1. 引言
太阳能帆板在完全展开状态下为典型的挠性结构,在外部干扰(如空间碎片、太阳风、热辐射、温度冲击)和内部干扰(卫星自身的姿态调整、变轨运动以及卫星自身内结构的活动等)的作用下极易产生微振动,由于太空环境为低阻尼的状态,振动难以得到快速衰减,长时间的持续振动不仅会造成敏感构件的破坏,而且还会影响到通信卫星主体的指向精度和姿态稳定对卫星姿态控制造成非常不利的影响。因此为了保证精度指标的有效性,对太阳能帆板微幅振动快速抑制势在必行。振动抑制目前有被动、半主动、主动振动抑制[1]。被动控制不需要从外部输入能量,而是利用隔振、消振设备等器件被动地吸收、消耗振动能量的控制方法,这种方法对于抑制高频振动有一定的效果。尽管该方法容易实现,并且结构简单。但如果涉及到增加结构阻尼,就要考虑增加系统的刚度,由于材料的限制,必然会增加系统重量。与此同时当柔性结构发生振动时,根据被动控制抑制振动的原理是依靠阻尼层产生的应变而将振动的能量转化为应变能以热量的形式进行耗散,系统为了增加散热效果,就必须增加一定的柔性悬臂梁振动主动控制的实验研究重量。故被动控制效率偏低,而最重要的是如果采取被动控制抑制结构的振动的 这种方式,一旦设计、制作完成后,将不能适应系统、环境等不断发展的要求从而使其性能发生改变。为了克服被动控制方法的缺点,所以人们又想到了主动控制[2]。主动控制是根据外界激励和结构响应估计所需的控制力,从外界获得输入能量使执行器施加反作用力来达到抑制结构振动的控制。这种方法适合于低频振动控制,而且能够根据外界环境变化实时调整控制信号,以达到消除或抑制结构振动目的。其特点是:控制器具有修改方便、抑制低频振动效果好,对未知干扰适应能力强,在结构上轻且小,结构阻尼比高,消耗振动能量迅速等显著优点。
国内外对板形结构的动力学建模和振动的控制已有不少的研究[3] [4] [5],其中在动力学建模方面已有成熟的理论指导。在智能抑振设备的选择方面,有着各种各样的尝试,其中主要有控制力矩陀螺,压电智能材料等,在压电智能材料未得到应用之前,采用线圈作动的力矩陀螺作为主要的抑振方式被应用在帆板的振动抑制上。但是由于本身结构的限制,力矩陀螺的数量增加,载重质量也同样增加,给火箭发射带来负担。并且由于控制电压的变化特性,线圈的作动次数频繁,影响力矩陀螺的使用寿命。随着压电材料的发展,PZT (piezoelectric)压电陶瓷[6]也应用到了航空航天工业,PZT材料自身质脆,适合在实验室实验应用,但是面临发射升空时的大载荷,很难保证不会损坏,所以美国NASA设计研发了一种既具有压电材料具有的压电效应,又能承受载荷的材料(后授权SmartMaterial公司生产改进),MFC (Macro Fiber Composite)压电复合纤维。
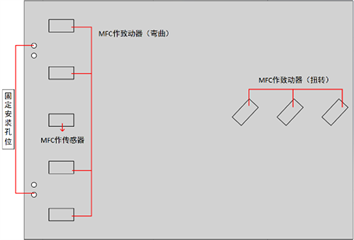
本课题立足于MFC的正逆压电效应,将MFC作为传感器和致动器。MFC作为传感器根据正压电效应,采集帆板振动信号,MFC作致动器需要使用驱动器提供高电压驱动,MFC粘接在帆板上,MFC通过逆压电效应产生的力,将直接作用在帆板上用于抵消由于外部干扰产生的力。这里为了抑制太阳能帆板的弯曲振动和扭转振动,采用方便调试的PID算法,编程软件采用Labview图形化编程软件。最后将实验结果和仿真分析对比,调整实验参数,以达到优化控制参数的目的。
2. 动力学建模
在搭建样机之前,需要对实验系统进行仿真分析,以验证实验的可行性。其中就需要搭建帆板的动力学模型。搭建动力学模型并通过hyperworks进行模态分析,提取帆板的振型,主要是前两阶的弯曲振动频率和前两阶扭转振动的频率。然后MFC作传感器时,根据正压电效应得到形变和开路电压的关系,MFC作致动器时,根据逆压电效应,求出MFC上的作动力和驱动电压的关系。最后,综合得到的薄板动力学方程,正/逆压电效应推导的方程,得到整个控制系统的,状态空间方程。
2.1. 薄板结构动力学建模
