1. 引言
踝关节作为人体最大的承力关节且参与运动,极易损伤,其术后康复训练至关重要 [1]。近年来,随着康复机器人技术的发展,新型踝关节康复机器人大量涌现,其中不少已成功推向市场,极大提高了踝关节的康复治疗水平。
本文查阅了踝关节康复机器人国内外相关文献,从功能和结构形式对其进行分类介绍。
2. 踝关节康复机器人的功能与结构
踝关节是下肢中结构和功能最复杂的关节,兼具力量、稳定性与灵活度。一般指的是由胫距关节、距跟关节及大量韧带所组成的关节复合体 [2],能完成背伸/趾屈、内翻/外翻和内收/外展三自由度旋转运动(如图1)。从关节活动度看,背伸/趾屈最大,内翻/外翻最小。依据不同的情况,在康复训练时,有时只需进行单自由度康复训练,有时则需要多自由度的复合式康复训练。
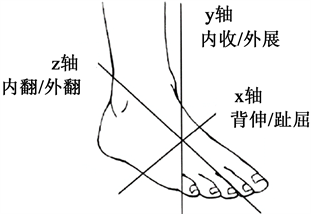
Figure 1. Movement mechanism of ankle joint
图1. 踝关节运动机理
2.1. 单自由度踝关节康复机器人
单自由度踝关节康复机器人可以分为三类:踝关节CPM、穿戴型和绕环运动型。
踝关节CPM (Continuous Passive Motion)有许多著名康复器械公司如Chattanooga、Kinetec等。可为术后患者提供背伸/趾屈的康复训练,也可提供内收/外展的康复训练(图2左)。国内的吴俊鹏 [3]、周志昭 [4] 等人也设计了可进行踝关节背伸/趾屈训练的单自由度踝关节康复机器人,并对其构造和电机控制方法进行了研究(图2中、右)。
穿戴型单自由度踝关节康复机器人,通常应用于需要随人行走的场合,可以帮助穿戴者抬脚和落脚。例如日本安川电机公司提供该产品Cocoroe ADD [5] (图3左)。国内余晖 [6] 等人也开发了穿戴型被动式(由机构驱动)单自由度踝关节康复机器人(图3右)。

Figure 3. Wearable ankle rehabilitation robot
图3. 可穿戴型踝关节康复机器人
环绕运动型踝关节康复机器人的旋转盘垂直于脚尖布置,可驱动踝关节做环绕康复训练。例如意大利生产的多功能踝关节训练康复器Medi-slippe [7] (图4)。该训练器除了提供踝关节的被动环绕康复训练外,还有趾屈/背伸与内收/外展的主动式阻抗训练功能。

Figure 4. Multi-functional ankle joint training rehabilitation device Medi-slipper
图4. 多功能踝关节训练康复器Medi-slipper
上述单自由度踝关节康复机器人已经广泛应用于踝关节康复训练中。这主要得益于其具有结构简单、概念明确、安全性好、使用时易于调节等优点。此外,通过增加传感器及智能控制单元,生产厂家还使该类产品更加智能化。提供诸如康复训练评价、训练过程记录及主/被动康复训练等功能,使其更方便使用。
2.2. 多自由度踝关节康复机器人
当对踝关节康复训练有精准位置和运动轨迹要求,进行运动感觉训练时,需要采用多自由度踝关节康复机器人。从结构特征上可以分为三类:串联型、并联型和混联型。
串联型踝关节康复机器人的结构特征是在脚踏板上依次串联上三个空间分布的转动轴。当电机驱动三个转动轴时,脚踏板可实现空间的复合转动。韩国的Sangwoo Cho [8],国内的刘其洪 [9],陈川 [10] 等人设计了可进行这种复合转动的踝关节康复机器人。
其中,Sangwoo Cho所设计的(图5左)具有两个自由度,当脚踩在踏板上时可以实现由机构驱动的背伸/趾屈、内翻/外翻被动康复训练。此外,结构中加设了一个弧状导轨,使得脚部在进行内翻/外翻运动时会协同完成内收外展运动。
刘其洪等人所设计的新型踝关节康复机器人(图5中),最底层为一个伺服电机能够实现踝部绕竖直轴转动的内收和外展动作,中间为一个驱动电机用来驱动踝部的背伸和趾屈动作,最上层也是用一个电机驱动,以实现踝部的内翻和外翻动作。该装置的最大特点就是没有直接的转动副,设计者采用圆弧状导轨来实现机构回转中心和生理回转中心的重合,使得康复训练更加接近人体的生理运动,有利于患者的康复训练 [11]。
陈川所设计的一款健患侧融合踝关节康复机器人(图5右),该款康复设备采用三个“L”形结构串联而成,每个回转运动采用电机进行驱动,并且同样采用了弧状导轨的理念,使得机构回转中心和生理回转中心相重合。该设计的最大特点就是采用对称式设计,具备主动训练和被动训练两种康复训练模式,这就使得该设计能够实现健康一侧的脚踝带动受伤一侧的脚踝运动,达到健患侧融合训练的目的。另外,该设计增加了人机交互界面和虚拟训练场景,使得患者在康复过程中还能够有运动、游戏和日常活动的体验感。

