 简易升降类停车装置
2. 基于曲柄连杆结构的斜向立体停车装置的工作原理与分析
2.1. 结构的组成
笔者研发的基于曲柄连杆结构的斜向立体停车装置主要分为纵向移动部分,斜向移动部分,紧急抱死装置以及框架结构,整体结构如图3所示。
 1,上层车位;2,斜向滑轨;3,纵向滑轨;4,框架结构;5,斜挂板;6,斜向滑块;7,纵向滑块;8,支撑板;9,舵机抱死装置;10,同步轮;11,斜向运动步进电机;12,连杆;13,纵向运动步进电机;14,曲柄;15,绞线轮;16,下层车位;17,下层支撑板;18,舵臂;19,棘轮。
1,上层车位;2,斜向滑轨;3,纵向滑轨;4,框架结构;5,斜挂板;6,斜向滑块;7,纵向滑块;8,支撑板;9,舵机抱死装置;10,同步轮;11,斜向运动步进电机;12,连杆;13,纵向运动步进电机;14,曲柄;15,绞线轮;16,下层车位;17,下层支撑板;18,舵臂;19,棘轮。
Figure 3. Structure diagram
图3. 结构示意图
2.2. 纵向移动部分
纵向移动装置采用曲柄连杆机构如图4所示。
纵向移动部分包括:纵向滑轨3、纵向滑块7、支撑板8、连杆12、安装在框架结构4上的纵向移动步进电机13、曲柄14;其中纵向滑块7安装在纵向滑轨3上,纵向滑轨3共有4根,上方两根平行安装在框架结构4上,下方两根平行安装在下层车位16的下方。
本发明的上层车位1的纵向移动是通过纵向移动步进电机13带动曲柄14,再由曲柄14推动连杆12,连杆12推动支撑板8,使得支撑板8连接的纵向滑块6在纵向轨道3上前后移动,位于下层车位16下方的纵向滑块6同样也在下方的纵向滑轨3上进行前后移动达到上层车位1纵向移动的目的。
本文中所提及的曲柄连杆结构,需要进行计算分析,分析其滑行距离与时间的关系,以及其速度和加速度,验证可行性。曲柄连杆结构原理图如图5所示,曲柄连杆运动分析图如图6所示,公式分析如下:
由图可得滑行距离与时间的关系
 (1)
(1)
且 (2)
(2)
所以
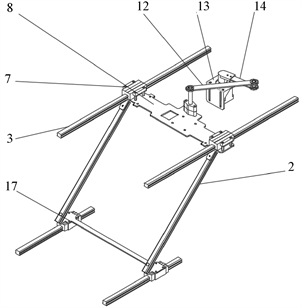
Figure 4. Partial view of how it works
图4. 工作原理局部视图
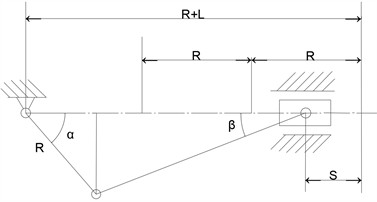
Figure 5. Crank connecting rod principle
图5. 曲柄连杆原理
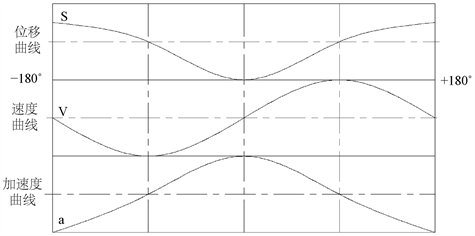
Figure 6. Motion analysis of crank connecting rod
图6. 曲柄连杆运动分析
 (3)
(3)
所以
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
滑块运行距离为:
 (8)
(8)
 (9)
(9)
滑块速度为:
 (10)
(10)
滑块加速度为:
 (11)
(11)
2.3. 斜向移动部分
斜向移动装置如图7。
斜向移动部分包括:安装在支撑板8上的斜向移动步进电机11、同步轮10、绞线轮15、斜向滑轨2、斜向滑块6、下层支撑板17;其中斜向滑块6安装在斜向滑轨2上,两根斜向滑轨2相互平行,且与地面成45˚夹角。
上层车位1的斜向下移动主要采用斜向滑块6带动其滑动来实现。由安装在支撑板8上的斜向移动步进电机11带动同步轮10,两个同步轮10位于支撑板8上下,由同步带传动,再由同步轮10带动在固定在光轴上的绞线轮15,绞线轮15上的绳索另一端固定于上层车位1两侧的斜挂板5,绞线轮15通过对绳索的收放,带动斜向滑块6沿斜向滑轨2进行滑动,上层车位1就以沿着斜向滑轨2方向做斜向的运动,实现上层车位1的斜向移动的目的 [4]。
2.4. 紧急抱死装置
紧急抱死装置如图8。
紧急抱死部分为舵机:抱死装置9,舵臂18,棘轮19;其中舵机抱死装置9安装在支撑板8上,舵臂18安装在舵机抱死装置9上。
当突发断电等情况时,舵机抱死装置9检测到断电,电机故障等情况,舵机抱死装置9转动带动舵臂18转动,舵臂18卡住棘轮19从而斜向运动停止。人为按下紧急制动按钮时,也会启动该装置。
抱死装置的使用增强了立体停车装置的可靠性,同时保证了停车装置,车辆以及人员的安全,在检测到断电时,由备用电源驱动的舵机立刻运作,通过棘轮棘爪的配合卡死同轴的绞线轮,停止电机转动带动的绞线轮对于绳索的收放,如果遇到突发情况 [5],人为判定有危险事件发生的可能性,可以按下立体停车装置旁的紧急制动开关,舵机立即运作,对斜向运动的设备进行抱死,保证人员以及财产安全。
2.5. 框架支撑结构
框架支撑结构如图9。
