1. 引言
在平面四杆机构(含曲柄摇杆机构、双摇杆机构)中有一类机构能够实现近似直线运动轨迹,如在港口广泛使用的门座式起重机 [1] [2]、物流行业的垂直上下传递输送物料的装置 [3],在选矿机械的直线筛分机器、冶金企业轧钢系统中的推钢机的机械传动、工业企业的钢材送入加热炉的送料搬运机械系统 [4] [5] [6] 中。
2. 近似直线机构的运动轨迹分析
机构分析方法在过去普遍使用图解法 [4] - [10],随着计算机技术的普及,解析分析法 [2] [11] [12] 得到了广泛应用。图1所示为一近似直线机构,它由曲柄
、连杆
、摇杆
和机架
组成,在满足一定的条件下,连杆
的延长线的D点可得到近似直线运动轨迹。
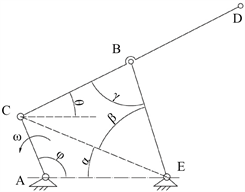 α为铰点C和铰点E的连线CE与机架的夹角;β为连线CE与摇杆
的夹角;γ为连杆
与摇杆
的夹角,此即为该机构的传动角;θ为连杆
(包含其延长线
)与水平线的夹角;φ为曲柄
与机架
的夹角(逆时针为正);
为曲柄
的长度;
为连杆
的长度;
为摇杆
的长度;
为机架
的长度;
为连杆
延长线的长度。
α为铰点C和铰点E的连线CE与机架的夹角;β为连线CE与摇杆
的夹角;γ为连杆
与摇杆
的夹角,此即为该机构的传动角;θ为连杆
(包含其延长线
)与水平线的夹角;φ为曲柄
与机架
的夹角(逆时针为正);
为曲柄
的长度;
为连杆
的长度;
为摇杆
的长度;
为机架
的长度;
为连杆
延长线的长度。
Figure 1. Geometrical relationship of approximate straight-line mechanism
图1. 近似直线机构的几何关系图
为了得到D点的运动轨迹,分二种情况讨论:
(1) 曲柄
在0˚~180˚范围内
因曲柄
可在360˚范围活动,摇杆
只在有限范围内摆动,四边形AEBC的构型也会发生很大的变化。
此时,在图1中连接铰点C和铰点E,由余弦定理可求解得连线CE的长度
:
(1)
式中:φ为曲柄
的转动角(输入角)。
由三角形△ACE,据余弦定理可求得α角:
(2)
再据三角形△CBE,由余弦定理可求得β角:
(3)
同理,可求得该直线机构的传动角γ:
(4)
传动角γ能很好地说明该水平直线机构的传动特性。
连杆
(包含其延长线
)与水平线的夹角θ可由式(5)求得。
(5)
所以,点D的轨迹方程即得。
(6)
(2) 曲柄
在180˚~360˚范围内
当曲柄
在180˚~360˚活动时,四边形AEBC的构型变化了,所以其几何关系发生了较大的变化,见图2所示。

Figure 2. Schematic geometrical relationship of approximate straight-line mechanism
图2. 近似直线机构的几何关系示意图
由图2可知,此时的夹角θ应该由式(7)求解得到。
(7)
点D的轨迹方程也有变化,可由式(8)得到。
(8)
3. 摇杆
的摆角分析
摇杆
虽然只在有限范围内摆动,但其摆动角
(与水平线的夹角,逆时针为正)关系式:
(1) φ在0˚~180˚时
(9)
(2) φ在180˚~360˚时
(10)
4. 案例分析
分析案例1。据文献 [3]、 [5] 的信息有:
;
。为便于在MATLAB软件平台上编程实现,为方便分析,取
单位量,表1为分析计算的结论,其轨迹输出可见图3和图4,图5为其摆角变化,图6为该直线机构的传动角变化。
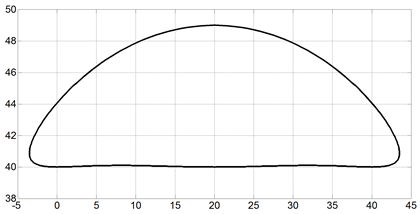
Figure 3. Motion curve of point D (
)
图3. D点的轨迹图(φ在0˚~360˚变化)
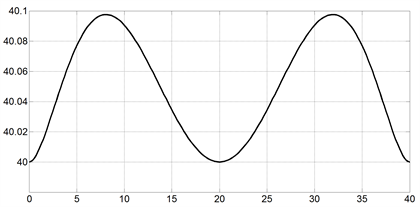
Figure 4. Motion curve of point D (
)
图4. D点的轨迹图(直线段,φ在90˚~270˚变化)

Table 1. Results of analysis on two cases
表1. 案例分析的结论
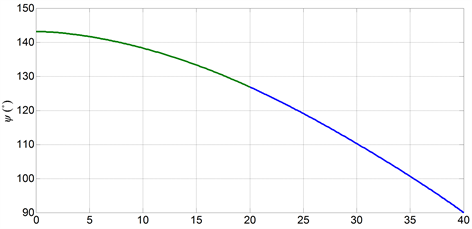
Figure 5. Result of swing angle ψ of rocker
图5. 摇杆
的摆角ψ输出图
