1. 引言
随着“物联网”、“互联网+”、“车联网”技术的发展,实现了交通数据的全面感知,使现代交通进入交通大数据的大发展时代。人们发现将互联网科技带入交通系统中对交通进行管理和控制能够起到良好的效果,对改善城市交通拥堵问题和提高城市交通系统的运行效率起到积极的作用。在此背景下,智能交通系统(ITS)逐渐成为交通领域研究的热点和重点。
智能交通系统(ITS)是将现代通讯、信息、控制、传感以及计算机等技术融合并有效地使用于交通系统中,从而打造的具有良好的实时性、准确性、高效性的城市交通管理系统 [1]。城市交通控制系统(UTCS)和城市交通诱导系统(UTFGS)是智能交通系统的核心,交通控制系统通过管理手段,协调交叉口各信号相位的绿灯时间,对路网流量进行再分配,以提升路网的通行能力和改善交通状况。交通诱导系统是通过向出行者发布描述型或诱导型的交通信息,实现对出行者路径选择的影响,从而对整体的路网流量分布进行优化,避免因车辆“扎堆”而引起交通拥堵。交通控制系统和交通诱导系统两者既相互联系、缺一不可,又互相独立、各有侧重 [2],交通诱导控制协同系统能够整体上有效地优化路网流量在时空上的分布,以达到最佳的管理效果。因此,研究移动互联交通信息下的城市交通诱导控制协同方法,对改善城市交通环境,提升路网运行效率,建设绿色城市以及促进城市经济发展具有十分重要的意义 [3]。
2. 出行者路径选择行为调查与分析
2.1. 出行者路径选择行为调查
2.1.1. SP调查问卷设计
(1) 影响因素调查
① 个人属性。包括:年龄、年收入、受教育水平、驾龄、对路网的熟悉程度等;
② 出行特性。包括出行目的、出行耗时、出行次数等;
③ 信息属性。包括对VMS的关注程度、对VMS信息准确度的评价、偏好的VMS发布信息的形式等;
④ 改变路径倾向。包括改变路径考虑的主要因素、何种情况下关注诱导信息等。
(2) 假设情景调查
假设情景中,当原计划路径a发生交通拥堵后,调查VMS发布三种不同的诱导信息:“路径a拥堵,路径b通畅”、“路径a——6公里,25分钟;路径b——8公里,20分钟”、“路径a——6公里,30分钟;路径b——8公里,20分钟”对出行者路径选择的影响。假设情景示意图如图1所示。
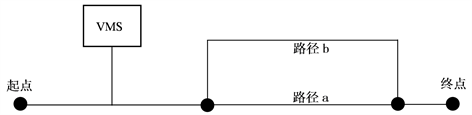
Figure 1. Hypothetical scenario diagram
图1. 假设情景示意图
2.1.2. 调查描述
为了获得足够的样本量,本次调查以网络调查和实地调查两种方式进行。实地调查的时间为2019年11月23日(周六),地点为桂林市中心广场,对出行者当面进行访问与填写问卷。
2.2. 路径选择行为模型
模型的因变量是出行者是否改变路径,自变量包括:年龄、收入、受教育水平、驾龄、路网熟知程度、出行目的、出行耗时、出行次数、VMS信息准确度、VMS信息表达类型、VMS关注程度、改变路径的影响因素这12个因素。
本文运用SPSS 22.0软件,采用二元Logistic回归分析对12个影响因素进行检测、剔除。在回归分析中,以显著性0.25作为筛选自变量的标准,剔除显著性大于0.25的自变量,置信度水平采用SPSS软件默认的95% [4]。最终得到4个显著性小于0.25的自变量:驾龄、VMS信息准确度、VMS关注程度、改变路径影响因素。结果如表1所示。

Table 1. Logistic regression parameter estimation results
表1. Logistic回归参数估计结果
将筛选后留下的自变量的回归系数和常数项代入Logit模型中,建立诱导信息下出行者路径选择概率模型:
(1)
模型中各自变量对应的解释如表2所示。
Table 2. Correspondence of independent variables
表2. 自变量对应关系
2.3. 模型分析
假定其余自变量固定,对模型中的变量进行单因素分析 [5]。
(1) 驾龄的影响
