1. 引言
科技日新月异,无人机产业受到了世界各国的普遍重视,得到了广泛深入的研究和飞速发展。不同场景下对无人机的使用要求不同,具备自主的飞行空域的环境感知、碰撞威胁估计、规避路径规划与机动控制能力,即无人机的感知与避障功能 [1]。感知与避障技术是未来无人机空域集成应用的重要安全保障,同时也对无人机自主化、智能化技术提出了更高的要求。
2. 系统总体设计方案
无人机在复杂环境下能够以自主的方式完成各种动的多场景的无人机感知规划系统,其由一个由感知规划层和执行层组成的分层体系结构,感知与智能规划层一起进行自主操作,生成运动指令,本论文介绍感知规划层的设计方式。在该无人机系统上共建有4个核心系统即:三维地图建模系统、避障系统、感知系统、飞控系统。
本方案应满足以下要求:
1) 能满足无人机感知与自动规划的精度要求;
2) 对原无人机的重量和结构改造尽可能少;
3) 在原有飞控系统上加以改进,增强无人机的稳定性及作业时的安全性;
4) 在无人机改造上尽可能降低成本。
3. 分系统设计方案
3.1. 三维地图建模系统
三维地图建模是多场景无人机感知和自动规划系统的必备条件,三维地图建模系统能使无人机感知到地形上的变化,为无人机避障提供前提条件,让无人机能自主完成规划。利用无人机上搭载的传感设备对周围环境进行感知获取相应的环境信息,构建初始三维地图和无人机所处位置的三维地图。在持续获取的环境信息的无人机,三维地图的更新模块一直判断飞行过程的周围环境变化情况并获取环境变化信息,进行三维地图的更新。
数据获取模块利用无人机上搭载的传感设备对周围环境进行感知、扫描,获取相应的环境信息,对相关的设备获取的相关数据进行修正。然后图像处理模块处理并特征提取,确定扫描环境的特征点。
三维地图生成模块基于获取的环境信息构建初始三维地图,对获取的三维地图图像特征进行有效的提取、存储、编辑和记忆,构建合理、准确表征的空间三维环境,定位模块利用提取的环境特征点、导航定位数据、惯性测量数据、运动传感数据计算无人机当前位置以及姿态。
轨迹标注模块将无人机的位置以及姿态数据标注在构建的三维地图中,判断执行任务中周围环境是否与构建的三维地图模型以及空间三维环境一致。若不一致,则继续获取环境信息,进行三维地图的更新。
3.2. 传感器健康系统
传感器是无人机控制的传感机构,采集位置、速度、姿态等数据信息的准确性对无人机的避障效果有重大影响。无人机作为其中一个姿态由惯性测量控制单元IMU获得,位置及速度可由GPS获得,但由于在某一方向上单单依靠IMU或GPS所提供的数据不满足精度的要求,因此普遍采取无人机的数据融合技术,在传感器系统中引入了气压计和三轴数字陀螺仪,满足整个无人机感知系统的需求 [2]。
基于温差原理,自然界一切工作温度明显高于没有绝对零度的物体都在不停地向外发出红外线,可感知热信息。针对红外传感器捕获的特性,设计了一定区域里的红外传感器对无人机飞行轨迹的数据采集 [3],基于一定区域里地面的红外传感器在红外线照射探测区域里可以测得无人机的反射或者散射回传感器而得到飞行参数,同时红外传感器向地面站传输数据,通过与之前的无人机传输的飞行数据与该红外线测得数据汇合,可以得到主体和客体的不同来源数据进行实时分析从而得到无人机主体的传感器工作状态是否健康可靠。
首先通过在一定区域内部署一定个数的红外传感器,记为i个。以该区域中心位置建立x轴、y轴和z轴的坐标空间,将i个红外传感器位置在坐标上表示,无人机进入离开单个红外传感器范围的时间分别为ti1,ti2。
为了减少红外传感器的相互发射红外线和接收红外线的相互干扰,需要在适当的区域安装一定角度的的红外线传感器。在规定单位时间j里,传感器向地面站传输相关飞行数据。
完成传感器实时分析的传输数据函数和各传感器交互信息有效性函数的建立,待无人机飞过某一区域里的传感器范围,传感器上传数据至地面站,进而与无人机自身传感器反馈的数据对比分析实现传感器的工作状态判断。
