1. 引言
生物特征作为人的一种内在属性,具有较强的稳定性和个体差异性,是理想的自动身份验证的依据。由于其具有随身携带、终生不变性、唯一性、不易丢失和冒用、防伪性能好等优点而被广泛关注。目前流行的生物特征识别方式可分为人脸识别、指纹识别、掌纹识别、虹膜识别等 [1] [2] [3] [4],每种都具有明显的优缺点,其中人脸识别以其具有直接、友好、方便、交互性好等优点,一直被研究学者所关注,在门禁领域也有广泛应用。
人脸识别可谓是人脸识别门禁系统的灵魂。所选用算法性能的优劣与系统性能的好坏有很大关系。算法太过复杂,虽识别率得到提高,但影响到系统的运行速度;而选用简单的算法,虽然系统运行速度有所提升,但识别率不佳,无法满足实际需求。因此要兼顾系统的运行速度和识别率,选用合适的人脸识别算法。
人脸识别分为两个主要过程,即人脸检测过程和人脸识别过程,如图1所示。两个过程根据选择的算法不同,可以具体划分为人脸检测、特征提取和特征匹配等一系列算法 [5]。
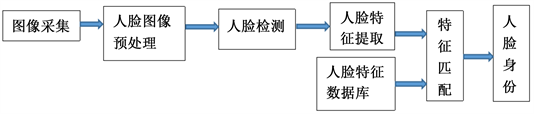
Figure 1. Block diagram: face detection and recognition
图1. 人脸检测过程和人脸识别过程框图
1.1. 人脸检测算法
人脸检测包括人脸存在检测、人脸定位和人脸跟踪。人脸存在检测就是在给定图像中确定其中是否存在人脸。人脸定位就是在确定有人脸的图像中给出人脸的位置、大小等状态信息,并进行必要的几何配准工作。而人脸跟踪指在一组连续静态图像所构成的动态视频中实时地检测 [5]。人脸检测主要受到光照、噪声、姿态以及遮挡等因素的影响,人脸检测的结果直接关系到后面两个过程的准确性。在人脸检测方面,主要的方法有基于Adaboost的方法,基于支持向量机的方法以及基于神经网络的方法等。
1.2. 特征提取
人脸的特征提取是人脸识别系统的核心部分 [6],提取能够反映人脸的本质属性且对各种外在变化不敏感的人脸描述特征就成为了人脸识别的关键步骤之一。人脸是一个三维非刚性物体,对于一般的二维人脸图像识别而言,其二维投影图像会受到光照、表情、姿态、遮挡、胡须、化妆等种种干扰因素的影响,同一人脸的不同图像样本之间存在很大的变化,即类内变化,几乎总是要大于由不同个体人脸造成的类间变化。其次,对于计算机而言,人脸图像表现为象素的灰度值矩阵,维数很大,很难直接计算,这都需要一种用较少信息来描述人脸的方法 [7]。特征提取正是满足上述要求的人脸表征技术,主要达到两个目的:一是从配准好的人脸图像中提取能区分不同人的特征;二是降低人脸图像中的信息冗余,减少维数,提高后续识别的运算速度。主要的方法和模型有:面部几何特征,主成分特征,独立元特征,包括小波Gabor变换、离散小波变换DWT、快速傅里叶变换FFT等 [6] [7] [8] [9] [10]。
1.3. 特征匹配
特征匹配是采样图像的特征点在样本图像中寻找自身的最优解,而最优解并不一定是相似度最高的解,对于二维人脸图像来说,特征匹配过程相当于求采样图像的特征点在样本图像中的最佳覆盖,即在以相似度为结果的特征对比的方式下,特征点匹配过程可以转换为一个特征点点集在一个空间内的求取最佳覆盖问题 [8]。最佳覆盖问题属于优化问题,已有的优化问题解决方法很多,常见的有随机搜索法、退火法和进化算法等 [3]。
2. Gabor小波变换的人脸识别方法
基于连续的Gabor小波变换的人脸识别方法,并简称为Gabor小波方法(Gabor Wavelet Method,GWM)。GWM对人脸图像上的部分结点(基准点)或全部像素进行多尺度、多方向的Gabor小波变换,提取人脸的纹理特征,然后再对提取的Gabor特征进行后续的特征选择、降维、特征再提取以及分类识别等处理,如图2所示。