本课题,薄板建模采用的是经典的板结构理论(CPT)或者克希霍夫(Kirchhoff)理论。对薄板进行有限元建模,得到板单元的动力学方程为:
(1)
其中
为板单元的质量矩阵,
为节点位移变量,
为单元刚度矩阵,
为单元的力矢量。在实际系统中含有阻尼效应,在系统的整体结构动力学方程中加入瑞丽阻尼项
,得到整体的结构动力学方程为:
(2)
式中,
和
分别为板结构整体的质量矩阵和整体的刚度矩阵,
为瑞丽阻尼矩阵,
、
分别为瑞丽质量阻尼系数和瑞丽刚度阻尼系数,
为外部的力矢量。
2.2. MFC作传感器方程
MFC根据正压电效应来俘获能量,并将其转换为电信号。帆板振动时,对于传感器MFC来说,受到交变的激励使其变形,则MFC将产生交变的电荷。MFC压电复合纤维满足电学短路、机械自由的条件,故采用第一类的压电方程研究其输出信号与各因素之间的关系,压电方程[7]为:
(3)
其中,
为电位移量;
为压电常数;
为应力值;
为介电应变常数的转置矩阵量;
为电场强度。
对于MFC压电复合纤维,因其厚度原因,电极无法从侧端引出,外加电场也不存在,并且MFC主要在长度方向上受力,故式(3)可简化为:
(4)
则MFC产生的电荷量为:
(5)
其中,
为MFC的弹性模量;
为应变值;
为MFC的表面积。
则MFC产生的电压为
(6)
式中,
为压电复合纤维的等效电容。
2.3. MFC作致动器方程
MFC作致动器式时,根据逆压电效应,MFC产生的作动力
可表示为[8]:
(7)
其中,
为加载在MFC上的电压,
为力因子。
(8)
其中,
为MFC开路电压与梁末端位移之比。
2.4. 整体模型的控制状态空间方程
联立式(2),和(7),可以得到含有MFC的结构振动微分方程:
(9)
联立(6)可得:
(10)
设状态变量
,则式(10)可表示为状态空间形式:
(11)
式中,
,
,
,
。
3. 程序设计
为了方便调试和实时观测数据变化,本课题采用Labview图形化编程语言进行编程,该语言具有,识读方便,容易纠错,开发便捷等优点。在程序开发过程中,可以通过前面板实时观测数据变化,方便调试。根据实验要求,程序分为激励信号产生部分,振动波形反馈显示部分,振动主动抑制算法部分,测量数据存储部分。下面就各个部分分别阐述。
3.1. 激励信号产生部分
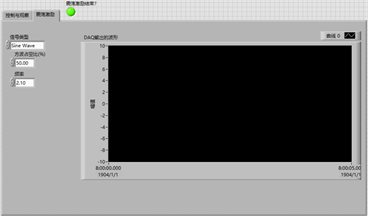
为了振动抑制前后效果对比,需要加控制和不加控制,有相同的激励信号,为此编程如图1:
根据AMD驱动板的驱动电压参数[9],输出电压区间在0~5 V之间,输出波形可选,正弦波,方波,三角波,输出频率0~5 kHz。激振信号持续时间为10 s。
3.2. 反馈信号读取部分s
要形成闭环控制,必须将信号通过信号采集设备,将信号读取回上位机,同时也能直观的在显示器上观察帆板振动的波形,如下图2所示:
波形的采集采用差分输入的形式,可以有效的减少输入的共模干扰,同时为了精确的采集各个时间点的电压,采用1通道1采样的方式,进行数据采集。
3.3. 振动主动抑制算法部分
在实验时,为了调节方便和前期的测试稳定性,采用工业上常用的PID控制算法。连续型PID控制器的一般表达形式为:
(12)
由于计算机控制是一种离散的采样控制,在计算机控制系统中也必然是数字形式的控制器,所以将连续的表达式,通过差分形式表达如下:
(13)
将该公式写入通过Labview程序描述如图3所示:
3.4. 数据保存程序
为了在实验之后对实验的数据进行分析,需要在实验时保存实验数据,程序如图4所示:
该程序能将实验过程的绝对时间,MFC读取的数据,PID控制处理并输出的数据等保存在提前设置好路径的Excel表格中,方便后期对数据进行处理。
4. 仿真与实验
本课题根据实际太阳翼帆板[10]尺寸,裁剪环氧树脂板作为实验对象,尺寸为660 mm * 480 mm (长 *宽)。如图5所示,图5(a)为在solidworks中创建的帆板模型,图5(b)为整体样机。