采用红外线探测具有以下独特优势:红外线是无源被动目标探测方法,红外传感器的红外线不易发生散射,穿透能力和反应灵敏度较强,扫描速度快还具有抗干扰能力强、易于产生、对环境影响小、不会干扰临近的无线电设备。
3.3. 避障系统
当前,在无人机避障过程中,有许多技术手段其中无人机集群群间避障的手段主要有双目视觉、激光雷达、多架无人机GPS位置通信共享等,或者是这由这些方法组合而成的复合方法 [4]。这些方法都有各自的优势和略势,激光雷达虽然有测距准确、测量距离远的特点,但是需要特殊的硬件支持,并且成本高。视觉图像处理则需要额外的控制器且算法复杂。这些方法都有各自的优劣,激光雷达虽然有测距准确、测量距离远的特点,但是需要特殊的硬件支持,并且成本较高,视觉图像处理则需要额外的控制器且算法复杂。
在开源Pixhawk四旋翼无人机平台上,无人机的测距模块进行自主规划避障系统的总体架构如图1所示,通过雷达进行障碍物检测,激光雷达精度高、灵敏度好可以得到目标障碍物到无人机之间的间隔,同时它的体积和重量都很轻,因此适合搭载在无人机上。将雷达检测与视觉避障相结合,能够实现对障碍物等并不会产生实际阻碍效果的障碍物的检测,减少避障次数,实现准确避障的同时减少能耗,同时实现无人机飞行时间的延长。
当多个无人机执行任务时,每个无人机都配备有不同的传感器。无人机共享信息,相互配合,各司其职,整个编队具有很强的鲁棒自愈能力和故障冗余。即使失去了一些个体,也不会对整体造成致命的影响。
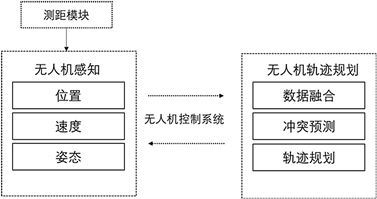
Figure 1. Block diagram of autonomous planning obstacle avoidance system
图1. 自主规划避障系统框图
3.4. 飞控系统
所谓无人机的飞控,就是无人机的飞行控制系统,飞控系统应该包括作业范围选择模块、测量精度选择模块、时漂和温漂计算模块、中央控制模块、无人机信号采集模块、位置确定模块、姿态获取模块、健康状态判断模块、姿态解算模块、飞控信号测试模块、电源模块、数据存储模块、显示模块,如图2所示。
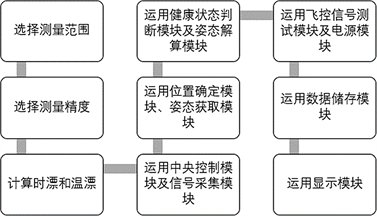
Figure 2. Implementation of flight control system method
图2. 飞控系统方法实施图
无人机的飞控系统,通过至少两组姿态传感器和一组无人机通过该区域的红外传感器所采集航姿数据,中央控制模块处理导航数据后,至少将其解算成两组无人机姿态值,通过与区域红外传感器获得的无人机对象环境空调数据进行比较,选择最可靠的无人机姿态值来计算伺服控制量,从而保证系统在选择每个无人机姿态值时做出最佳选择,保证无人机的正常飞行,从而增强无人机飞行控制系统的稳定性,提高无人机在飞行过程中的安全性。
4. 结束语
无人机飞行是复杂的过程,作为一个无人机运用于多场景下可自动避障并且规划路径的系统,在各种复杂的应用环境下可以取得一定的效果,可以为无人机的安全性和稳定性提供了保障,本文对无人机系统的研究,获得了以下结论:
1) 无人机的三维地图建模是无人机感知和自动规划系统的必备条件。
2) 无人机工作健康系统是将红外传感器传输的数据至地面站并与红外线测得数据汇合从而得到无人机主体的传感器工作状态是否健康可靠。
3) 通过雷达进行障碍物检测,将雷达检测与视觉避障相结合,不产生阻碍效果,可减少避障次数,有利于无人机的经济性。
4) 不同传感器对同一无人机所收集的航姿数据,在中央控制模块处理后,选择可信度最高的无人机姿态值用来计算伺服控制量,增强了无人机飞控系统稳定性,提高了无人机在飞行时的安全性。
但在某些特殊使用场景环境下该系统的使用存在局限性,在无人机飞行的天气原因如电磁感应复杂的场景干扰传感器,系统的智能程度需要更高、更具有经济性,应用场景才能更广泛。