1. 引言
导航系统作为现代军事武器装备关键部件,其导航精度和可靠性决定了导航任务是否能够顺利完成和作战任务完成的速度和质量。为提高导航系统的性能,满足舰船长航时、远航程导航需求,并降低对卫星导航的依赖,各国引入星光导航与惯性导航进行组合构成无源组合导航系统,经过四十余年星光导航技术迅速发展。在应用领域方面迅速的从航海六分仪、水下潜望镜发展到航空航天使用的机载、卫载星体跟踪仪,星光导航设备的性能也不断得到提高,由带伺服机构的小视场星体跟踪器发展到大视场、高动态、高精度、全自动、全天候、小型化、全球昼夜的捷联使用星光导航系统 [1] [2]。因此惯性/星光构成的组合导航系统具备高精度、高可靠性、自主性和隐蔽性的特点,极大提高舰船的生存能力。但是惯性设备必须依靠初始位置信息完成对准,惯性/星光组合系统可正常工作。为了提高舰船的快速响应能力,本文研究惯性/星光组合系统海上动态对准方法,利用滤波数据融合手段,实现了惯性/星光高精度对准。
2. 组合系统动基座对准
当舰船在系泊状态下,惯性/星光组合导航系统利用已知的码头位置信息辅助CNS获得高精度载体姿态,此时CNS得到的载体姿态只与其自身精度和码头位置精度有关,而无需惯导水平姿态作为地平信息,以避免引入惯导水平姿态误差。
在获得CNS高精度姿态信息之后,可直接对惯导进行粗姿态赋值,无需惯导再进行凝固惯性系下解析粗对准,虽然可省去惯导粗对准时间,但由于CNS姿态信息赋值存在延时误差,惯导还需进一步做精对准对元件误差进行测漂和补偿。
海上对准中由于舰船在海上航行,载体位置实时变化的,为了完成海上对准一般情况需要借助卫导信息,但是单纯依靠卫导信息对准时间长且精度不易保证。针对星光/惯性组合海上动态对准情况,考虑基于惯导误差全面校准模式下的星光/惯性组合对准研究。
3. 动基座下量测信息转换
惯性/星光组合导航系统海上对准方法中借鉴了文献 [3] 中的设计模式,同时考虑卫导精确位置信息辅助CNS更快更准确的实现惯性坐标系和载体坐标系的转换求解。
船载CNS定位和定向都需要SINS提供水平基准信息,这样不可避免的会引入SINS的水平姿态误差。当有外部提供位置信息时,可借助该位置信息将CNS输出的信息直接转换成地理系下的姿态信息,该姿态信息精度主要受提供位置信息的精度影响。当有卫导提供位置信息时,卫导输出的位置信息除了可以与惯导进行位置匹配之外,还可以用来辅助CNS进行信息转换 [3]。借助卫导的位置信息,将CNS惯性系下信息转换到地理系下,即:
(1)
其中,矩阵
、
分别为惯性坐标系与地球坐标系的关系、地球坐标系与导航坐标系间关系。其转换原理如下图1所示:
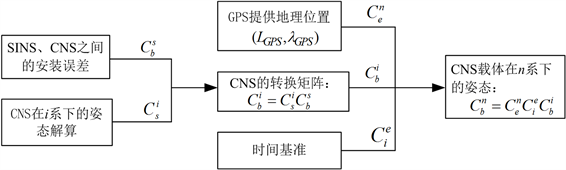
Figure 1. CNS information transformation based on GPS assistance
图1. GPS辅助CNS信息转换
当海上对准时,保持舰船匀速直行,卫导提供星光/惯性组合系统初始对准时必须的初始位置信息,同时惯导在卫导辅助下完成粗对准。在精对准过程中,引入卫导位置信息作为观测量之外,还有在卫导辅助下的高精度星敏姿态信息,作为观测量来加速对方位角收敛速度,提高系统姿态误差(特别是航向误差)的估计精度,从而快速准确的完成组合系统精对准。
4. 组合系统滤波模型设计
卫导/星光/惯导组合导航系统采用姿态 + 位置的组合模式,其基本原理是:将分机系统输出参数进行组合,应用卡尔曼滤波技术,将惯性导航系统的误差方程作为组合系统的状态方程,根据星光导航系统得到载体导航信息,将惯性导航系统与星光导航的导航输出参数误差作为系统量测,通过滤波估计并补偿惯性导航系统误差。
