1. 引言
由于地质条件的复杂性和区域地理环境的巨大差异性,我国的地质灾害问题历来较为严重。山体崩塌作为发生率较高的地质灾害,其发生时间极快,且具有发生时间和地点的不确定性,对于人民的生命以及财产安全造成了极大的威胁 [1]。中国“十一五”国家科技支撑计划项目《重大地质灾害监测预警与应急救灾关键技术研究》也突出了以遥感技术等进行地质灾害的识别问题。因此,实现快速准确的崩塌区域识别,对于推进国家经济发展和防灾减灾有重要意义。
机载激光雷达(light detection and ranging, LiDAR)作为一种新兴的遥感技术,因其拥有较高的穿透性可透过云层和植被获取地表信息,因此常被用于进行地质勘测。作为近些新兴的遥感测量技术,与传统的光学遥感相比,机载激光雷达的数据采集方式能够很大程度减少地物影响,获得高精度的地面数据 [2],精确地表达地形地貌特征,因此也被用来制作高精度的数字地形图。近些年,美国地质调查局及欧空局等机构开展了通过LiDAR进行滑坡地质灾害的识别研究 [3],通过LiDAR数据生成的DEM数据结合灾害的地面数字特征,实现灾害区域的识别。并在之后陆续有研究LiDAR数据下的不同DEM数据分辨率对于识别效果的影响 [4],以及通过不同地形因子(坡度、坡向、曲率和粗糙度等)实现滑坡崩塌区域的识别 [5],并使用LiDAR数据的数字地形数据,进行滑坡崩塌区域的地质评估研究 [6]。近些年对于LiDAR技术的广泛应用已经证明了该技术优势和潜力。
针对奉节县李子娅山区复杂地质条件下危岩崩塌调查识别困难,本文提出利用无人机机载激光雷达快速获取高精度地貌信息,建立高精度DEM并提取地形因子,分析崩塌区域地形特征,实现对崩塌范围快速精准识别。
2. 研究区概括
2.1. 研究区总体概况
奉节县地处四川盆地和盆边山地过渡地带,地貌基本以山地和丘陵为主,境内地势起伏较大,总体东南高而西北低,层状地层发育,地貌类型复杂多样,山地面积广大。地质构造较复杂,在地层岩性、地质构造、降雨和人类工程活动的影响下,地质灾害发生频繁,灾害面广、类型多、规模大、危害之深,堪称库区之首。全县共有各类地质灾害共计1600处,其中滑坡1424处,占88.9%,危岩崩塌64处,占4.0%,不稳定斜坡90处,占5.7%,泥石流12处,占0.8%,库岸、塌岸3处,占0.2%,地面塌陷7处,占0.4%,类型以滑坡为主,其次为崩塌(危岩)、不稳定斜坡、泥石流及地面塌陷(图1)。
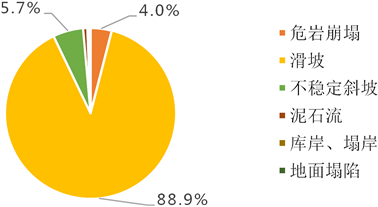
Figure 1. Fengjie county geological hazards in proportion
图1. 奉节县地质灾害占比
2.2. 李子垭危岩特征
李子垭危岩位于奉节县竹园镇百步村6组,主要以侵蚀、剥蚀的中低山斜坡地形为主,地形总体北西高南东低,紧邻斜坡顶部有陡崖分布,斜坡坡面主要为乔、灌木草丛,植被相对较发育(图2)。场区高程在618~1082 m之间,相对高差464 m,最低点位于南侧斜坡底部,最高点位于调查区北部斜坡顶部。从纵向上看斜坡坡角陡、缓不一,坡体地形呈阶形,从横向上看斜坡表面凹凸起伏状。在调查区多数地段地形较平缓,地形坡角一般为2˚~38˚。
主要地质环境问题为陡崖掉块、危岩单体、破碎带。陡崖斜坡总体北西高南东低,坡向153˚,为切向坡,坡顶高程1082 m,坡脚高程744 m,居民分部在斜坡底部平缓处,高程650~744 m。陡崖带位于斜坡顶部,呈直线形,高程860~1060 m,陡崖总体高约200 m,坡度均大于55˚。在2010年10月在暴雨时发生了一次崩塌掉块,崩塌掉块的体积约150 m3;在2014年8月31日~9月2日暴雨时发生了多次垮塌,在陡崖带局部及下方斜坡形成3处崩塌堆积体。
3. LiDAR技术介绍
3.1. LiDAR扫描系统构成
机载激光雷达测量系统的主要组成部分包括激光测距设备、惯性导航系统、GPS定位系统。机载激光雷达系统是以飞机座位观测平台,已经扫描测距系统为传感器,能实现获取地球表面的三维空间信息,还能提供一定的红外光谱信息。
