1. 引言
揭示交流中所蕴含的复杂非线性行为(分岔、混沌等)是人们长期关注的重要课题。研究发现分岔是交通流中各种非线性因素耦合影响的重要表现形式:当系统中某些参数发生变化越过某个临界值时,交通流系统的拓扑结构发生变化,诱发均匀流与堵塞流之间相变。目前,对交通流中的分岔等复杂现象的研究大多集中在车辆跟驰模型,详见文献综述 [1] [2] 及其中参考文献。
值得一提的是,文献 [3] 提出如下具体模型
(1)
其中
,
为两车之间的实际存在的安全间距,
分别为车队中车辆的位置、速度及加速度;
为相邻两辆车之间的车头间距,
为驾驶员延时反应时间,一般为0.4~1.6秒,
分别表示对车速变化和车头间距变化的反应灵敏度系数。同时还分析由3辆车组成的系统的稳定性及其Hopf分岔特性,揭示了不同的系统时滞量(驾驶员反映时间)和不同的安全间距对系统稳定域的影响。
本文将揭示时滞所引起的系统多稳定性、高余维分岔等,并提出了一类新的非线性模型,模拟了混沌交通流等复杂动力学行为。
根据现有文献,多稳定性(Multistability)是生物学家Kenneth W. Nicker-Son在讨论多稳定蛋白质的生物功能时提出来的 [4]。该词现已在多个领域广泛应用,如声光非线性系统、学习算法、神经网络模型、寡头经济模型、人口模型以及传染病动力学模型的多稳定性研究等。从动力系统角度看,多稳定性是指系统多个平衡点或/与多个周期解(极限环)、多个混沌吸引子的同时存在性。系统最终的运动形式往往与系统地最初状态(初始条件)有关:初始条件不同,而最终的状态不一样(相空间中存在多个吸引子和相应多个吸引域)。这是复杂系统普遍存在的一种现象,如(高维或无穷维)系统中因多种分岔现象而出现多个平凡吸引子或(与)混沌吸引子的同时存在性,以及混沌映射中存在的无穷多周期层次结构等。而本文将揭示时滞车辆跟驰模型同样存在此类现象。
当Li ≡ L时 [3],可理解为同质结构,即单一车道上跟随车辆与首车车况、车型相同;而当Li互异时系统为异质结构,即单一车道上跟随车辆与首车车况、车型不同,鱼龙混杂。
2. 模型描述与多稳定性分析
假设车队中车辆数 ,并设头车以某一速度匀速前进,即
,则模型(1)可写成如下四维非线性自治时滞动力系统形式:
,并设头车以某一速度匀速前进,即
,则模型(1)可写成如下四维非线性自治时滞动力系统形式:
(2)
其中
,
同时我们还将观察到如下系统存在的混沌交通流及其多稳定现象:
(3)
由文献 [3] 或直接计算可知,系统平衡点为
,时滞临界值为
其中
当时滞
系统不稳定,当时滞
系统在平衡点附近局部稳定。
进一步验证Hopf分岔的横截性条件,可计算得当
时
及
 (a)
(a) 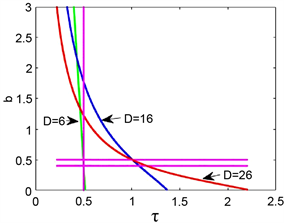 (b)
(b)
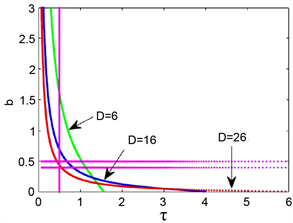
Figure 1. Critical values of losing stability by (double) Hopf bifurcations in system (2) as b varies and a is fixed