Figure 2. Block diagram: Gabor wavelet transformation process
图2. Gabor小波变换过程框图
多方向、多尺度频率变化的Gabor小波变换,以其与人类视觉系统有诸多相似之处而被普遍认为是适用于人脸图像的特征提取。国内外一些研究学者也证实了二维Gabor小波变换具有优良的空间局部性和方向选择性,能够抓住图像局部区域内多个方向的空间频率尺度和局部性结构特征,具有方向不变性及尺度不变性,对姿态、表情、光照等外界因素的不敏感 [5] [6] [7] [8] [9]。
但是Gabor特征的缺点在于其维数较高,不利于后端分类器的实现 [10]。针对这个问题,本文提出了一种基于Gabor特征“分–合”的人脸表示和识别方法。该方法首先提取人脸图像上的整体Gabor特征,然后按照基准点(眼角,鼻尖,嘴巴,下巴颌等)的属性并以该点为中心计算得到的多尺度、多方向Gabor变换特征形成的特征串,属性图的每条边对应两个顶点之间的连接,其属性为两点之间的距离。对Gabor特征进行分组,每组特征单独设计一个分类器,这样就得到多个子分类器。最后,多个子分类器的输出按照某种规则进行合成,得到最终的识别结果。既保证利用较多的判别信息,又使得每个子分类器需要处理的特征维数相对较低。
2.1. 局部Gabor特征提取
二维Gabor滤波器的核函数定义为一个用高斯包络函数约束的平面波(图3其计算过程的一个示意图):

Figure 3. Sketch diagram: 2 D Gabor filter kernel function calculation process
图3. 二维Gabor滤波器的核函数计算过程的一个示意图
(1)
其中,
;
表示核函数的频率,
表示核函数的方向,方括号中的第一项决定了Gabor核的震荡部分,第二项则为补偿直流分量,用以消除核函数响应对图像亮度绝对值变化的依赖性。公式(1)实际上定义了一组在平移、旋转和尺度变化意义下自相似的函数。也就是说,该公式定义的所有滤波器,均可以通过对某一Gabor滤波器进行适当的平移、旋转和尺度变化来得到。因此,通过设置不同的尺度和方向,可以得到一组自相似的二维Gabor核函数。另外,从公式(1)中可以看出,Gabor核函数的实部和虚部具有相似的形状,只是相位有所不同。
2.2. Gabor特征的分组和集成
将高维的Gabor特征划分成多个维数较低特征子集,对每个特征子集单独设计分类器并按照某种方式对其分类结果进行集成以得到最终的识别结果。显然,在特征分组的过程中,特征的空间位置关系可以被利用,特征子集也可以被分配不同的权重,而且特征子集所包含的变化较之所有的特征也要小很多。因此,该方法可以有效的避免整体表示方法中维数过高的问题。
按Gabor特征有5种不同的分组方法:按照不同的核函数;按照核函数的不同尺度;按照核函数的不同方向;随机采样和图像分块。其中图像分块基本思想是将空间位置临近的Gabor特征划分为同一组。一种比较直观的做法是将人脸图像分成若干图像子块 [11],落在每个图像子块内的Gabor特征组成一个特征向量:
(2)
其中,
和
表示第i个图像子块左上角的坐标,
和
表示第i个图像子块右下角的坐标。
显然,在基于图像分块的方法中,如果图像子块之间的重叠较少,那么所产生的特征向量之间差别就会比较大。但是,根据特征分组原则,每个子分类器的分类能力不能太弱,也就是说每个图像子块覆盖的面积不能太小。而图像子块覆盖面积又不能过大,否则整体表示中的问题依然存在。因此,需要在子块数量、子块大小以及重叠程度之间找到一个平衡点。由于相邻的Gabor特征之间本身存在较大冗余,各个图像子块即使互不重叠,其对应的特征向量所包含的判别信息也会有一定的冗余 [8] [9] [10] [11]。因此,本文只考虑图像子块互不重叠或者重叠较少的情况。显然,最简单的做法是将图像均匀划分为相同大小且互不重叠的子块。此时,唯一可以调整的参数就是图像子块的大小。经过Gabor特征提取和分组之后,一幅人脸图像可以表示为N个Gabor特征向量的集合。
