1. 引言
当前老龄化趋势不断加剧,老年人口激增,但市场养老产品研发却停滞不前 [1]。目前市场已有的该类产品设计以老年辅助用品及代步装置为主,缺乏从身体健康层面出发针对老年人研发的家居健身装置产品,因此针对老年人群体家居健身锻炼产品的研发尤为重要 [2]。
文献查阅发现,针对智能家居养老椅结构设计,国内外研究学者开展了一系列研究工作。Fatima University设计了一种自动电子椅装置,该装置主要协同Arduino微控制器和MIT软件帮助残疾人士独立移动 [3]。Universiti Putra Malaysia采用模糊逻辑的人工智能设计了一种电子按摩椅 [4],可以根据控制系统改善用户的健康情况。西安理工大学设计了一种投币式按摩椅装置 [5],该装置具备音乐播放、按摩速度显示、按摩模式选择等功能。目前国内外智能家居椅的装置结构简单,功能较为单一,控制系统操控难度较大 [6] [7] [8]。本文针对现有智能家居椅装置的诸多问题,提出一种新型的智能家居椅装置。为确认其机械的可行性,先用SoildWorks软件进行建模,进行动力学计算,确认其各项动力学数据,再应用有限元模块,分析其关键部位,确认机械的强度和刚度是否符合要求。在优化各项尺寸数据,完善性能后,制造出实物样机,并进行性能检验,验证其各项性能的达标程度。为新一代智能家居椅装置的开发提供一种新思路。
2. 设计原理及结构
智能家居养老椅将整个系统分离成多个独立的模块 [9],通过SoildWorks进行三维建模,如图1所示。每个模块可独立且高效地运转,集成后各个子模块之间互不干扰,共同组成一个完整的系统。养老健身椅共有以下四大模块:
1) 阅读一体化模块:模块主要通过电机驱动气泵沿齿条上下运动,舵机带动气泵下移使吸盘接触书面,电动气泵启动使吸盘内形成负压,吸盘再上移使书页被吸起,实现翻面功能;此时,翻书杆由另一个齿轮传动机构带动,向对侧移动将书页推至另一侧,实现翻书功能。
2) 捶背敲肩联动模块:模块具有调整敲击高度,水平平移的功能。高度调节依靠整套链条链轮构成的减速机构,将目标链轮与击打装置连接,电机的转动减速带动击打装置改变高度,使击打装置在高度调整更平稳、精确;水平平移主要借助电机带动丝杠转动,实现装置的左右平移,使得装置改变水平击打位置。
3) 换鞋一体化模块:模块主要由送鞋装置和除臭烘干装置组成。通过固定在水平移动平台上的鞋拔子辅助脱鞋,利用螺旋传动机构带动水平平台移动,实现鞋子的送入和送出。除臭烘干由风扇与平台旋转装置构成当鞋子送入指定位置(即椅子下方)时,风扇旋转吹风,通过齿轮传动机构,使得电机带动整个平台定点旋转,使得鞋子能更好地除臭烘干。
4) 多功能椅子复合模块:多功能椅子复合模块包含辅助起身、座椅前后调节功能。辅助起身装置由电机带动齿轮传动,使推杆杆传动,与铰接处形成三连杆结构,控制椅垫的升降,完成辅助起身过程;座椅前后调节装置中齿轮齿条机构起到辅助平移效果,螺旋传动机构则由电机带动,以保证推动椅子的平稳性,座椅前后调可根据老人自身选择性调节。

Figure 1. Three-dimensional model of intelligent home for the aged chair
图1. 智能家居养老椅三维模型
3. 动力学与有限元分析
根据已知的智能家居养老椅的输出数据,基于动力学模型,对各关键部位进行运动学与力学分析 [10],以获取需要的数据。
3.1. 捶背机构和椅子移动机构的丝杠运动分析与有限元分析
捶背机构和椅子移动机构的主要传动方式为丝杆 [11] 传动(图2),丝杆副受到轴向载荷作用,在丝杆公称直径
处产生螺纹力矩
。当机械手臂台中丝杆螺母无预紧情况下 [12],有:

