1. 研究背景
城市化的快速推进和经济的迅猛发展以致城市路网交通量日益剧增,由部分交叉口的拥堵演变成区域交通拥堵成为当前我国城市面临的亟待解决的常态性问题。究其原因,以往单点、静态信号控制无法根据实时车流量进行信号动态配时,再加上整个路网拓扑结构特别复杂,无法找到切入点。因此需要从交通网络系统中分析各要素的相互作用和运作机理,将整个路网系统划分子区,在子区内进行协同控制。
国内外学者对城市路网子区划分各有见解,采用了不同的划分依据。沙志仁等 [1] 通过考察不同子区数量下的全路网交通运行离散度,得到最优的路网子区数量及相应的划分方案。卢守峰 [2] 等针对传统K均值聚类算法在非均质路网划分应用中的不足,将路网连接性融入算法,解决其在路网划分应用中聚类结果不连续问题。在区域协调控制研究上,国内外学者大部分采用的是单点与单点间的协调控制方案。赵靖 [3] 等通过研究基于宏观基本图的概念,建立了控制子区间驶入驶出交通量的协调控制模型。张逊逊 [4] 等提出基于MFD (Multiple Functional Displays)的多子区协调控制策略,建立了基于MFD的多子区交通流模型,并给出了对各子区交通流诱导时的边界约束条件。
因此本项目将着重研究智慧子区动态划分与智慧子区内协同控制理论,提出了以“关键路径”为核心、次关键路径与非关键路径为辐射影响的智慧子区划分算法和先主后次的“线–轴”协同控制算法。
2. 设计原理
2.1. 设计思路
本设计本着“以人为本,高效治堵”的理念,运用“数形结合”的理念,以“关键路径”为核心,次关键路径和非关键路径为依据建立了智慧子区动态划分算法。在智慧子区内部,按照路径的关键程度依次优化,建立了“线–轴”协调控制优化算法。主要涉及到视频检测技术、数据库技术、路径关联度指标、划分可视化技术、协同控制优化算法,其研究内容整体框架如图1所示。
2.2. 研究内容
2.2.1. 交通数据改善与数据库的建立
通过视频检测器技术捕获到的数据需要经过处理、修正后才能使用,因此建立交通数据改善算法,如图2所示。通过孤立点检测、边缘检测等方案将错误数据判别,并用灰色模型与最小二乘法进行修正,然后将修正后的数据导入到交通数据库中。数据库采用MySQL平台,使用PDO接口获取数据,通过函数执行查询数据。整套数据库系统在MyEclipse集成环境中开发,搭建了由Java语言编写的Tomcat服务器。客户端与PC服务器交互,满足跨平台传输数据格式标准要求。
2.2.2. 智慧子区动态划分与可视化
研究发现,城市区域路网具有OD路径交通流分布明显的特征,建立OD路径指标模型进行计算,得出OD分布特征最明显的一条,即对路网交通状态具有显著影响的路径。在该OD区间内,有K条可行路径供交通出行,利用基于离散性、阻滞性的路径关联度指标进行计算,将关联度最大的定义为关键路径,设置阈值,然后选取次关键路径与非关键路径。智慧子区划分算法如图3所示。
1) OD路径关联度指标
假设某一时段局部路网上的交通生产点集合为O,维度m,交通吸引点集合为D,维度为m,任意OD对之间的流量为
,则局部路网交通流动态OD矩阵为
,P为局部路网上某一OD对之间全部OD路径的集合,L代表局部路网上全部连线的集合。则连线流量
和路径流量
之间的关系为:
(1)
则两个路口关联度指标为:
(2)

Figure 2. Traffic data improvement flow chart
图2. 交通数据改善流程图
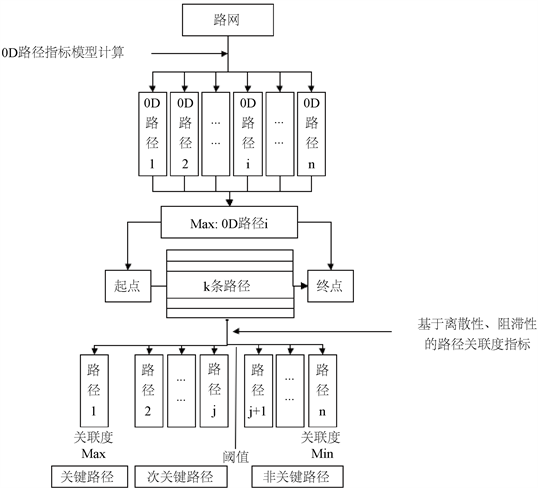
Figure 3. Wisdom sub-area dynamic partitioning algorithm
图3. 智慧子区动态划分算法
2) 基于离散性、阻滞性的路径关联度指标
a) 离散性
假设车队在路径开始时车头时距为
,行驶车辆仅受车队离散因素影响,到达路径末端平均车头间距变为
,那么
,
,其中,
为路径起点的平均流率,
为路径终点的平均流率。定义离散性关联指标为途径等宽绿波带时路径起、始点理想车队车辆数的比值,即:
