1. 引言
联接翼布局飞机与常规布局相比具有众多优点,如:重量轻,刚度大,诱导阻力小,跨音速面积分布好,最大配平升力系数高,浸润面积小,具有直接升力和直接侧力控制能力,稳定性和操纵性好等。20世纪70年代美国的J. Wolkovitch [1] 首先提出了连翼布局飞机的概念并对联接翼开展的系列分析及实验研究,结果表明联接翼相对传统单翼具有气动、结构等优势。自此后国内外已经对菱形连翼布局飞机进行了大量的研究并进行了风洞试验,R.K. Nangia等 [2]、J. Wolkovitch [3]、J. Corneille [4] 对盒式翼/联接翼完成了系列风洞实验,验证了此类气动布局的升阻特性优势。龙纯毅等 [5] 基于CFD计算对联翼布局机翼模型进行数值仿真,对端板的偏转角度设计了试验方案,分析不同偏转角α下的升阻比和俯仰力矩特性。尹钧等 [6] 采用涡格法研究了联接翼主要布局参数变化对升力系数、阻力系数和最大升阻比的影响。王晓璐等 [7] 采用基于S-A方程湍流模型的雷诺平均法求解N-S方程,研究了联接翼布局前后翼几何参数对气动特性的影响规律。孙俊磊等 [8] 采用基于混合网格技术及k-k转捩模型求解雷诺平均N-S方程的多重参考系(MRF)方法对带桨状态的低雷诺数菱形翼布局无人机(UAV)的气动特性进行了准定常数值模拟,研究了螺旋桨在不同安装位置时其滑流对联接翼布局无人机气动特性的影响。
为保证飞机的飞行性能和飞行品质,飞机通常需要满足一定的静稳定性要求,气动焦点和重心需要保持合适的相对位置。联接翼布局的前后翼作为统一的升力面和控制面,两者产生的升力共同平衡飞机重量,两者的控制面共同对飞机进行配平。由于前翼气动效率相对于后翼要高,因此盒式翼/联翼布局通常将前翼作为主升力面,但后翼同样作为一个重要的升力面,会使全机焦点和压心位置后移,对整个飞机的气动性能产生极大的影响。在前后翼面积分配一定的情况下,影响全机焦点的一组重要参数是前后翼的升力线斜率,影响全机压心的一组重要参数则是前后翼的升力系数。前后翼的升力线斜率受到前后翼展弦比、后掠角、飞行马赫数以及前后翼气流干扰等总体性能和几何参数的影响。当后翼几何外形参数发生改变时,后翼前掠角、前后翼距离等参数的变化将会对飞机的飞行性能产生较大的影响 [9] [10]。
本文提出了一种联接翼布局无人机方案,采用CFD方法对联接翼布局方案模型的外部流场进行数值模拟,研究了在保持前翼参数以及前后翼翼根间距不变的情况下,后翼外形变化对联接翼布局的升阻特性以及俯仰特性的影响。
2. 数值计算
2.1. 模型基本参数
联接翼由前、后两翼构成,前翼在上、后翼在下时,称为正交错布局;反之,则称为负交错布局。Tracy I. Bagwill和Bruce P. Selberg的研究表明,正交错布局的气动效率明显高于负交错 [11]。但从结构、动力布置等方面考虑,采用负交错在大部分情况下要好于正交错,因此,实际研究的大多为负交错布局,本文的研究方案也采用负交错布局。本文中无人机前翼的面积、展弦比、后掠角等几何外形参数固定,前、后翼的翼根的安装位置固定;初始外形下后翼的前掠角为25.2˚,根稍比为1,下反角为5.2˚,在无人机后翼变形后,机翼内侧为平直翼,通过改变平直翼的长度来改变后翼外形参数,其外形如图1所示,主要气动外形参数如表1所示。
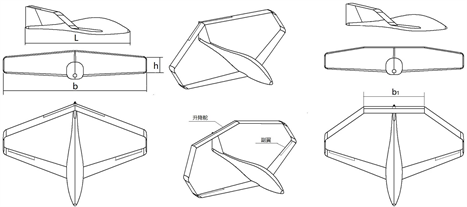
Figure 1. Aerodynamic configuration of Joined-wing UAV
图1. 联接翼无人机气动外形

Table 1. Aerodynamic parameters of Joined-wing UAV