图1. 当b变化而a固定时,系统(2)中的(双)Hopf分岔失稳的临
 (a)
(a) 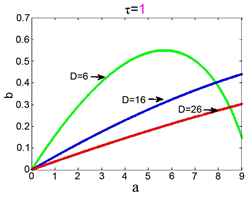 (b)
(b) 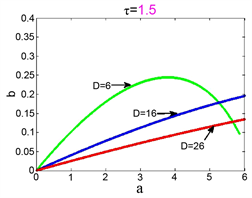 (c)
(c)
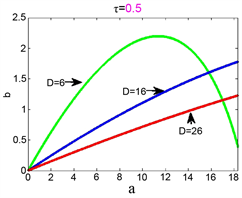
Figure 2. Critical values of losing stability by (double) Hopf bifurcations in system (2) as τ varies
图2. 当τ变化时,系统(7.2)中的(双)Hopf分岔失稳的临界值
图1画出了当参数a固定后中临界时滞与参数b及车间安全距离的相互影响。观察分析可知:有时较小的车间安全距有较高的稳定性,而有时较大的车间安全距才有较高的稳定性。之间的转化(临界状态)可用多稳定性或高余维分岔来解释。这里主要表现为双Hopf分岔。如图1(b)所示当a = 18.3时Li = D = 16所对应的临界曲线与D = 26所对应的临界曲线在b = 0.5附近相交,从而若所给系统中L1 = 16,L2 =26,则在对应两曲线交点邻域出现双Hopf分岔。类似现象也可以在图2中其它参数值所对应的临界曲线交点处观察到:D = 6所对应曲线与另外两曲线均相交。因此若系统(2)或(3)中L1 = 6,L2 = 16 (或26),则在两曲线交点处出现双Hopf分岔。从另外一个角度说明了这种高余维现象的普遍存在性。比较图2中三幅图(τ = 0.5, 1, 1.5)还可发现,随着反应时间增长,参数平面上稳定域范围大幅缩小,从而说明驾驶员的快速反应有利于系统安全性能的提高。
图3从数值的角度验证了Hopf分岔所满足的横截性条件,并且由所给数值值(>, =或<0),说明图1与图2中所画临界曲线的内侧区域稳定,外侧不稳定,与已有理论分析及数值结果吻合。
3. 进一步分析
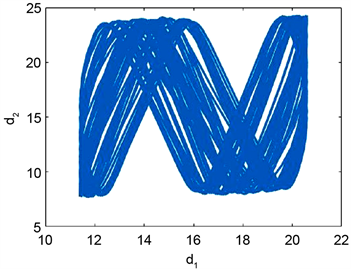
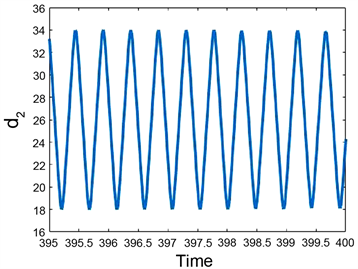
文献 [3] 已指出模型(2)中很难数值观测到稳定的极限环。为此我们研究方程(3)。在图4中取
, a=6, b= 0.8,τ=0.99, k=0.08及初值
,
。即设在开始
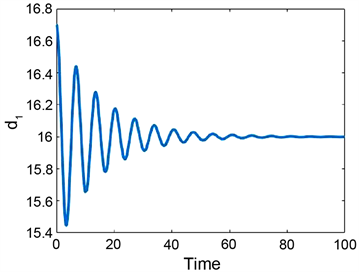
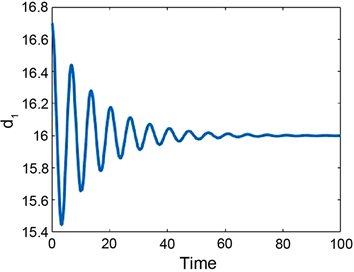
时间段内,第1、2辆车和第2、3辆车之间的车头间距分别为16.7 m和17.9 m,相对速度差均为0.01 m/s。从图4的仿真计算结果可见,系统出现了混沌交通流。图5比较了模型(2)与(3)之间动力学差异,其中L1 = 16, L2 = 26 m,初始值与图4同。前者(L1 = 16)对应子系统参数位于稳定域内,而后者参数位于不稳定域。我们看到了均匀流与周期流的同时存在性。两系统(2)与(3)均出现同样现象,但频率有很大差异。可归结为车辆加速的差异,前者为低速情形,而后者为高速情形。但需要进一步运用非线性动力系统方法解释相应机理。而关于此类多稳定性现象,文 [3] 没有研究讨论。
