摘要: 基于车车通信列控系统是以车为主体的下一代列控系统。与采用集中控制方式的基于车地通信列控系统相比,基于车车通信列控系统是一套分散自律的列控系统。列车以ATS发送的运营计划为基础,通过与其他列车通信,获取其运行方向、位置等信息,进行移动授权的计算,保证行车安全。受限于系统通信能力,列车不可能与其他所有列车建立通信,因此车车通信模型是基于车车通信列控系统的核心技术之一。针对车车通信模型,本文提出了基于区域通信的车车通信模型。基于区域通信的车车通信模型是以列车为中心,将线路进行区域划分,分为直接通信区域、间接通信区域和无通信区域。处于直接通信区域的列车间将建立物理通信连接,处于间接通信区域的列车通过其直接通信区域的列车进行速度、位置、运行方向等信息的传递,从而保证在列车能够获取到同一路径方向上至少两列车的信息的前提下降低系统的通信负载。通过实验室系统样机测试证明,本文提出的基于区域连接的车车通信模型能够在降低系统通信负载的情况下实现车车通信问题,为后续工程应用提供理论和技术支撑,具有实际的应用价值。
Abstract:
Vehicle-Communication-Based Train Control System (VBTC) is one of the next generation train control systems based on the vehicle-to-vehicle communication. Unlike the traditional centralized train control systems which are based on the bidirectional communications between the on-board controller and wayside controller, the VBTC system is a decentralized train control system where train operation is self-disciplined by the on-board controllers. Based on the operation plan scheduled by the ATS, the on-board controller of a VBTC system obtains and calculates essential information, such as the train moving direction, speed and position data, and movement authority (MA), protecting the safety movements of train. Limited by the communication capacity of the radio communication system, communication with all the other on-board controllers in the network at the same time is unachievable. Therefore, we propose a regional communication based on Vehicle-to-Vehicle Communication model which divides all the trains into direct communication regional, indirect communication regional and no communication regional, according to their relative positions on the network. According to the regional defined, each train on the network can distinguish its direct communication trains, indirect communication trains, and no communication trains. By the proposed model so that it can communicate directly with its direct communication trains, communicate with its indirect communication trains via its direct communication trains. As a result, a train can at least acquire information of two trains in one direction on the network without overloading the radio communication system. The verification results indicate that the model can resolve the challenging of the vehicle-to-vehicle communication in the VBTC system, supporting the development of the VBTC system theoretically and practically.