Table 1. The related screw parameters on the back punching device
表1. 捶背装置上的相关丝杆参数
代入表1参数:
(1)
式中:
为丝杆受到总力矩,N∙m;
为在丝杆公称直径 处产生螺纹力矩,N∙m;
为丝杆公称直径,mm;
为丝杆副受到的轴向载荷,N;
为丝杆导程,mm;
为螺纹传动效率。
处产生螺纹力矩,N∙m;
为丝杆公称直径,mm;
为丝杆副受到的轴向载荷,N;
为丝杆导程,mm;
为螺纹传动效率。
代入式(1)的计算结果可得:
(2)
故可以通过电机旋转带动捶背结构的横向移动。
Table 2. The related screw parameters on the chair moving mechanism
表2. 椅子移动机构上的相关丝杆参数
代入表2参数:
(3)
(4)
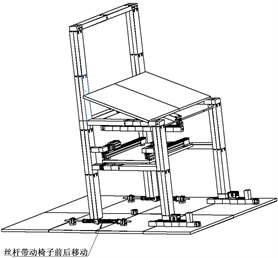
Figure 2. The way in which the lead screw drives the mechanism
图2. 丝杠带动机构运动的方式
在Adams导入三维模型(图3),并添加一个固定副,一个转动副和最大载荷。以及阻尼、摩擦等条件,根据实际情况选定丝杠和固定板的材料属性 [13],如图3所示。运行模型得到输出转矩如图4所示。
选用扭矩为1.8 N∙m电机驱动丝杆,所选电机扭矩足够大,符合要求,故可以通过电机旋转带动捶背横向移动和椅子机构前后移动。
Figure 3. Adams simulation of lead screw
图3. 丝杠Adams仿真
从仿真曲线中可以得知,实际输出转矩最大在0.325 N∙m左右波动,与理论计算的结果0.34 N∙m相差不是很大,仿真验证有效。
3.2. 链传动的输出转速分析与有限元分析
链传动主要用于脚踏传递动力到风扇上,电机带动翻书机构的转动,电机带动丝杆运动,丝杆联动,带动二次传动,带动捶背机构前倾后仰调整角度等。
链传动在机构中的布置如图5所示:
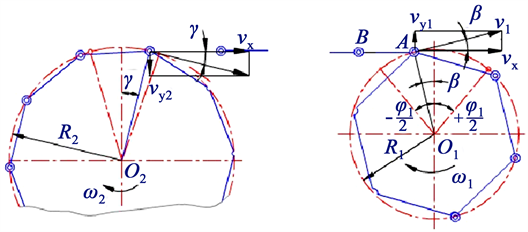
Figure 6. Schematic diagram of conveying chain
图6. 输送链原理图
如图6所示为输送链原理图,链的速度完全取决于图中B点的速度,而铰点B的速度即为主动轮的圆周速度:
(2)
链的水平前进速度:
(3)
链的垂直速度:
式中:
为A点的圆周速度;β为链节进入啮合后,铰链中心和链轮中心连线与链轮中心到链条铅垂线的夹角;
为主动轮分度圆半径。当
时,水平链速最小,有:
(4)
当
时,水平链速最大,有:
(5)
由上式可见,每转过一个链节,链速都要周期性变化一次,即瞬时链速是变化的。这就造成链传动速度的不均匀。链条线速度变化可用链速不均匀系数k (或称不平稳系数)来表示:
(6)
式中:
为最大链速;
为最小链速;
为均链速。
基于实验室仿真数据,代入公式,得到以下结果:
(7)
(8)
(9)
紧边有效拉力:
(10)
离心拉力:
(11)
链传动时悬垂拉力:
(12)
其中,a为链传动中心距,
为下垂量y = 0.02a时的垂度系数。
通过计算得:
链的紧边拉力:
(13)
链的松边拉力:
(14)
利用Solidworks自带的有限元软件对最大拉力下的链条应力应变进行分析。
由图7、图8可见最大应力为7.130 × 10−9 MPa,最大应变为1727 mm,即不会发生变形崩断,故符合设计要求。

Figure 7. Analysis of maximum stress of chain
图7. 链条最大应力情况分析