 (a)
(a) 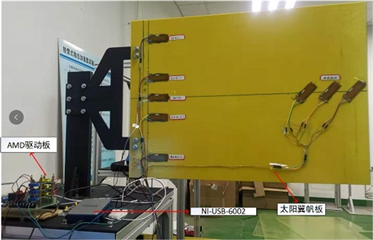 (b)
(b)
Figure 5. The model of solar panel is compared with the real object. (a) Sailboard model; (b) Vibration suppression prototype system of sailboard
图5. 太阳翼帆板模型与实物对照。(a) 帆板模型;(b) 帆板抑振样机系统
MFC采用SmartMateral公司代理生产的M4312-P1型,其材料特性和环氧树脂板的材料特性[11]如下表1所示:

Table 1. Material parameter table of M4312-P1 and experimental sailboard
表1. M4312-P1和实验用帆板材料参数表
将帆板模型导入hyperworks中仿真分析,通过分析文献,了解到主要影响帆板振动状态的为前四阶振型,得到的前四阶如图6所示:

Figure 6. The first four modes of modal analysis of sailboard
图6. 帆板模态分析的前四阶振型
分析得到的振型,如表2所示。
由表分析可知,帆板共振频率在2.3 Hz左右,调节Labview中激励发生器的输出频率,经过实验,当频率在2.1 Hz时产生的振幅效果最好,控制前面板如图7所示。
上电分别输出无控制加入(即自由衰减震荡)和有控制加入之后,通过数据保存程序,将振动过程的状态保存在excel中,进一步处理之后,比较两种有无控制的状态,如图8所示。激振10秒后,取消激振输入,可以明显看出,振动抑制效果[12]。
Table 2. Analysis of the first four modes of the sailboard by Hyperworks
表2. Hyperworks分析帆板的前四阶振型
 (a)
(a) 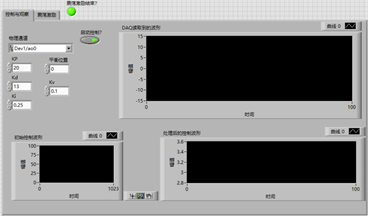 (b)
(b)
Figure 7. Active vibration suppression front panel. (a) Front panel display excitation; (b) Front feedback control panel with PID
图7. 帆板振动主动抑制前面板。(a) 激励输出显示前面板;(b) PID反馈控制及显示前面板
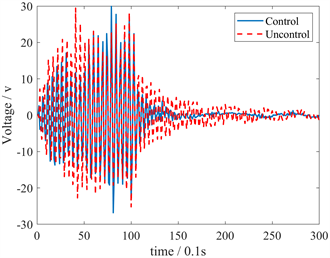
Figure 8. Comparison of free vibration and active vibration suppression of sailboard
图8. 帆板自由振动和主动抑振对比
5. 总结
本课题首先通过三维制图软件建模,然后将模型导入hyperworks对帆板模型进行了模态分析,并导出四阶模态的振型图和模态具体参数。然后通过Labview编写所需的各个模块的程序,分别包括,数据反馈采集模块,激励发生模块,数据保存模块,PID算法转化模块。并且分别测试了各个模块的功能。最后,搭建实验样机,通过对前期分析的参数设置激振频率,并通过调节PID的各项参数[13],达到良好的控制效果。通过样机实验,验证了太阳翼帆板主动抑振的可行性,特别是对帆板的小幅振动,有非常明显的抑制效果,并且由于MFC本身材料的特性,可以大大提高主动抑振系统在太空中的寿命。本课题旨在验证太阳翼帆板振动主动抑振方案的可行性,后期根据实际情况,需要验证多块帆板铰接的振动主动抑制,考虑到太空中的低功耗,还有运载时质量的限制,需要对控制器进行小型化,轻量化设计。
参考文献
[1] 欧进萍. 结构振动控制——主动、半主动和智能控制[M]. 北京: 科学出版社, 2003.