驾龄的回归系数为−0.144,说明驾龄越大,出行者改变路径的概率越小,其OR值为
,表明出行者不更换路径的概率随驾龄每增加1年而增大0.155倍。
(2) VMS准确度的影响
出行者认为VMS准确度较高和认为VMS准确度一般的OR值分别为
、
,即认为VMS准确度较高和认为VMS准确度一般的出行者改变路径的可能性分别是是认为VMS准确度较低的3.970倍、3.133倍。表明VMS准确度越高,出行者依从诱导信息更换路径的可能性越高。
(3) VMS关注程度的影响
在出行者中,对VMS关注程度较高和关注程度一般的OR值分别为
、
,即对VMS关注程度较高和关注程度一般的出行者改变路径的可能性分别是关注程度较低的4.446倍、3.0117倍。说明出行者对VMS关注程度越高,受诱导信息的作用越大,更换路径的可能性越高。
(4) 改变路径选择因素的影响
模型中出行者受行驶时间影响的OR值为
,受行驶路程影响的OR值为
,即出行者受行驶时间因素影响而改变路径的可能性是其他因素的3.888倍,受行驶距离因素影响而改变路径的可能性是其他因素的3.264倍,说明出行者在出行中受到行驶时间和行驶距离的影响较大,改变路径的可能性也更大。
2.4. 对制定交通诱导控制协同策略的启示
交通诱导控制协同管理策略分为动态控制策略和动态诱导策略,动态交通控制策略是通过优化信号配时方案对交叉口车流进行管理,动态交通诱导策略的内容主要分为两部分:如何有效对交通流进行诱导、对路网交通流的均衡分配 [6]。路网交通流均衡分配可通过算法求得,而要达到对出行者有效诱导的目的,则要通过管理者的诱导手段。交通诱导信息对出行者在途中的路径选择行为有较大的影响作用,因此,基于本次对出行者在移动互联交通诱导信息下的路径选择行为研究的分析,对如何有效的诱导交通流可得到如下启示:
(1) 交通管理者通过VMS发布诱导信息时,应及时准确地更新诱导信息,提高出行者对VMS诱导信息的满意度和信任度,避免诱导信息与实际情况存在较大误差,导致出行者降低对VMS诱导信息的信任度,对交通诱导系统发挥诱导作用产生消极影响。
(2) 根据假设情景调查分析结果,VMS在不同情况下发布不同类型的诱导信息能够起到不同程度的诱导效果。因此,交通管理者通过VMS发布诱导信息时,可根据路段的实际行程距离、预测得到的行驶时间和其他路网情况,选择对出行者发布描述型诱导信息还是预测型诱导信息,以最大限度地提高出行者对诱导信息的依从性,达到最佳的诱导效果。
(3) 根据路径选择模型的分析结果,出行者对VMS交通诱导信息的关注程度越高,其依从诱导信息进行改变路径的概率越大,诱导效果越显著。因此,交通管理者可通过公众号、车载广播、政府平台和论坛等途径提高出行者对VMS的认知和关注,进而提高出行者对VMS诱导信息的接受度和使用率,提高VMS的诱导效果,改善路网车流分布的均衡性。
3. 交通控制与交通诱导协同模型
本次建模的核心思想是以交通控制和交通诱导手段对路网上的交通车流进行调整,优化路网交通流在时空上的分布,以缓解局部区域路网范围内的拥堵,降低路网的总行程时间,提高路网的通行效率 [7]。因此本次建立的协同模型以行驶时间与延误时间之和的总行程时间作为模型的目标函数,以路网流量、流入率、绿信比为模型的变量,并对变量进行约束。
3.1. 路段行驶时间计算模型
路段的行驶时间是行驶路程与行驶速度的比值,可通过下式计算:
(2)
式中:L——路段上游交叉口出口20米到当前交叉口停车线前100米的距离;
V——路段车辆的平均行驶速度;
L可通过现场测量得到。V的表达式为:
(3)
将公式(3)代入公式(2)得到路段行驶时间公式:
(4)
3.2. 交叉口延误模型
本次研究中采用HCM手册(1985版)延误模型对延误进行计算,其计算公式如下:
(5)
式中:C——信号交叉口周期;
——绿信比;
X——饱和度;
S——信号交叉口饱和流量。
式中第一项为车辆均匀到达交叉口产生的均匀延误,第二项为增量延误,由车辆的随机到达产生。
3.3. 协同模型的建立