由可拆卸式钢材进行搭建,钢材伸入地下,增加了整体结构的稳定性,由可拆卸式的钢材进行搭建,方便安装与拆卸,框架结构结实可靠,并且可以实现并排安装与背对安装,极大的增强了对于空间的利用率,钢材有伸入地下的部分,保证整体的车库不会滑动,最大限度的减小晃动,保证了停车装置,车辆以及人员的 安全,适合于老旧小区的停车位改造 [6]。
3. 主要零部件的静态载荷分析
立体停车装置里面的结构很复杂,在进行非动态的承载能力分析时,主要分析承重的斜挂板和处在下方的支撑板,接这两样零件对于一个立体停车装置来说可以说是最核心的支撑零件,他们的质量关系着整个设备的受力情况以及正常运行。笔者认为主要分析它们的应力和位移 [7],第一步是将复杂的模型简略。在这次中忽略焊接的结实程度以及焊缝的高度对于这次分析的影响(见表1)。

Table 1. Material properties of slant hanging plate and lower support plate
表1. 斜挂板和下层支撑板的材料属性
在本文中,连斜挂板和底板支撑板的所有层次都受到限制。底板和底板支撑板在最大载荷条件下进行分析,即分析板和下支撑板在载荷下的应力和变形充分根据该板的最大力的计算是5000 pa并且支撑板的力低至6000 pa [8],考虑到该装置在实际操作期间将受到环境的影响。该装置安全可靠 [9]。装载板的应用如图10所示。基本支撑板的装载如图11所示。
在Solidworks Slimulation模块中,分析组件的集成和计算由软件本身执行,并提供详细信息。工作完成后,Solidworks Slimulation模块将自动开始计算和分析零件以创建研究结果。从应力图和位移图可以看出当最高值出现在连接位置时,结构和变形以及在另一个位置的力分布是相当一致的 [10]。可以看到分析的主要数据。由斜挂板引起的应力如图12所示。位移如图13所示。从研究结果如表2所示:最大位移0.00493746 mm,最大应力1.78314e + 006 N/m2,设计满足材料的许用强度;下层支撑板的应力输出如图14所示,位移如图15所示。下层支撑板分析结果(见表3)为:最大位移0.00125493 mm,最大应力1.69174e + 006 N/m2,设计满足材料的许用强度。因此,在正常工作下,斜挂板和下层支撑板的可靠性和稳定性可以保证。
Table 2. Static load analysis results of slant hanging plate
表2. 斜挂板的静态载荷分析结果
Table 3. Static load analysis results of lower support plate
表3. 下层支撑板的静态载荷分析结果
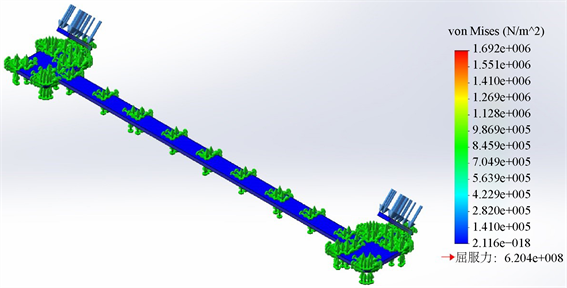
Figure 14. Stress diagram of lower support plate
图14. 下层支撑板应力图
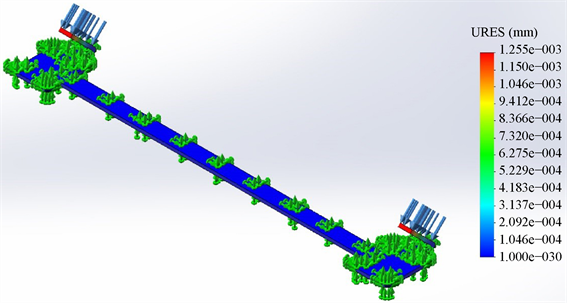
Figure 15. Shift diagram of lower support plate
图15. 下层支撑板位移图
4. 实际使用
在实际使用过程中,本发明在实际使用过程中,用户控制上层车位的进出与升降,当用户需要停车时,上层车库先进行纵向移动,再进行斜向运动,车辆停到指定位置后,传感器接收到信号装置才会进行放车运动。当用户取车时,如果检测到下层车位没有停放车辆则直接进行斜向运动,将上层车位运到地面,如果下层车位有车,则先进行纵向运动,再进行斜向运动。当取车时,如果检测到上层车位下方有人或异物,将会暂停运动。
整个停车取车操作流程(图16)方便快捷,车主只需等待片刻,便可以实现整个停车过程。归位之后车主可以取消使用APP,停车装置归位。
5. 试验与验证
模拟测试样例
经过对样机模型(图17和图18)试验,该装置运行平稳,无干涉,安全可靠,符合用户日常使用需求。可以方便的取车停车,使用简单快捷,有效缓解停车难问题。
6. 结束语
通过对基于曲柄连杆结构的 斜向立体停车装置的设计,实现一个2.7 × 5.5米的车位停两辆车,采用由曲柄连杆控制纵向移动、由步进电机控制的斜向45˚移动、由舵机控制的棘轮棘爪急停、手动急停。由上层电机带动同步轮,通过对绳索收放,带动载车板。结果表明:零部件在工况下的最大受力小于设计许用应力,完全满足强度要求,节约空间,提高空间利用率,制造运行成本低,适合推广使用。
基金资助项目
2018年大连工业大学教育教学改革研究项目(教发[2019] 23号),资助编号:JGLX2018040。
参考文献
NOTES
*通讯作者。