Figure 5. Series ankle rehabilitation robot
图5. 串联型踝关节康复机器人
并联型踝关节康复机器人是在脚踏板下面采用并联机构支撑,通过协调驱动并联支链的运动,使踏板实现空间复合转动。因为并联机构具有刚度大、承载能力强、精度高等特点,成为国内外研究的热点 [12]。如图6所示,分别为美国的Z.M. Bi [13]、英国的JIANS.DAI [14] 以及国内的边辉 [11] 等人所设计的并联型踝关节康复平台。
上图中(图6左)Z.M. Bi所设计的一款踝关节康复球面并联机构,该机构包含一个定平台、一个动平台和四条支撑链组成。机构有三个自由度,分别由动平台下方的三个电机丝杠机构驱动,结构简单,控制相对方便,并能够实现踝关节的三个转动动作。
JIANS.DAI等人研究的一款并联踝关节康复平台(图6中)。为描述并联机构,将S (spherical)指球副,P (prismatic)指移动副,R (revolute)指转动副,U (universal)指万向节。则该款康复机构为包括移动平台、底座、3-SPS支链和一个中心支柱,SPS支链上有两个球形关节和一个移动关节作为弹性输入关节。中央支柱固定在基础平台上,并且与带有球形接头的移动平台互联。由于中心支柱限制了三个平移运动,移动平台保持三个转动自由度,所以该款康复机器人能够实现对踝关节的康复训练。此外,由于固定支柱和移动平台的球铰布置在动平台的底端,所以运动时结构的回转中心并不能和生理回转中心相重合。边辉等人开发的一款并联2-RRR/UPRR踝关节康复机器人(图6右),设计者基于生物融合理念并利用少自由度并联机器人型综合的约束螺旋理论设计了一种回转中心和生理回转中心相重合、可实现三维转动的并联踝关节康复机器人机构。该机构由一个动平台、一个定平台和三个支链组成,系统的回转中心聚于脚踏板之上,在进行康复训练时,能够保证该中心和生理回转中心重合。

Figure 6. Parallel ankle rehabilitation robot
图6. 并联型踝关节康复机器人
相比串联型踝关节康复机器人的设计,并联型踝关节康复机器人在驱动形式上更具多样性,除了电机驱动,还有液压驱动、气动肌肉等类型。例如禹润田等人设计的一款适用于脚踝康复三自由度绳驱动并联机构 [15] (图7左)、韩国Jungwon Yoon等人设计的一种新型的由液压驱动的可重构踝关节康复机器人 [16] (图7中),以及张明明等人开发的一种由气动肌肉驱动的卧式并联康复机器人 [17] (图7右)。其中,气动人工肌肉驱动的形式与传统的驱动方式不同,这种驱动方式是一种柔顺驱动器 [18],其驱动机理是模仿人体肌肉运动,由于能源清洁、使用简单、结构紧凑、质量轻等优点常被应用在一些可穿戴康复设备中。但又由于这种驱动方式的驱动精度较低,因此常常在应用领域上受到限制。

Figure 7. Parallel rehabilitation institutions with different driving forms
图7. 不同驱动形式的并联型康复机构
混联型踝关节康复机器人是在并联机构上再串联上一个回转自由度的装置。增加的回转自由度可以实现内收/外展的康复训练。例如王从泽等人提出的一种(3-SPS)&R混合式踝关节康复器 [19] (图8左),以及樊晓琴等人设计的一款(2-SPS+PU)&R混联式踝关节康复机器人 [1] (图8右)。
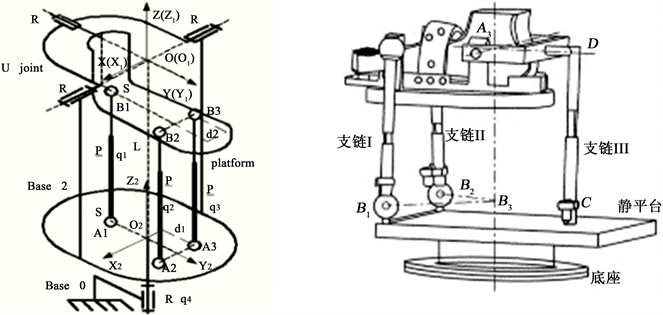
Figure 8. Hybrid ankle rehabilitation robot
图8. 混联型踝关节康复机器人
3. 结论与展望
综上所述,本文从功能和结构形式上,对踝关节康复机器人的国内外研究进行了分类介绍。
其中,单自由度踝关节康复机器人结构简单,使用时易于调节,许多研究已经成功实现了商品化,广泛应用于康复训练中。
多自由度踝关节康复机器人结构相对复杂,有串联、并联和混联三种类型。能够实现踝关节精确位置和运动轨迹控制,可以进行运动感觉训练,提供更高性能的康复训练。但是,因这种康复机器人结构复杂,使用时调节不便,限制了其应用的推广。
未来,随着人口老龄化及老龄人口的不断增加,踝关节康复机器人将面临不断增长的市场需求。踝关节康复机器人的开发需要在以下方向进行:首先是开发能普及到居家应用的产品。这需要追求更加轻便化、易用化及实用化。其次是开发能提供更高的功能的踝关节康复机器人产品。这需要继续深入研究,大力提高踝关节康复训练效果,并更加安全舒适。最后是需要提高踝关节康复机器人的智能化水平,使其更加易于使用。
NOTES
*通讯作者。