表1. 联接翼无人机外形参数
2.2. 数值计算方法介绍
采用STARCCM+对该型无人机进行全机流场模拟。控制方程为雷诺平均N-S方程。不可压湍流计算的基本方程为平均流连续方程:
(1)
平均流动量方程为
(2)
湍流模型为可实现的K-Epsilon两层模型。K-Epsilon 湍流模型是双方程模型,它可对湍动能K和湍流耗散率
的传输方程进行求解,以确定湍流涡粘度。K-Epsilon 模型的各种形式已投入使用数十年,如今它已成为工业应用中最广泛使用的模型。自K-Epsilon模型问世以来,已进行了无数次改进。最显著的改进已包含在Simcenter STAR-CCM+中。两层方法由Rodi [12] 首次提出,它是低雷诺数方法的替代方法,可以将K-Epsilon模型应用于粘性影响层(包括粘性子层和缓冲层)。在此方法中,计算将分为两层。在壁面旁边的层中,湍流耗散率
和湍流粘度
均被指定为壁面距离的函数。近壁层中指定的
值将与远离壁面的传输方程求解值平滑混合。系统将对整个流体域的湍动能方程进行求解。这种显式指定
和
的方法经验并不亚于阻尼函数方法,其结果可与之媲美,甚至更出色。
K-Epsilon模型运输方程为
(3)
(4)
式中:
为平均速度,
为动力粘度,
、
、
和
为模型系数
和
为结果项,
为阻尼函数,
和
为用户指定的源项。
2.3. 网格建模
本方案无人机机体坐标系定义为:坐标原点O在机头轴心位置,X轴沿水平轴线指向机尾,z轴在中心平面内垂直于Y轴指向上,Z轴按右手坐标系法则确定,为垂直于X-Y平面指向右。此外,该型无人机被设定为低空低速无人机,其飞行速度区间为150~300 km/h,飞行高度在500m左右。网格划分也在STAR-CCM+软件中完成,无人机表面网格如图2所示。计算流域内为多面体网格,对翼面前缘和后缘等关键部位进行局部加密,垂直于表面网格生成6层棱柱网格以适应附面层内法向速度梯度的剧烈变化,飞机表面Y+取30,使用壁面函数法来衔接物面与外流场的各物理量,最终总网格数量约为455万。
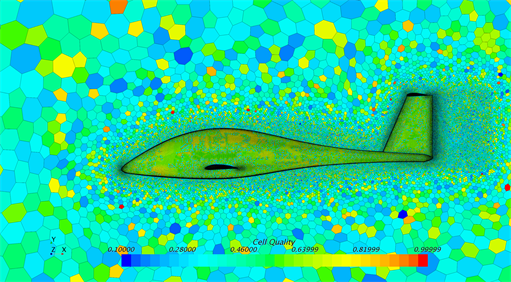
Figure 2. Mesh model of the joined-wing UAV
图2. 无人机流场网格示意图
2.4. 网格无关性验证
对无人机流场进行网格无关性验证,此时外流场的工作状态为:来流速度V0 = 68 m/s,分别改变机翼表面最大面网格尺寸为6 cm、4 cm、2 cm、1 cm,对应的体网格数量为:284万、346万、455万、627万。图3、图4为无人机升力系数与阻力系书的网格无关性曲线图,当桨叶面网格尺寸小于2 cm (体网格 455万)之后,计算所得力系数的波动已经很小,平衡计算精度与时间后对无人机的计算均采用2 cm的最大面网格尺寸设置。
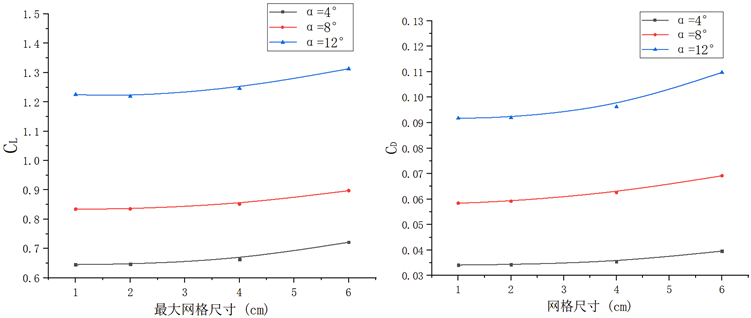
Figure 3. The trend of lift/drag coefficient with mesh size
图3. 升/阻力系数随网格尺寸的变化趋势
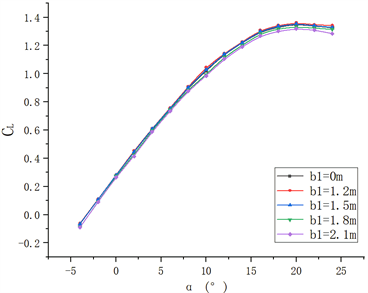
Figure 4. Lift coefficient curve of the joined wing UAV
图4. 联接翼无人机升力系数曲线
3. 计算结果分析
3.1. 升/阻力特性