姿态 + 位置组合模式是在姿态组合的基础上加上位置组合,可有效补偿惯性导航系统中由于陀螺漂移而引起的导航误差累积,从而实现多方面补偿惯性器件漂移的目的;另一方面,可以直接对惯导的导航输出参数进行修正,从而提高惯导系统的精度。
姿态+位置组合的主要过程可归纳如下:采用惯导系统的误差方程作为组合系统的状态方程,以惯导解算的导航信息与星光定向仪提供的航向和位置信息构建相应的量测方程,利用最优滤波方法实时估计和补偿惯性器件误差。星敏感器数据的输出频率比惯导数据更新的频率低,因此通常在若干惯性导航解算周期后,再将惯导解算结果与星敏感器数据进行数据融合,同时对惯性导航系统进行修正。其组合模式原理图如图2所示。
1) 建立惯导状态方程
航行状态下,保持舰船匀速直行,采用Kalman滤波方法的SINS/GPS/CNS组合精对准模型的建立:
系统状态变量为:
系统的状态方程仍然采用SINS的误差方程作为系统状态方程,系统状态变量参考文献 [4]。
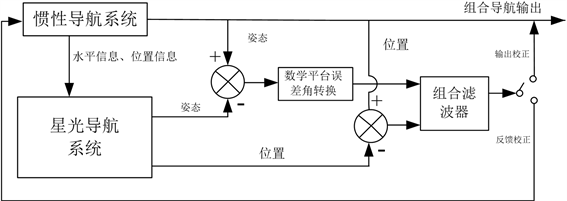
Figure 2. Principle of INS/CNS attitude + position combination mode
图2. 惯性/星光姿态 + 位置的组合模式原理
2) 建立天文/惯导组合导航系统量测方程
星光导航系统观测的星光为载体系下的星光信息,输出的姿态信息是载体系相对于惯性系下的姿态,还无法直接用于对惯性导航系统当地地理坐标系下的导航信息的误差进行修正。星光/惯导组合导航系统的系统状态为数学平台误差角,因此需要将姿态误差角转换成数学平台误差角才能作为卡尔曼滤波器的观测量 [5] [6]。利用姿态误差角转换得到数学平台误差角:
(2)
写成矩阵形式:
(3)
惯导数学平台误差角到姿态误差角的转换,其中转换系数矩阵
为:
(4)
(5)
星光/惯导组合导航系统中捷联惯导系统能够输出姿态(横滚角
、纵摇角
、航向角
)、位置(经度
、纬度
、高度
)信息,星光定向仪可输出姿态航向角
、位置(经度
、纬度
),由于星光定向仪缺少高度信息,故引入高度计测量载体高度信息h来补充。
3)建立卫导/惯导量测
以卫导与惯导位置信息之差作为卡尔曼滤波量测信息:
(6)
因此,天文/惯导/卫导系统的量测信息:
(7)
其中,
分别为水平姿态和航向误差,
分别为纬度、经度误差。
5. 仿真比较
仿真条件分系泊和航行两种状态比较,仿真结果分别如图3、图4所示。
系泊状态:卫导位置精度优于5米;输出频率1 Hz;星敏姿态测量精度5'',输出频率1 Hz,测量噪声3'';陀螺稳定性0.02˚/h,加表零偏1 × 10-5 g,纬度初值39.183˚,经度初值117.142˚,水平摇摆周期20 s,幅值20',航向摆动周期25 s,幅值10'。
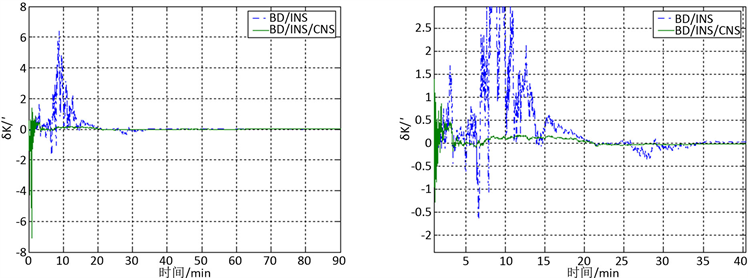
Figure 3. Simulation results under mooring conditions
图3. 系泊条件下仿真结果
航行状态:惯性元件、卫导、星敏、位置假设条件不变,载体以匀速等纬度航行至14 min时,载体以8˚/s大机动180˚转弯后保持均速,水平摇摆周期20 s,幅值3˚,航向摆动周期30 s,幅值0.5˚。
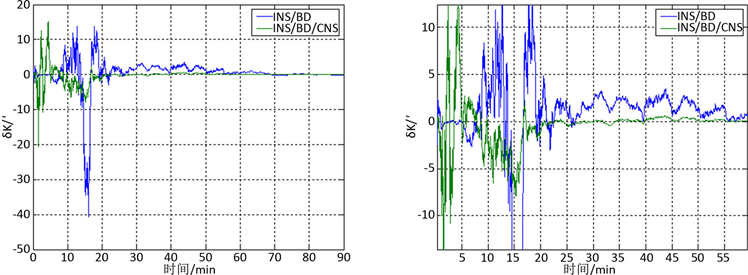
Figure 4. Simulation results under navigation conditions
图4. 航行条件下仿真结果
6. 结论
分析星光/惯性组合系统在航行过程中对准的特点,利用Kalman滤波设计了组合系统动基座对准技术,根据星光借助GPS位置信息转换得到姿态信息与惯导组合方案,并以姿态信息作为组合系统量测信息,在舰船大幅机动时能够保证组合系统滤波器收敛,通过仿真分析其动基座对准航向对准精度优于15''。