1. 引言
列控系统是现代轨道交通保证安全、高效运营的核心系统,目前在城市轨道交通中得到大量应用的是基于车地无线通信的列控系统(CBTC, Communication Based on Train Control) [1]。CBTC系统也在应用中积累了大量的运用经验,安全性、可靠性等方面都已经达到了较高的水平。但是回看CBTC系统的技术特点、应用现状等,此系统还是有一些有待完善的地方:系统接口多,轨旁设备多、数据中转多、导致系统架构复杂、运维成本高、运营灵活度受限。针对上述问题,基于车车通信的列控系统(VBTC, Vehicle to vehicle communication Based on Train Control)孕育而生。基于车车通信的列控系统是以车载设备(VOBC)为主体的列控系统。车载设备(VOBC, Vehicle On Board Controller)收到列车自动监督子系统(ATS, Automatic Train Supervision)发送的运营信息,根据电子地图进行列车运行路径规划。同时,车载设备与其他列车建立通信获取其他列车的位置,通过OCS (Object Controller Service)控制道岔,完成移动授权计算,并根据移动授权控制列车运行 [2] [3] [4] [5] [6]。
车车通信模型是VBTC系统的关键技术之一,受限于通信网络,车载设备不可能与所有列车均建立通信连接,因此本文针对该问题,提出了VOBC通信区域的概念,将整个线路分为直接通信区域、间接通信区域和无通信区域。通过对通信区域的划分,能够使用较小的通信占用,完成必要的车车通信。
2. VBTC系统组成结构
基于车车通信的列控系统由列车自动监控子系统、列控车载子系统VOBC、地面控制单元服务器OCS、数据通信子系统(DCS, Digital Communication System)、应答器(Balise)、计轴、信号机设备组成,典型的VBTC系统架构如图1所示。
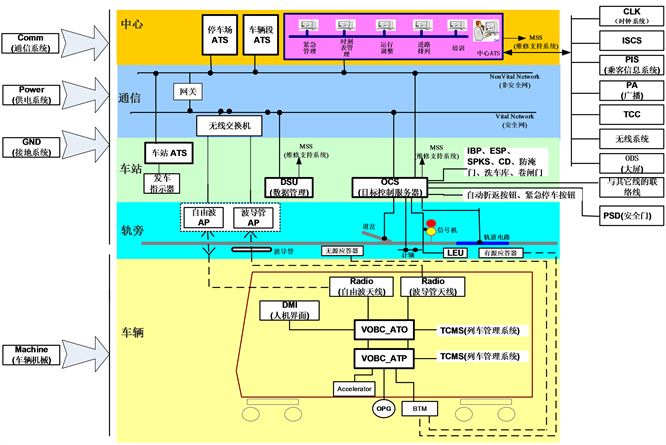
Figure 1. The structure of VBTC system
图1. VBTC系统组成结构
1) ATS
ATS作为地铁运营行车指挥中心,起辅助调度人员编制运营计划并监督计划执行的作用。其业务内容包括3个主要方面:计划、监控和调整,此外包括如统计分析、车辆段维修等方面的辅助功能。
2) VOBC子系统
VOBC子系统是基于车车通信的列控系统的核心子系统,它在传统的CBTC系统的基础上增加了车车通信管理、运行路径搜索功能、移动授权计算功能、道岔控制功能,从而实现以车为主体的列车自动防护功能和自动驾驶功能。
3) OCS子系统
OCS子系统根据VOBC子系统发送的道岔控制命令、安全门控制命令进行道岔和安全门控制。OCS子系统还应具备采集站台紧急停车按钮(ESB)、站台自动折返按钮以及安全门的状态并发送给VOBC子系统,以实现紧急停车功能、自动无人折返功能以及车门和站台门联动功能。
4) 计轴
在IL等级下用于列车的占用检查。
5) 信号机
在IL等级下用于进路状态表示,提示司机控制列车。
3. 车车通信模型
3.1. VOBC通信区域定义
将整个线路作为一个线路网,形成一个无向图,VOBC通信区域则是以自身节点为中心,所有与之存在直接流向关系的列车以及与这些列车存在直接流向关系的列车。因此,VOBC通信区域分为:直接通信区域、间接通信区域和无通信区域,如图2所示。
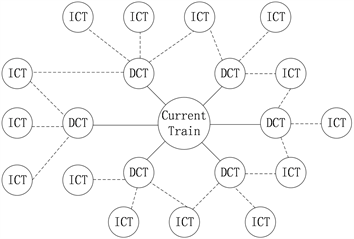
Figure 2. Schematic diagram of VOBC communication area
图2. VOBC通信区域示意图
1) 直接通信区域
在无向图中与本列车有直接连接关系的列车形成的区域。在这个区域内的列车需要建立直接的通信连接,定义这些列车为直接通信列车(DCT, Direct Communication Train)。
2) 间接通信区域
本列车的直接通信列车(DCT)存在直接连接关系的列车形成的区域。在这个区域内的列车定义为间接通信列车(ICT, Indirect Communication Train)。间接通信列车的信息由直接通信列车传输给本列车。
3) 无通信区域
线路上除直接通信区域和间接通信区域的区域为无通信区域,定义在这些区域的列车为无通信列车(NCT, No Communication Train)。