3.2. LiDAR原理
激光本身具有精确的测距能力,而LiDAR系统的精确度除了激光本身因素,还取决于激光、GPS及惯性测量单元三者同步等内在因素,通过搭载于移动平台上获得高精度的数据。激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像 [7]。
4. 数据获取与处理
4.1. 设备选择
本次试验选择LiAir 1000无人机激光雷达扫描系统进行数据采集。该系统激光器采用奥地利RIEGL公司的RIEGL VUX-1UAV (见表1);惯导系统采用AN-IGM-S1 (见表2),它集成了挪威Sensonor的高精度惯性测量单元STIM300 和NovAtel OEM615板卡。

Table 2. Main parameters of inertial navigation system
表2. 惯导系统主要参数
4.2. 设备选择起降场地选择与航线规划
通过现场调查和结合危岩崩塌体及周边地形地貌,起降场地选在李子垭危岩下部平缓地带的公路上,四周空旷,无遮挡,无干扰源。适合无人机起飞和盘旋。
结合测区现状规划航线,结合设备性能,保持设备与陡坡地表距离控制在100~150 m之间,针对测区布设不同位置和高度的航线4条,分4个架次进行作业。相对起飞点地表航高分别120 m,260 m,360 m,470 m。
4.3. 试验研究
无人机起飞前准备,地面站准备,导入地面航线规划数据,飞行速度5 m/s,风速小于5级,第一架次飞行相对高度120 m,航线长度2.425 km;第二架次飞行相对高度260 m,航线长度2.443 km;第三架次飞行相对高度360 m,航线长度2.460 km;第四架次飞行相对高度470 m,航线长度2.564 km。
由于LiDAR系统直接获取的是激光光束发射角度以及该光束往返时间,不能直接形成三维坐标数据,因此需要通过三维点云结算将每个激光脚点的发射角及测距值结算为地理空间三维点云坐标数据。
1) 数据下载
连接激光雷达设备,下载数据(图3)。
2) 点云数据解算
首先激光扫描坐标系坐标计算,先是测量的时间间隔转换为距离,然后将每个探元与激光发射光束相对应,通过对应的发射角和距离值可以得到点在激光扫描坐标系下的坐标。
然后将激光扫描坐标系转换到IMU坐标系,每一个设备的激光扫描中心到IMU坐标洗的中心都有一定的偏移量,设备集成后IMU坐标系与激光扫描坐标系之间形成了固定的安置角度。IMU记录了设备的导航的空间位置和设备的俯仰角(pitch)、航向角(yaw)、横滚角(roll)数据。
最后将IMU坐标转换为地理空间三维坐标,通过设备的导航的空间位置和IMU的坐标系将点云转换为地理空间三维坐标系,利用NovAtel公司的Inertial Explorer软件和LiDAR360软件进行数据解算和输出(图4~5)。
3) 航带拼接
实验中使用了四条航线进行四次飞行以获取地面数据,由于相邻航带的同名特征间存在三维空间偏移,影响点云数据的精度和后续数据处理和使用,因此需要进行航带拼接消除航带间的误差。通过对安置误差进行检校实现不同航带间的数据拼接,并删除无人机转角处和盘旋处等不稳定飞行期间的数据,留下直线飞行处所采集的较为稳定准确的数据,保证后续实验数据精度(图6)。
4) 数据评价
点云数据质量是生成高精度DEM数据的前提,其中点云密度是保证数据质量的重要属性(图7),也是评价点云数据的主要指标,根据实验可知点云密度越大后续生产的DEM数据精度越高 [8],山地区域对于点云数据的密度相较于平地区域需求更大,当密度低于1.44点/m2时便几乎无法满足生产要求。本次实验通过四次飞行获取数据,使研究区域处于航线重合内,点云密度高于平均密度(表3),符合高精度DEM生产需求。
 (a) 拼接后数据
(a) 拼接后数据  (b) 调整后数据
(b) 调整后数据