 (a)
(a) 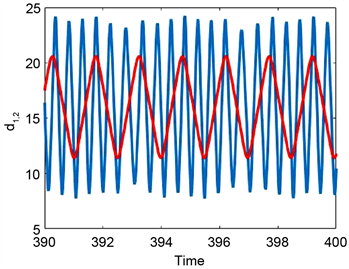
 (b)
(b)
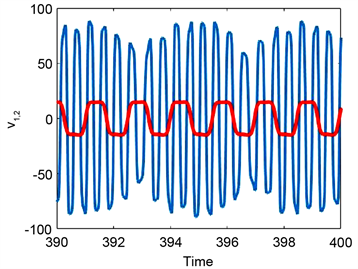
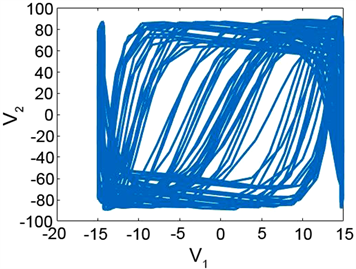
Figure 4. Chaotic behavior in system (3) with a = 6, b = 0.8, L1 = 16, L2 = 16, τ = 0.99,k = 0.08 under the initial condition
,
. (a) Time series; (b) Phase portrait
图4. 系统(3)中的混沌行为在初始条件
下,a = 6,b = 0.8,L1 = 16,L2 = 16,τ= 0.99,k = 0.08,
。(a) 时间序列;(b) 相图
 (a)
(a) 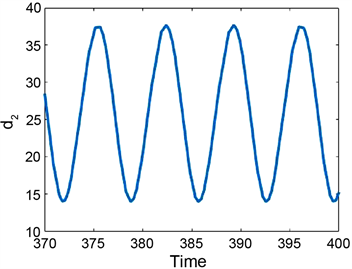
 (b)
(b)
Figure 5. Multistability in system (2) and (3) for a = 6, b = 0.8, L1 = 16, L2 = 26, τ = 0.3 under the initial condition
,
. (a) System (3.2), k = 0; (b) System (3.3), k = 0.08
图5. 系统(2)和(3)中的多稳态性,其中a= 6, b =0.8, L1 = 16, L2 = 26, τ = 0.3,及初始条件
,
。(a) 系统(3.2),k = 0;(b) 系统(3.3),k = 0.08
4. 结论
本文发现了一类时滞交通流模型中存在的多稳定性现象,并提出一类新的非线性模型,模拟了混沌交通流等复杂动力学现象。尽管模型(3)可以看成模型(2)的高阶扰动模型,在适当条件下均可诱发均匀流与堵塞流的相变,但周期震荡频率有很大差异,需要进一步运用非线性系统理论加以研究。
本文没有深入分析混沌这一重要非线性特征,可以通过考察初值敏感依赖性及计算最大Lyapunov指数与分形维数等加以验证,文 [5] 的研究方法提供了很好的参考。通过数值模拟揭示了系统高余维分岔(双Hopf)的存在。进一步进行理论分析,是一个有趣的课题。由于其高维特性,相应动力学行为分析有难度。运用时滞微分方程理论 [6] [7] [8] [9],揭示交通堵塞背后的各种非线性现象产生的内在机制,如交通拥堵的形成和演化机理,以及交通堵塞的分类等问题,将是我们今后研究的重点。
基金项目
山东省自然科学基金资助(ZR2015AL004)及国家自然科学基金资助(No. 61977004)。