图4给出了后翼外形变化对无人机升力系数的影响,图示中b1表示后翼内段平直翼面的展长。可以看出b1的大小对整机升力系数的影响很小,在0˚~6˚迎角范围内,整机升力系数随着b1长度的增加只有极小幅增加;从图5给出的前、后翼升力系数曲线可以看出,虽然随着b1的增加,前、后翼的水平间距与垂直间距增加,但前翼的升力系数基本不受b1的影响,后翼的升力系数则有小幅提升,此时前翼对后翼的下洗作用有所减弱,由于前翼的升力贡献占比远大于后翼,后翼的升力增量对整机而言并不明显。在8˚~24˚迎角范围内升力系数随着b1长度变化的趋势较为复杂,由于平直翼中小迎角下的升力特性好于后掠翼,此时由于内段平直翼长度增加,后翼升力增加,但当平直翼段的展长增加到一定成程度后,由于后翼外段的前掠角的增长幅度也随之增大,机翼升力线斜率降低,因此整机升力系数先随在 取值增加呈增长趋势,并在b1 = 1.5 m时取得最大值后随b1取值的进一步增加而减小。
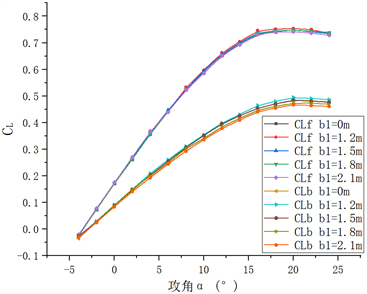
Figure 5. Lift coefficient curve of front/rear wing
图5. 前、后翼升力系数曲线
图6、图7给出了后翼外形变化对无人机阻力系数的影响。可以看出,在α < 16˚的范围内,随着b1的增大整机阻力系数逐渐减小,但减小幅度稳定在2%以内,不影响整机阻力系数的发展趋势,从图7中可以看出,在此迎角范围内后翼的阻力减小是整机阻力系数减小的主要因素,此时前翼阻力系数基本不受b1的影响。在迎角α > 16˚之后,后翼阻力系数随b1的增加而出现小幅度增长,并且随着迎角的增大阻力系数的增长幅度也有所增大,这是由于随着b1的增加,使得平直翼段失速面积增大,使后翼阻力增加。
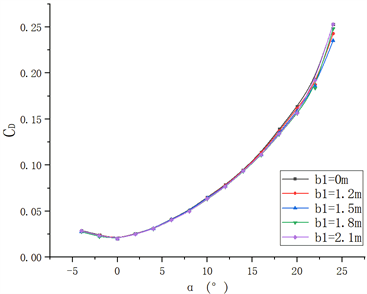
Figure 6. Drag coefficient curve of the joined wing UAV
图6. 联接翼无人机阻力系数曲线
图8为无人机整机升阻比曲线,从图中可以看出,在小迎角下随着后翼内段平直翼长度的增加,前、后翼水平、垂直间距有所增加,后翼受前翼下洗作用减弱,无人机的最大升阻比有所增加,取b1 = 1.8 m时,升阻比最大可增加约3.3%。但随着迎角的增大,后翼内段平直翼上表面的气流分离区域增大,b1的增加使得无人机阻力系数增长更快,无人机升阻比开始随后翼内段平直翼长度的增加而下降。
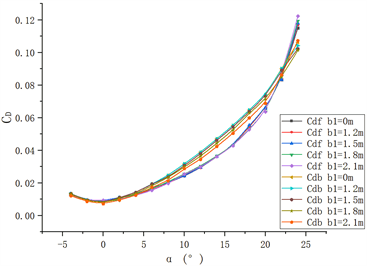
Figure 7. Drag coefficient curve of front/rear wing
图7. 前、后翼阻力系数曲线
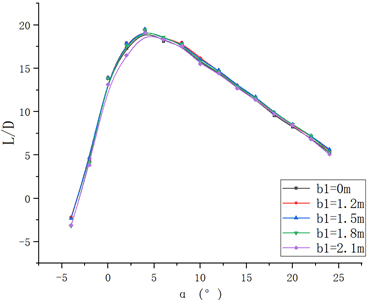
Figure 8. Lift-drag ratio curve of the joined wing UAV
图8. 为联接翼无人机整机升阻比曲线
由于前翼参数、前后翼翼根间距、后翼几何弦长保持不变,只通过改变后翼内段的平直翼长度来改变后翼形状,此时后翼的投影面积不变但浸湿面积随着内段平直翼长度的增加而增大。增加前后翼垂直距离可进一步减小盒翼的诱导阻力,但机翼浸湿面积的增加也会增大摩阻,由于翼根位置固定,当b1大于一定数值时,b1对前后翼间距的增长的影响小于对机翼浸湿面积的增长的影响,而摩擦阻力却是一直是增大的,使得整机升阻比随b1增长而降低。
3.2. 俯仰力矩特性