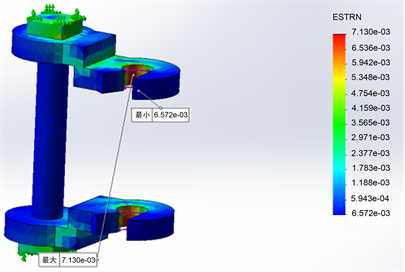
Figure 8. Analysis of maximum strain of chain
图8. 链条最大应变情况分析
3.3. 翻书机构和抽屉机构中齿轮齿条受力分析
齿轮齿条的受力情况如图9所示,其中Ft代表周向力、Fr代表径向力、Fa代表轴向力、Fn代表法向力、β代表螺旋角、an代表法面压力角、at代表断面压力角 [14]。
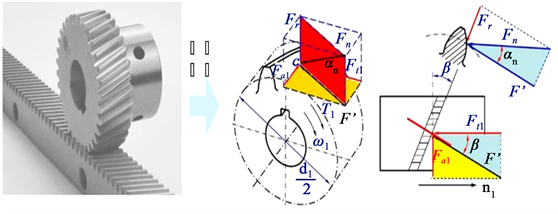
Figure 9. Force acting on rack and Pinion
图9. 齿轮齿条啮合受力
由受力分析可得以下方程组:
(15)
对翻书机构和抽屉机构进行受力分析,由上式计算齿轮齿条受力情况,得知不会产生零件失效,符合设计要求。
4. 运动参数结果分析
通过前面的运动学分析所得出的数据,再结合运动学基本定理,获得本智能家居养老椅的运动参数。其具体关键结构理论运动参数如下表1~3所示。
4.1. 链传动运动参数分析
对受力情况进行模拟,得到下表3所示参数:
Table 3. Theoretical parameters of drape tension
表3. 悬垂拉力理论参数
4.2. 齿轮齿条运动参数分析
对受力情况进行模拟,得到下表4所示参数:
Table 4. Gear rack analysis parameter
表4. 齿轮齿条分析参数
代入表2的参数,计算可得表5所示分析结果:
由以上结果可知,不会发生破坏现象,设计符合要求。
5. 实物试制与实验
5.1. 实物试制
通过仿真可知,智能家居养老椅具有良好的工作可靠性以及较好的适应性,基于三维模型和设计数据,对智能家居养老椅进行实物样机的制造,其实物模型如图10所示。

Figure 10. Physical model of the intelligent home for the aged chair
图10. 智能家居养老椅实物模型图
5.2. 实物试验
试验地是产品开发附近的一所养老院。先对产品进行模拟化工业设计,分设为不同的模块,进行产品样品批量化生产,让老人进行各模块产品性能试验;未来研究为制作铝合金样机,进行完整工能体验。本次试验老人对象多为60~75岁的老人,其中30%以上不适合室外运动。
5.3. 试验结果
通过对87位老人的试验获得数据,得到本智能家居养老椅的实际性能指标,如表6所示。
由表4可见:本文提出的一种智能家居养老椅装置,操作难度小于7.2%,功能要求达到用户要求的97.5%,智能性高于30%,相比于传统的人工养老或者普通养老装置,具有更好的性能,结构设计较为复杂,可以很好地满足更多用户的要求,实现多功能集合于一体的存在。同时,可以发现智能家居养老椅的各性能指标基本都达到技术和市场要求,设计是合理的。
6. 总结
本文从老龄化趋势出发,关注老年人的健康状态,设计了一种基于模块化设计的智能居家养老椅,从设计方案、理论校核计算对本产品进行了研究,并综合运用Adams以及Solidworks软件对所设计的模型进行了有限元分析和动力学仿真,分别对所设计机构的安全性以及对选用电机的合理性进行了校验,结果发现,所设计的智能家居养老椅满足理论要求,各项性能均具有较高的要求;最后将智能椅子分多个模块分别进行实地试验,在产品各项性能指标都基本满足技术和市场要求的情况下,进一步验证了智能家居养老椅的可行性和合理性。为智能家居养老椅的结构设计提出了一种新的思路,可供更多的学者进行研究。
基金项目
浙理工高等教育科学研究课题(Xgz1803)、浙理工实践教学类教改课题(XKJS1801)和浙理工机械工程优势特色学科(2018)项目资助。
NOTES
*通讯作者。