(3)
其中:
(4)
式中:
为离散性关联指标;
为路径起点第i辆车的车头时距(S);
为车队在路径终点第i辆车的车头时距(S);
为车队在绿灯通过路径起点的车辆数(pcu);
为车队在绿灯通过路径终点的车辆数(pcu)。
b) 阻滞性
对于交叉口群内某条路径的路段m,顺着该路径方向的路口进口到如果有N条车道,则每个功能区的功能长度为:
(5)
式中:
为路段m第n条车道的功能区长度(m);
为路段m第n条车道的车队排列长度(m);
为减速距离(m);
为感知–反应距离(m)。
若该路径由M个路段组成,则其阻滞性指标
为:
(6)
3) 智慧子区划分可视化
数据为交通疏解方案提供定量化引擎,决策优化还需要直观的图形信息,以及对未来交通态势的预测能力。调取MySQL数据库中的交通数据,设定一个构造器,编写HighChart动态图机器语言实现数据可视化处理,实现“数形结合”的控制子区智慧划分。
2.2.3. “线–轴”协同控制
交通拥堵是制约城市发展的主要因素,将城市路网动态划分成智慧子区,在子区内提高交通信号系统的控制效果是缓解城市交通拥堵问题的有效途径。对于智慧子区来说,子区内关键路径的通行效率直接影响子区内的交通是否通畅,因此本项目将城区关键路径定义为“轴”,次关键路径定义为“线”,研究“线–轴”之间的相互作用。
根据关键路径间车流输入输出关系和路径特征 [5],建立以“关键路径”为核心的“线–轴”协同控制优化模型,如式7所示,以车流量权重最大为约束条件,如式8所示。
(7)
(8)
式(7)中:
——第i个轴的第k个路口周期开始至协调相位开始之前的时间;
——第i个轴的第k个路口的相位差(方案中输入的相位差);
:旅行时间(第k个路口到第k + 1个路口的行驶时间);
——第i个轴的第k条线的第k − 1个路口周期开始至协调相位开始之前的时间;
——第i个轴的第k条线的第k − 1个路口的相位差(方案中输入的相位差);
:旅行时间(第k − 1个路口到第k + 1个路口的行驶时间)。
式(8)中:qjn为j方向上路口n的流量,其中j为车流流向,j = 1为正向流向,j = 2为反向流向;N为协调路口总数;Qikj——第i个轴的第k个路口j方向上的流量权重,即流量权重最大,车流量越高。
为验证“线–轴”协同控制算法的工作效率,利用C++编程语言,对vissim仿真软件进行二次开发,融合“线–轴”协同控制算法。从vissim中布设的各检测器收集实时交通信息反馈到算法中,并将算法的最新控制方案反馈到vissim仿真环境中,对收集到的通行量数据进行分析计算,发现实施本设计控制方案后区域内平均通行量提高了约7.15%。
3. 结论
为缓解城市大面积交通拥堵问题,提升道路网络整体运行水平,本文提出了基于“数形结合”的智慧子区划分及“线–轴”协同控制算法,主要结论有:
1) 利用离散性、阻滞性指标建立的路径关联度模型与OD路径进行比拟,确定关联度阈值,建立子区划分算法进而将路网划分成实时动态的智慧子区。
2) 将“线–轴”协同控制算法类比为“水系疏导”策略运用到路网交通疏通上,在子区内按照路径的关键程度依次优化相位相序,直至整个子区路网优化完毕。
3) 仿真结果表明,所设计的基于“数形结合”的智慧子区划分及“线–轴”协同控制算法,能对各子区交通流进行有效诱导,区域路网的平均通行量提高了约7.15%。
4. 前景展望
在物联网、人工智能等新技术兴起之际,城市智慧交通行业随之快速扩容,国家大力扶持智能交通产业的发展。检测器检测技术支撑良好,检测正确率已达96.3%。且协调式智能控制机普及应用广泛,信号中心控制软件接入算法系统技术成熟。大多数城市的交通管理部门均已成立智能交通指挥中心,并具有专门交通管理人员解决技术性问题。
本设计投入金额少,效益高,切实解决城市拥堵问题,极大减少了废弃排放。随着智慧交通的普及,城市交通智能控制越来越广泛。通过系统工作原理的推广,本设计还可以研究智慧子区与智慧子区间的运作机理,真正落实“以人为本、高效治堵”。