图9给出了后翼外形变化对整机俯仰力矩系数的影响。可以看出,在采用分段式设计之后整机的俯仰力矩系数的发展趋势没有发生变化,在迎角α < 12˚时,变形前后的整机俯仰力矩系数均表现出较好的线性特征。相比初始构型,随着b1的增加无人机低头力矩系数不断增大,在b1 = 1.8 m时,俯仰力矩系数增长了约14%。其原因是由于随着后翼内段平直翼长度的增加,后翼外段前掠角增大,前、后翼的水平、垂直间距增加,后翼受前翼下洗影响相对减小,后翼升力增加,同时后翼气动中心后移,作用力臂变长,使低头力矩增大。在迎角12˚ < α < 24˚时,随着 的增大,后翼外段的前掠角也不断增大,临界迎角推迟,力矩上扬的迎角后延。但由于平直翼失速迎角小于前掠翼,机翼上表面的气流分离区域随迎角增大而迅速增加,随着b1的增大后翼升力损失速度加快,当b1大于1.8 m时,飞机低头力矩开始减小,相比b1 = 0 m构型,俯仰力矩系数曲线的上扬幅度更大。
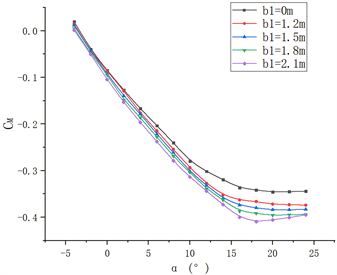
Figure 9. The pitching moment coefficient curve of the joined wing UAV
图9. 为联接翼无人机俯仰力矩系数曲线
图10、图11给出了b1 = 0 m、b1 = 1.8 m两种外形下俯仰力矩系数Cm随操纵面作动角度δ的变化曲线。此时升降舵弦长取后翼弦长的25%,左、右升降舵展长均取1.7 m。如图10、图11所示,俯仰力矩系数随升降舵偏转角度变化接近线性规律,随着舵偏角度的增大,低头力矩增加,在α < 14˚时,相同操纵面在不同迎角下的俯仰力矩曲线近似平行,说明控制效率随迎角变化不大。同时由于作用力臂边长以及翼面升力的增加,相同升降舵偏转角度下,b1 = 1.8 m构型下的俯仰力矩系数变化值要明显大于b1 = 0 m构型,三个偏转角度下的平均提升幅度约为14%。左右。
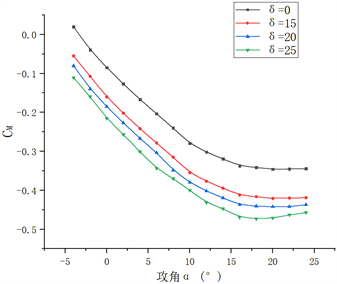
Figure 10. Schematic of variation of pitching moment coefficient of the UAV with angle of attack for different elevator deflection angles when b1 = 0 m
图10. 为b1 = 0 m时无人机纵向俯仰力矩系数随迎角的变化曲线
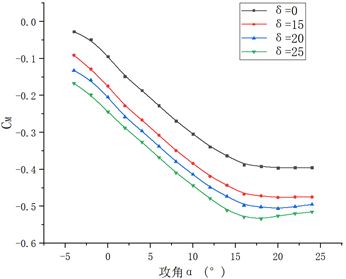
Figure 11. Schematic of variation of pitching moment coefficient of the UAV with angle of attack for different elevator deflection angles when b1 = 1.8 m
图11. 为b1 = 1.8 m时无人机纵向俯仰力矩系数随迎角的变化曲线
4. 结论
1) 在其它参数不变的情况下,后翼采用内段平直翼设计对该联接翼布局无人机的升阻特性影响较小,部分由前后翼水平、垂直间距增加带来的下洗气流干扰减少的效益被因浸湿面积增加而导致摩擦阻力增加等因素所抵消。
2) 当b1取值处于一定范围内时,后翼的分段设计不改变整机在中小迎角下的俯仰力矩的特性,随着平直翼段展长的增加,整机低头力矩系数在中小迎角下的线性变化范围增大,升力失速较为缓和,这对改善整机在中小迎角下的俯仰控制有利。当b1取值超出范围内时,在临界迎角之后整机俯仰力矩系数的上扬趋势增大。
3) 当b1取值处于一定范围内时,由于前后翼水平、垂直距离的增大,后翼的升力增大,气动中心后移,作用力臂变长,飞机的俯仰稳定性增加。同时作用力臂变长也使得平直翼上的升降舵具有更强的舵效,中小迎角下的俯仰力矩系数提升明显,这对提高飞机的配平升阻比比较有利,但在大迎角下俯仰力矩系数的上扬趋势增大。因此在采用此类方案时需要考虑飞机对飞行仰角范围内的俯仰稳定性要求,对后翼内段平直翼长度参数进行优化设计。