分析案例2。据文献 [6],其已知数据有:
;
。为便于比较,同样地,取
单位量。其输出结论如表1和图7~9所示。
二个案例分析表明:
在同样的曲柄活动范围(即φ在90˚~270˚变化),比较图4和图7,其D点的输出直线段的有效区间:案例1的直线段长为40单位,案例1的垂直方向差值为0.0975单位,相对差值(垂直方向差值/直线段)0.002438;案例2的直线段长度为46.4758单位,垂直方向差值为0.4317单位,相对差值(垂直方向差值/直线段)为0.002648;显然,案例1比案例2的要好。要保持较好的直线度值,案例2的活动区间就必须缩小。
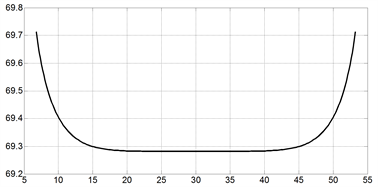
Figure 7. Motion curve of point D (
)
图7. D点的轨迹图(直线段,φ在90˚~270˚变化)
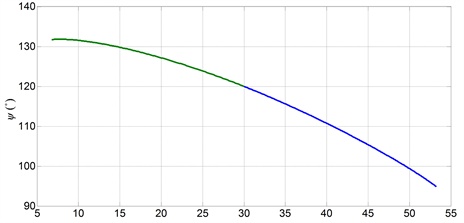
Figure 8. Result of swing angle ψ of rocker
图8. 摇杆
的摆角ψ输出图
5. 结论
运用解析分析的方法对近似直线机构进行了运动学分析,得到了该近似直线机构的运动轨迹方程、传动角、摆角等重要的信息,为具体的机构选型与设计打下了扎实基础,方便项目的概念设计和方案设计实施。
(1) 在同样的曲柄活动范围(即φ在90˚~270˚变化),案例1的直线段长的区段比案例2的要大一些;案例1比案例2的要好。
(2) 摇杆
的摆角输出,随尺寸的增大而输出相应的变小;案例1优于案例2。
(3) 传动角的变化趋势也是随尺寸增大而输出变小,这说明案例1的传动性能更佳。
(4) 案例1的综合性能比案例2更好,直线度更好一些,直线段的区域更大。
附录:程序代码
% MATLAB 实现程序
% AC为曲柄(主动件,φ为输入角)
% C、B、D在一条直线上;机架为AE;摇杆为EB
% CB=EB=BD=2.5*AC;AE=2*AC
%求D点的轨迹
clc;
AC=10;
CB=2.5.*AC;
EB=2.5.*AC;
BD=2.5.*AC;
AE=2.*AC;
phia=[0:2:180]*pi/180; %曲柄输入角在0到180°时
CE=sqrt(AC.*AC+AE.*AE-2.*AC.*AE*cos(phia)); %计算CE长度
alph=acos((CE.*CE+AE.*AE-AC.*AC)./(2.*CE.*AE)); %α
beta=acos((CE.*CE+EB.*EB-CB.*CB)./(2.*CE.*EB)); %β
gama =acos((CB.*CB+EB.*EB-CE.*CE)./(2.*CB.*EB)); %γ传动角
sita=pi-(alph+beta)-gama;
gama11= gama*180/pi;
baijiao=(pi-(alph+beta))*180/pi;%摇杆的摆角输出(°)
xd1=AC.*cos(phia)+(CB+BD).*cos(sita); %D点的横坐标
yd1=AC.*sin(phia)+(CB+BD).*sin(sita); %D点的纵坐标
phia1=[180:2:360]*pi/180; %当曲柄输入角在180°到360°时
CE1=sqrt(AC.*AC+AE.*AE-2.*AC.*AE*cos(2.*pi-phia1)); %计算CE长度
alph1=acos((CE1.*CE1+AE.*AE-AC.*AC)./(2.*CE1.*AE)); %α
beta1=acos((CE1.*CE1+EB.*EB-CB.*CB)./(2.*CE1.*EB)); %β
gama1=acos((CB.*CB+EB.*EB-CE1.*CE1)./(2.*CB.*EB)); %γ传动角
sita1=pi-(beta1-alph1)-gama1; %注意:几何关系变化
gama11= gama1*180/pi;
baijiao1=(pi-( beta1-alph1))*180/pi; %摇杆的摆角输出(°)
xd2=AE-EB.*cos(beta1-alph1)+BD.*cos(sita1); %D点的横坐标
yd2=EB.*sin(beta1-alph1)+BD.*sin(sita1); %D点的纵坐标
plot(xd1,yd1,xd2,yd2)%绘制轨迹图
grid