1. 引言
可穿戴外骨骼机器人是一种机构沿着人体外侧布置,能给穿戴者提供支撑和助力的机械装置 [1]。因外骨骼机器人能增强人的能力,在军事、医疗救护和抗震救灾方面有广泛的应用前景。例如在军事应用上,穿戴外骨骼可以在士兵运送弹药或长时间行军时为士兵提供助力,显著提升士兵的持续作战能力。在医疗救护应用上,瘫痪患者可以通过穿戴外骨骼机器人重新获得行走能力。护工人员通过穿戴外骨骼机器人能大幅度提高搬运能力,节省体力。在抗震救灾应用方面,救援者能通过穿戴外骨骼机器人,能在复杂恶劣环境中完成急难险重的救援工作。
近年来,国内外有许多可穿戴外骨骼机器人的研究。图1(a)为日本筑波大学研制的HAL,膝、髋、肩、肘关节均有电机直接驱动,靠读取大腿部肌电信号实现自动控制 [2]。图1(b)为美国洛克希德马丁公司为美军士兵开发的HULC,其膝、髋关节均为液压缸驱动,靠足底力传感器和关节转角传感器的信号来实现自动控制 [3]。图1(c)为以色列某公司研制的Rewalk Robotics步行助力机器人,电机驱动,可以帮助偏瘫患者进行步行康复训练 [4]。图1(d)为日本筑波大学研制的HAL腰部助力器。通过单电机驱动髋关节,实现大腿屈伸助力 [5]。
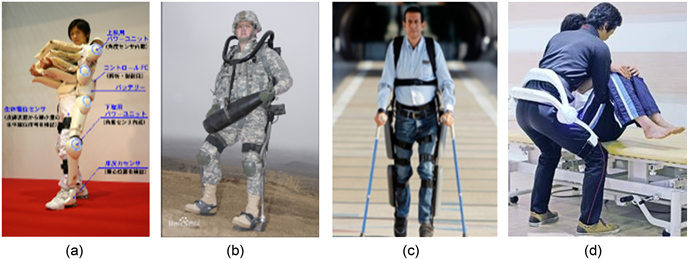
Figure 1. Representative research of wearable robot
图1. 可穿戴机器人代表性的研究
从上述研究中可见,为了减轻可穿戴机器人自重对穿戴者的压迫,图1(a)~(c)的设计都采用将可穿戴机器人的机构一直延伸到地面,由地面提供支撑的方案。其优点是穿戴者可以避免承重,但带来的缺点是增加了传动链的长度和传动关节的数量(膝关节、踝关节),并增加了控制的复杂性。图1(d)的设计没有连接到脚底的机构,省去了膝关节和踝关节,使得整体结构很简洁。然而该装置仅能为腰部助力,没有为上肢助力的功能。
为了能为护理人员在搬运病患时提供上肢助力,在前期研究中开发的一种气动自平衡式可穿戴搬运助力机器人,制作了试验样机并进行了穿戴搬运助力实验 [6]。在实验过程中发现,虽然上肢搬运助力非常有效,但由于缺少腰部助力功能,搬运人员腰部的负荷未能得到减轻,搬运时还是感到比较吃力。为此,本文在前期研究的基础上新增了腰部助力机构,开发一种新型多轴单自由度机构,可以实现搬运过程中为上肢和腰部助力。
2. 设计方案
可穿戴搬运助力机器人的结构如图2所示。机器人由肩部背带、平行四边形机构、自锁肘关节、前臂、水平导轨、水平滑块、竖直导轨、竖直滑块、臂部助力气缸(左右各一个)等构成上部机构。通过调整臂部助力气缸输出力大小,可实现机械臂的随遇平衡状态。在此状态下,操纵机械臂前后、上下方向移动所需的外力极小,且不需要控制系统的介入。这些机构与前期研究 [6] 基本相同。在本文中,我们新增了腰部助力机构、腰部助力气缸、钢绳、腰带、钢绳固定块等部分。其中,腰部助力气缸通过拉动钢绳为腰部提供助力扭矩,使腰直立起来。腰部助力机构为一个多轴单自由度机构,可以保证在不同弯腰角度下,机构均能与穿戴者腰部紧密贴合,并传递助力扭矩。腰部助力机构的下部通过腰带与人体骨盆绑定,上部与机器人主体相连。为了减轻可穿戴机器人的自重,机器人的主要部件尽量采用碳纤维型材与工程塑料3D打印件制作。同时为保证作业者穿戴的舒适性,机器人与人体接触部分,均采用软垫包裹。