Figure 6. Route data processing
图6. 航线数据处理
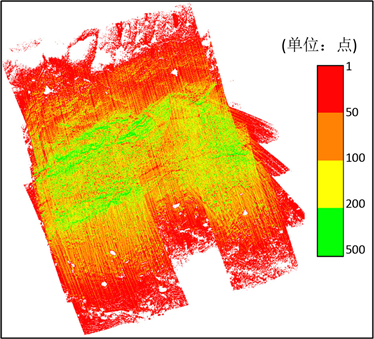 (a) 密度热力图
(a) 密度热力图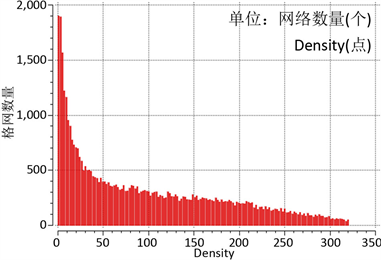 (b) 密度直方图
(b) 密度直方图
Figure 7. The point cloud density
图7. 点云密度
5) 数据处理
点云数据预处理首先为数据去噪,目的为去除远离地面的离散点,去除无用数据干扰,一般通过搜索邻域点密度进行筛选 [9]。随后对数据进行分类处理,提取出实验需要的精确地面点数据,目前提取地面点最为常用且有效的方法为渐进加密三角网滤波法 [10],通过对点云数据进行格网化并取格网内的最低点作为起始种子点,利用起始种子点构建初始三角网,使用初始的三角网进行加密迭代,迭代后小于对应阈值,则将此点判定为地面点,并加入三角网中。重复此过程,直至所有地面点分类完毕。实验选择通过两次提取地面点,通过对比两次地面点生成的DEM的不同,选择效果较好,与实际地面情况更相符的数据。对比后仅能在边缘发现两幅DEM数据图的不同,内部并无区别(图8)。
崩塌区域识别主要通过不同地形因子(坡度、坡向、曲率和粗糙度等)进行实现,本实验选择利用粗糙度和坡度因子进行研究区域的崩塌区域识别。DEM数据生成山体粗糙度图和坡度图(图9),通过分析崩塌区域的特性实现区域识别。
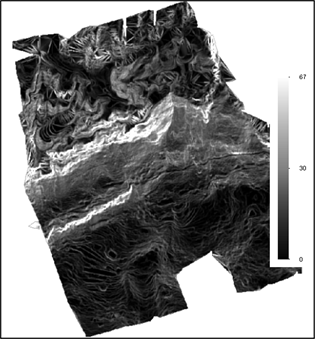 (a) 粗糙度图
(a) 粗糙度图  (b) 坡度图
(b) 坡度图
Figure 9. Data processing diagram
图9. 数据处理图
5. 灾害体识别与应用分析
通过分析崩塌区域的表面特征,并将其用来作为提取崩塌区的依据。崩塌区域的地形形态需要从多种角度进行分类,正常崩塌区域分为两部分,上部分为崩塌区域,向下凹陷,下部分凸起,为崩塌堆积区域,并以此为识别崩塌滑坡的主要特征进行识别。通过获得的DEM数据,获得研究区域坡度、粗糙度并了解在崩塌区域的变化规律。对于坡度在崩塌区域的变化,可区分为崩塌上下部分均与周围地貌坡度跳跃变化明显,且跳跃变化幅度大体一致,可通过坡度图圈定出崩塌边界。且崩塌区域与崩塌堆积区域的坡度值较为集中,且在形态上表现为面状分布。而崩塌区域的粗糙度变化能总结为,崩塌区与周围地貌粗糙度跳跃变化明显,地表粗糙度跳跃幅度也基本相同,据此从地表粗糙度图上圈定出崩塌区的边界,结合粗糙度图形与坡度图形同时识别区域作为最后识别结果。实验后我们排除识别区域小且零碎等不符合的区域去除,最后成功识别出8处崩塌,并与实际崩塌区域匹配(图10)。
6. 总结
本次实验以重庆市奉节县李子崖危岩为例,实现从机载激光雷达数据中提取地面点生产DEM数据,并通过DEM获取地面坡度图和粗糙度图,结合崩塌区域地形特征,实现崩塌区域识别。从结果可知,LiDAR技术所具有的高穿透性,可从密集植被覆盖区域获取地面信息。
该技术已满足生产需求,可在一定条件下弥补传统遥感技术无法透过植被或遮挡获取地貌的不足。研究区域内崩塌区域成功识别也确定了地形因子对于崩塌区识别的有效性和准确性,为防灾减灾提供了技术支持。
基金项目
Special Project of Performance Incentive guidance for Scientific Research Institutions of Chongqing Science and Technology Bureau: Investigation, Feature identification and Monitoring Technology of High-steep dangerous rock Mass based on airborne lidar and its Application Research (No. CSTC2018JXJLX0001).