上述三种列车均是无线通信正常的列车,因此,定义无线通信故障或非通信列车为通信故障列车(CFT, Communication Failure Train)。
以下面站场图为例,说明直接通信区域、间接通信区域和无通信区域。
根据图3生成的无向图关系如图4所示。
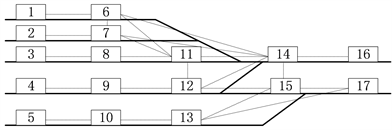
Figure 4. The undirected graph based on network diagram of railway of Figure 3
图4. 基于图3生成的无向图
以图3和图4中的列车14为例:
列车14的DCT列车包括:列车6、列车7、列车11、列车12、列车15、列车16;
列车14的ICT列车包括:列车1、列车2、列车8、列车9。
以图3和图4中的列车11为例:
列车11的DCT车包括:列车6、列车7、列车8、列车12、列车14、列车15;
列车11的ICT列车包括:列车1、列车2、列车3、列车9、列车16。
通过以上两个举例,
判断本列车的DCT列车的原则如下:
以本列车为中心点,对无向图进行广度优先遍历,本列车所有相邻节点(第一层节点)上的列车为本列车的DCT列车。
判断本列车的ICT列车的原则如下:
本列车所有DCT列车的DCT列车为本列车的ICT列车。即以本列车为中心点,对无向图进行广度优先遍历,本列车所有第二层节点上的列车。
当某列车既是DCT列车又是ICT列车时,应按照DCT列车进行处理,即与之建立直接通信连接。
3.2. DCT列车搜索算法
DCT算法由初始化模块、本地搜索模块、常规搜索模块、道岔搜索模块、循环搜索模块和主函数构成。
1) 初始化模块
初始化模块实现的功能有:加载电子地图、刷新范围内所有列车位置、初始化本车所在位置。
2) 本地搜索模块
本地搜索模块实现的功能有:计算本车所在轨道区段所有其他列车与本车的相对位置,根据计算所得相对位置将距离本车最近的上行和下行方向列车记为DCT列车,并根据本车上行或下行方向上是否存在DCT列车确定列车的初始搜索方向。搜索原则采用直股优先原则,即优先搜索道岔直股(尖轨—直轨)。
3) 常规搜索模块
常规搜索模块以起始轨道区段为起点,根据确定的搜索方向依次对轨道区段进行搜索,确定轨道区段上是否存在其他列车。若存在其他列车,则搜索终止,将此列车ID加入DCT列车列表,本次搜索终止;若搜索到终点后仍未找到其他列车,本次搜索终止。搜索终止后,输出搜索中经过的所有轨道区段ID、道岔ID及DCT列车列表。
4) 道岔搜索模块
根据常规搜索模块提供的本次搜索所经过的所有轨道区段ID、道岔ID,计算下一次搜索的起始轨道区段ID列表(即道岔弯轨)。
5) 循环搜索模块
依次调用常规搜索模块和道岔搜索模块,直至遍历所有可达的轨道区段,输出多次搜索中找到的所有DCT列车ID。(图5)
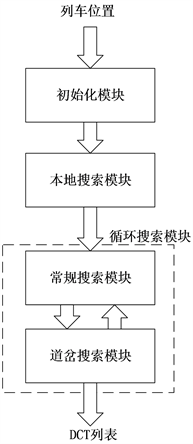
Figure 5. The flow chat of the DCT searching algorithm
图5. DCT列车搜索流程图
4. 模型仿真及验证
为了验证车车通信模型的正确性,本文首先以图3站场图为例进行模型仿真验证。对17辆列车进行搜索,搜索结果如表1所示。

Table 1. The DCT search result
表1. 17辆列车的DCT列车搜索结果
为了验证车车通信模型的可用性,本文以重庆轨道交通3号线为仿真线路,并搭建半实物仿真环境,进行模型和功能性验证。测试内容主要包括:ATS功能、OCS功能、VOBC功能、系统追踪间隔功能、系统网络通信功能。
半实物仿真环境包括:1套ATS、1套OCS、3套VOBC、1套DSU、1套轨旁设备仿真、3套车载仿真,半实物仿真环境架构如图6所示。
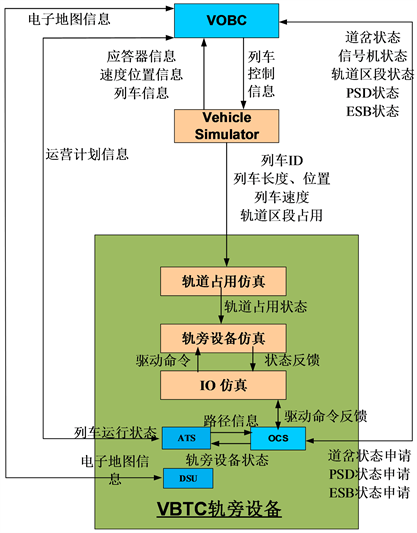
Figure 6. The HIL testing platform
图6. 半实物仿真测试平台架构图
通过仿真测试验证,本文设计的车车通信模型能够满足系统实时性和功能的需求,车载设备的运行周期不超过200 ms。基于车车通信的列控系统能够达到正线追踪60秒的正线追踪间隔,网络负荷不超过50%,实现了基于车地通信的CBTC系统的所有功能。
5. 结论
车车通信模型是基于车车通信的列控系统的关键技术之一。本文针对车车通信模型问题,提出了基于区域通信的车车通信模型。本文设计的车车通信模型采用无向图将列车的通信区域划分进行划分,直观的反应列车之间的关系。通过模型验证和系统仿真测试,本文提出的车车通信模型能够减少车车通信连接数量,减小系统通信负荷,满足基于车车通信的列控系统的通信需求,实现列车自动防护和自动驾驶功能,具有理论和实际工程应用价值。
基金项目
北京市科技计划面向轨道交通网络化运营的全自动运行系统关键技术和装备研究与应用示范(Z181100003918006)。