Figure 2. Mechanism diagram of wearable handling assistance robot
图2. 可穿戴搬运助力机器人结构图
3. 腰部助力的多轴单自由度机构
为了将可穿戴机器人的上部机构与骨盆部的腰带相连,并能在弯腰时贴合人体转动,本文设计了一种多轴单自由度机构,如图3所示。由于该机构有多个转动轴,所以能与多块椎骨的腰椎部分保持很好贴合。由于是单自由度,所以该机构只需单个气缸驱动,就能实现确定轨迹的运动。
该机构由上部齿形件、齿形件2、齿形件1、下部齿形件构成前列结构。由上部齿形板、中部齿形板、下部齿形板构成后列结构。然后,前后列结构通过6个销轴相连接而构成。因为有交错布置的两列通过齿形啮合的齿形板,其总的回转自由度只有一个。该单自由度机构可以仿照人体脊柱的生理弯曲,实现弯腰运动过程中与作业者背部脊椎的紧密贴合。为了减少回转时的摩擦力,在销轴轴孔处均设置了滚动轴承。
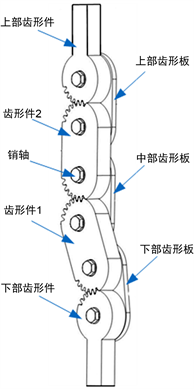
Figure 3. Multi-axis single-degree-of-freedom mechanism
图3. 多轴单自由度机构
通过运动分析对可穿戴搬运助力运动状态和运动范围进行确定,确定多轴单自由度机构各零件尺寸后,对弯腰范围进行分析。根据零件的运动范围进行建模,如图4所示。

Figure 4. Kinematic analysis of multi-axis single-degree-of-freedom mechanism
图4. 多轴单自由度机构运动分析
以下部齿形件销轴中心为原点,水平方向为X轴,竖直方向为Y轴,建立平面直角坐标系。以直立初始位置各轴中心点记为O1、O2、O3、O4、O5,转动后弯腰位置记为P1、P2、P3、P4、P5。设OO1与竖直方向夹角为β。经试算,对身高1.75米的人,取
β角取7.5˚,多轴单自由度机构的上部齿形件初始位于M位置。而当腰部前弯达45˚时,多轴单自由度机构的上部齿形件位于M1位置。在弯曲45˚情况下,相邻齿形件之间均顺时针旋转15˚。由此可以确定弯曲45˚状态下位置,起始位置为OO1O2O3O4O5,终止位置为OP1P2P3P4P5。
为验证该机构的运动范围,试制了腰部助力机构,如图5所示。左图为腰部直立时的机构与穿戴者背部贴合情况。右图为穿戴者腰部向前弯曲时的贴合情况。可见,从身体直立时脊柱略带反S型的形态,到身体弯曲时脊柱呈弧形的形态,腰部助力机构均能与穿戴者身体紧密贴合,可以满足使用的要求。

Figure 5. Diagram of multi-axis single degree of freedom mechanism wearing
图5. 多轴单自由度机构穿戴示意图
4. 机器人助力效果生物力学分析
4.1. 无助力情况下
为了对机器人助力效果进行定量分析,通过生物力学分析,分别计算了无助力和有助力两种情况下背部肌肉拉力和腰骶关节受力的情况。
在上身倾斜无助力的搬运状态中,人体上身向前俯下倾斜45˚,受力分析如图6所示。在脊柱受力最大的腰骶关节处为坐标原点建立生物力学模型,将人体看作一个悬臂梁结构。头部、颈部和臂膀的重力记为G1,位于脊柱腰骶关节以上躯干重力为G2,双手所持物料重力为W1。G1、G2、W1力臂分别为a1、a2、b1。腹压和腹肌纵向张力提供的内部抵抗力为f1,背部肌肉收缩力为f2。f1、f2力臂分别为b2、b3,与竖直方向夹角记α。脊椎所给的反作用力为R,R与竖直方向夹角记β。对腰骶关节进行受力分析,由力矩平衡可得:
(1)