[2] 张思马. 基于激光位移传感器测量的柔性板振动控制研究[D]: [硕士学位论文]. 华南理工大学, 2016.
[3] 杜平安, 于亚婷, 刘建涛. 有限元法: 原理、建模及应用[M]. 北京: 国防工业出版社, 2011.
[4] Rivers, M.B. and Balakrishna, S. (2014) NASA Common Research Model Test Envelope Extension with Active Sting Damping at NTF. AIAA, 3135. https://doi.org/10.2514/6.2014-3135
[5] Thomson, M.W. (2002) AstroMesh Deployable Reflectors for Ku- and Ka-Band Commercial Satellites. 20th AIAA International Communication Satellite Systems Conference and Exhibit. https://doi.org/10.2514/6.2002-2032
[6] Alaimo, A., Milazzo, A. and Orlando, C. (2016) A Smart Composite-Piezoelectric One-Dimensional Finite Element Model for Vibration Damping Analysis. Journal of Intelligent Material Systems & Structures, 27, 1362-1375. https://doi.org/10.1177/1045389X15591380
[7] Kiran, R., Kumar, A., Kumar, R., et al. (2018) Poling Direction Driven Large Enhancement in Piezoelectric Performance. Scripta Materialia, 151, 76-81. https://doi.org/10.1016/j.scriptamat.2018.03.029
[8] Kiran, R., Kumar, A., Kumar, R., et al. (2019) Effect of Poling Direction and Porosity on Piezoelectric Figures of Merit: A Numerical Study. European Physical Journal Plus, 134, 103. https://doi.org/10.1140/epjp/i2019-12458-8
[9] Lezgy-Nazargah, M. (2016) Efficient Coupled Refined Finite Element for Dynamic Analysis of Sandwich Beams Containing Embedded Shear-Mode Piezoelectric Layers. Mechanics of Advanced Materials and Structures, 23, 337-352. https://doi.org/10.1080/15376494.2014.981617
[10] Sharma, S., Kumar, A., Kumar, R., Talha, M. and Vaish, R. (2020) Active vibration Control of Smart Structure Using Poling Tuned Piezoelectric Material. Journal of Intelligent Material Systems and Structures, 31, 1298-1313. https://doi.org/10.1177/1045389X20917456
[11] Kiran, R., Kumar, A., Kumar, R. and Vaish, R. (2018) Poling Direction Driven Large Enhancement in Piezoelectric Performance. Scripta Materialia, 151, 76-81. https://doi.org/10.1016/j.scriptamat.2018.03.029
[12] Zhu, Y., Zheng, X., Li, L., Yu, Y., Liu, X. and Chen, J. (2017) Evaluation of Shear Piezoelectric Coefficient d 15 of Piezoelectric Ceramics By Using Piezoelectric Cantilever Beam in Dynamic Resonance. Ferroelectrics, 520, 202-211. https://doi.org/10.1080/00150193.2017.1388838
[13] Chen, D., Carter, E. and Kamlah, M. (2016) Deformation Behavior of Lead Zirconate Titanate Ceramics under Uniaxial Compression Measured by the Digital Image Correlation Method. Smart Materials and Structures, 25, Article ID: 097001. https://doi.org/10.1088/0964-1726/25/9/097001