基于Gabor特征分组及其集成的人脸识别方法,将高维的Gabor特征按照某种规则进行分组,每组特征单独设计分类器并将多个分类器集成起来以得到最终的识别结果。通过理论分析和实验验证,将某个图像子块内的特征划分为同一组是一种比较好的分组方法。
2.3. 弹性束图匹配算法
弹性束图匹配算法,该算法利用人脸的基准特征点构造拓扑图,使一组在频域上以对数方式采样的2D Gabor小波可以模拟所有的简单细胞,它能有效增强边缘以及峰、谷、脊轮廓等底层图像特征,这相当于增强了被认为是面部关键特征部件的眼睛、鼻子、嘴巴等信息,同时也增强了诸如伤疤、黑痣等局部特征,从而使得在保留总体人脸信息的同时局部特征也得到了增强 [4] [6]。
但确定基准特征是关键,采用整体法确定基准点,一般把眼睛定位基准点。整体法是粗略对齐人脸图像逐像素计算每个像素点的多方向、多尺度Gabor变换特征,形成Gabor特征的人脸表示,然后进一步进行后续的特征降维、选择或特征再提取等操作。这样,算法只需要精确定位眼睛位置而不需要定位其他关键特征点。
基于局部特征的人脸识别方法保留了局部特征的拓扑结构作为整体特征。将模拟进化算法与基于局部特征的人脸识别方法相结合,整体的拓扑结构约束作为进化算法中的整体优化,局部特征的相似度对比作为进化算法中的局部优化,即可完成人脸面部特征点的正确匹配,完成高精度的人脸识别。
3. Gabor小波变换的人脸识别方法仿真分析
实验对基于Gabor特征“分–合”的人脸表示和识别方法的特点和性能进行测试。首先提取人脸图像上的整体Gabor特征,然后按照按局部极值的相对高度排序,形成三种具体的算法:按图像分块局部极值排序的单通道识别算法;按图像分块局部极值排序的多通道特征融合算法;按图像分块局部极值排序的多通道分类器融合识别算法。本文采用第三种——按图像分块局部极值排序的多通道分类器融合识别算法。按局部灰度极大值排序,得到信息量较大的区域分块,得到基准点,如图4所示,把每幅图划分为9块,每一块作灰度直方图,如图5所示,再排序,选取高灰度区重点分析,并确定其中的基准点。

Figure 4. High-value region selection of image Block Local Extremum
图4. 图像分块局部极值法的高值区选取
经过灰度极值排序,最终,从分割的9块区域中选取灰度极值较大的5块,其它区域融合时进行适当的填补,得到的图像经过检测,并与其它算法比较,见表1。从中可以看出,本文算法和肤色检测及Adaboost算法检测相比较,检测率高,误检数目少;检测速度比Adaboost算法快。

Table 1. Different algorithms test results
表1. 不同算法检测结果
4. 结论
Gabor小波变换对人脸图像上的部分结点(基准点)进行多尺度、多方向的Gabor小波变换,提取人脸的纹理特征,然后再对提取的Gabor特征进行后续的特征选择、降维、特征再提取以及分类识别等处理。结合弹性束图匹配算法,利用人脸的基准特征点构造拓扑图,使一组在频域上以对数方式采样的2D Gabor小波可以模拟所有的简单细胞,它能有效增强边缘以及峰、谷、脊轮廓等底层图像特征,在检测过程中只要抓住基准点,就可保留总体人脸信息,同时局部特征也得到了增强,这样可减少运算量,提高识别率和识别速度。
基金项目
本文受到2018年国家级大学生创新创业训练计划项目(201810722007)资助。