Figure 6. Diagram of biomechanics of upper body biomechanics without assistance
图6. 无助力时上身生物力学简图
由力矩平衡可得:由水平方向力平衡,得到:
(2)
由竖直方向力平衡,得到:
(3)
根据以上生物力学分析公式,将实际的数据带入进行了计算。
在无助力情况下,搬运重物W1为8 kg、b1为558 mm;有关人体的参数我们参照参考文献 [7] 来选取。得到人体重力参数G1、G2分别为14 kg、23 kg;a1、a2分别为457 mm、178 mm;此时腹压产生的力f1的值7.45 kg、b2为114 mm;b3为51 mm。则由公式(1)可计算出无助力搬运时背部肌肉拉力f2
(4)
有公式(2) (3)可得腰骶椎处反力R的大小和角度β分别为
(5)
(6)
4.2. 有助力情况下
有助力受力状态如图7所示,此时上部机器人的重力记为W2、对应力臂为b4;机器人为躯干部分提供的转矩为M2。

Figure 7. Diagram of biomechanics of upper body biomechanics with assistance
图7. 有助力时上身生物力学简图
对腰骶关节进行受力分析,由力矩平衡得到:
(7)
由水平方向力平衡,得到:
(8)
由竖直方向力平衡,得到:
(9)
在有助力状态下,其他参数与无助力相同的情况下,机器人重量W2为7.2 kg、b4为250 mm;机器人为躯干部提供的转矩M2为9 kgm。则由公式(7)可计算出有助力搬运时背部肌肉拉力f2
(10)
(11)
(12)
由以上对比计算可发现,有助力情况下,背部肌肉收缩力由276.6 kg降为135.4 kg,为无助力的49%;腰骶关节受力由302.6 kg降为163 kg,为无助力的54%。这表明通过可穿戴搬运机器人的助力达到了减轻肌肉拉力和关节压力的良好效果。
5. 机器人试验样机及搬运助力实验
为了验证可穿戴搬运助力机器人的助力效果,试制了机器人试验样机,其整体穿戴效果如图8所示。

Figure 8. Test prototype of wearable handling assistance robot
图8. 可穿戴搬运助力机器人试验样机
利用开发的可穿戴搬运助力机器人试验样机进行了搬运助力实验,如图9所示。

Figure 9. Test prototype of wearable handling assistance robot
图9. 可穿戴搬运助力机器人试验样机
为了测试腰部多轴单自由度机构的助力效果,分别以重量分别为1 kg、5 kg、10 kg的水桶进行了加载实验。依次对弯腰θ角30˚、45˚弯曲角度条件下气缸所需的拉力进行测量,如图10所示。气缸所需助力效果如表1所示,其中转矩一、力一为θ角30˚时的测量数据,转矩二、力二为θ角45˚时的测量数据。

Figure 10. Power-assisted experiment of multi-axis single-degree-of-freedom
图10. 多轴单自由度助力实验

Table 1. Back cylinder power experiment
表1. 背部气缸助力实验
从表中可以看出,随物料重量的增加所需的拉力逐渐增加,同一重量的重物随着弯曲角度的增加,所需的拉力逐渐变大。实验得到的转矩数据与理论计算基本相符。
6. 结论与展望
本文设计了一种多轴单自由度机构,可随人体弯腰与直立与作业者紧密贴合,借助气缸拉力为穿戴者提供腰部助力,减轻腰部负担。对其进行受力分析后得到:有助力情况下,背部肌肉收缩力为无助力的49%;腰骶关节受力为无助力的54%,助力效果良好。之后的多轴单自由度机构搬运助力实验,验证了腰部助力机构的可行性。
在后续工作中,我们拟继续研究腰部助力的有效方案,并努力减轻机器人整机重量、提高穿戴舒适性及穿上脱下的便利性,争取早日实现搬运助力机器人的实用化。
NOTES
*通讯作者。