综上所述,以路网总行程时间(行驶时间与延误时间之和)作为模型的目标函数,通过对流量、绿信比、饱和度等参数进行约束,建立如下协同模型:
(6)
3.4. 协同模型的遗传算法设计
遗传算法是Holland教授模拟达尔文生物进化论的算法,该算法是基于适者生存原则模拟自然进化过程搜索模型最优解的方法。通过对变量进行编码得到一组候选种群并测算种群的适应度,根据适应度基于优胜劣汰、适者生存的准则得到模型的近似最优解,将得到的新种群进行复制、选择、交叉、变异得到新的近似最优解,对新的近似最优解循环重复以上过程,最终得到模型的最优解 [8]。
在遗传算法中,将模型的目标函数转化为适应度函数,对模型中的种群进行适应度测算。本文中建立的模型是求最小值的优化问题,将目标函数处理并转换后的适应度函数如下:
(7)
惩罚函数可通过惩罚不可行解将有约束模型转为无约束模型。求最小化的非线性规划问题时,采用加法形式构造进化函数,惩罚项由变量惩罚因子和对违反约束的惩罚构成;求最大化的非线性规划问题时,采用乘法形式构造进化函数。在本文中要解决的问题为最小化有约束问题,可以利用惩罚函数将最小化有约束问题转化为最小化无约束问题:
(8)
式中:
——惩罚因子,为较大正数。
相应的
惩罚项为:
(9)
式中:
——约束条件中的不等式约束;
——约束条件中的等式约束。
4. 实例应用分析
为了验证本次研究中交通诱导控制协同模型的可行性,本文针对一个包含四个交叉口的局部区域进行分析,路网示意图如图2所示。
为了简化计算,对路网中的以下数据进行假设:
(1) 路网中的交叉口信号控制相位均为两相位;
(2) 交叉口信号周期为固定周期,交叉口1、交叉口4周期取60 s,交叉口2、交叉口3周期取80 s;
(3) 路网中道路的最大饱和度为0.4,最大饱和度方差为0.05;
(4) 路网中道路的车辆最大驶入率为1辆/s;
(5) 车流自由流行驶速度为22.3 m/s2,路段阻塞密度为0.131辆/m。
(6) 1-3、3-1、2-4、4-2的OD需求为0.4辆/s。
(7) 驶出率与流量的转化值为0.025。
路网中的道路均为双向道路,其基础数据如表3所示。
将协同模型中的参数分别用实验数据和x代替,将决策变量流量
用
,
,
,
,
,
,
,
表示,流入率
用
,
,
,
,
,
,
,
表示,绿信比
用
,
,
,
表示。参数变量与x的对应关系如表4。
利用Matlab软件中的遗传算法与直接搜索工具箱求解模型,最终得到的最优解如表5所示。
求解得到的适应度函数最优值为:1110.2 s。将基础数据中的流量、驶入率和绿信比代入目标函数公式计算得到优化前路网的总行程时间为:1257.7 s,优化后的路网总行程时间为:1110.2 s,优化后的总行程时间相比优化前降低了11.7%。因此可知,本文设计的交通诱导控制协同系统对路网交通状况起到了一定的优化效果,对提高路网性能具备一定的可行性。
Table 3. Road network basic data sheet
表3. 路网基础数据表
Table 4. Correspondence between parameter variables and x
表4. 参数变量与x对应关系
5. 结语
本文通过对移动互联交通信息下出行者的出行路径选择行为进行了SP调查,并建立了出行者路径选择的Logit模型,对路径选择的影响因素进行了分析。根据研究结果,当VMS交通诱导信息的准确度以及出行者对VMS诱导信息关注度越高时,出行者的诱导依从性越高;在途出行者对出行路径进行决策时,首先考虑行驶时间,其次是行驶距离,因此,管理者通过VMS发布诱导信息时,应结合路网的实际情况决定发布指示型诱导信息或是预测型诱导信息。以路网的总行程时间最小为目标函数,以交通量、驶入率、绿信比为约束条件,建立了交通诱导控制协同模型,利用遗传算法对模型进行求解并进行实例应用分析,优化前后的路网总行程时间对比分析结果表明,优化后的路网总行程时间相比优化前减少了11.7%,说明交通诱导控制协同模型具备一定的可行性,能够有效地提升路网的性能。