1. 引言
自1990年Pecora和Caroll [1] 引入驱动–响应同步概念提出混沌同步原理以来,因其在保密通信领域的应用价值,诸多学者对神经网络的同步性问题进行了研究,提出了多种同步方法 [2] [3] [4] [5] [6]。同时同步的概念也得到了拓宽,如完全同步 [7]、延迟同步 [8]、反同步 [9] [10] 等。
四元数是复数在某种意义上的扩展,在处理风速预报、彩色图像、阵列信号等实值神经网络和复值神经网络无法处理的问题上具有显著优势。此外由于四元数乘法不可交换的特性,四元数神经网络动力学特性比实值神经网络和复值神经网络更复杂。然而,文献 [2] - [10] 主要集中于实值神经网络之间的同步问题,因此,一个自然的问题是:四元数神经网络反同步是否有相应的结果?
本文就上述四元数神经网络问题进行研究,主要考虑一类具有时滞的四元数神经网络的指数反同步问题,利用李亚普洛夫理论和驱动–响应同步方法探讨,给出了四元数值时滞神经网络实现指数反同步的一个判定准则和反同步控制器设计方法,通过数值仿真验证了所提出方法的有效性。
2. 预备知识
2.1. 四元数代数
一个四元数
可被表示如下形式:
其中
,
是虚数单位,且满足
为四元数
的实部,记为
;
称为四元数
的虚部,记为
。由此我们可知四元数乘法不可交换。定义另外一个四元数
则四元数
的和与乘积分别定义为
用
表示
的共轭转置,并且
的模表示为
令
,则
的模可表示为
,
的范数表示为
注:本文用
、
、
分别表示
维实值、复值、四元数值矩阵,
即
是半正定(正定)矩阵。
2.2. 系统表示及基本引理
本文考虑如下一类四元数值时滞神经网络模型:
(1)
其中
是神经元的状态变量,对角矩阵
表示神经元的自反馈系数矩阵且
,矩阵
分别表示神经元之间的与时滞无关、与时滞有关的权值矩阵,
和
:
分别表示没有时滞和有时滞的激活函数,
表示系统外部输入,
是信号传输时滞且
。
系统(1)的初始值是
,
在
上有界且连续。
以系统(1)为驱动系统,设计相应的响应系统如下所示:
(2)
其中
表示相应系统神经元状态变量,
是实现驱动系统(1)和响应系统(2)指数反同步的控制器。
系统(2)的初始值是
,
在
上有界且连续。
本文给出下列假设:
假设1 为方便计算,设激活函数
,
对
可以分解成如下形式:
其中
。
假设2 对
,激活函数
满足Lipschitz条件,即存在常数
,
使得:
(3)
成立,其中
,
。
引理1 [6] 假设存在正数
、
满足
,
是非负函数且满足
其中
,则
成立,其中
是方程
的唯一解。
引理2 [11] 假设
、
、
均是任意维数的实矩阵,且
,则对
有
成立。
定义系统反同步误差信号为
,因此有
(4)
其中
是误差系统(4)的初始值。
类比文献 [12] 中指数反同步的定义,引入下面定义:
定义1 如果存在常数
,
使得误差满足下列不等式:
则称驱动系统(1)和响应系统(2)是全局指数反同步的。
利用四元数运算法则,式(4)所示误差系统可以分解为如下等价的实值系统:
(5)
3. 主要结果
定理1 在假设1和假设2被满足的基础上,设计控制器的形式为:
(6)
其中
且
,
,
。
如果存在矩阵
,
和控制增益
使得下式成立:
(7)
其中
。
则在控制器(6)下驱动系统(1)和响应系统(2)是全局指数反同步的。
证明:构造Lyapunov函数形式如下:
(8)
对(8)进行求导,其时间导数如下:
(9)
由假设2可知,一定存在对角矩阵
使得下式成立:
(10)
其中
,
,
。
由引理2可得下列不等式
(11)
成立,其中
。
由式(9)~(11)有:
(12)
由引理1很容易得到:
即
即
其中
是方程
的解。因此驱动系统(1)和响应系统(2)在控制器(6)下实现了全局指数反同步。
4. 仿真示例
例1 考虑如下时滞具有常时滞的四元数值神经网络:
(13)
为了实现反同步,设计如下响应系统:
(14)
其中
对于
,
,式(6)所示控制器参数取为
,很容易验证其满足定理1条件,因此可以得出系统(13)和系统(14)在控制器下是指数反同步的结论。
随机选取10组数据。图1为系统运行时的误差变化曲线,显然驱动响应系统实现了反同步。
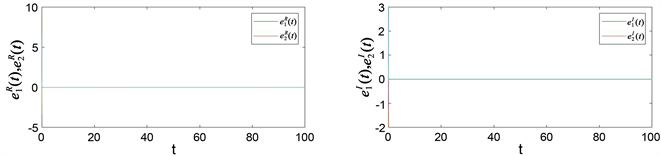
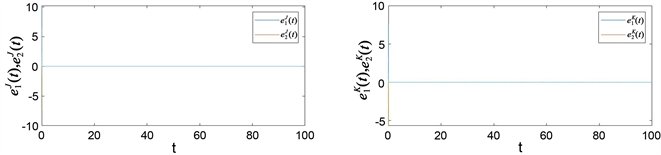
Figure 1. The anti-synchronization error curves between
图1.
和
之间的反同步误差变化曲线
令驱动系统(13)和响应系统(14)的初始条件分别为
,
,
,
,系统(13)-(14)的状态变量的实部和虚部随时间的变化如图2所示。
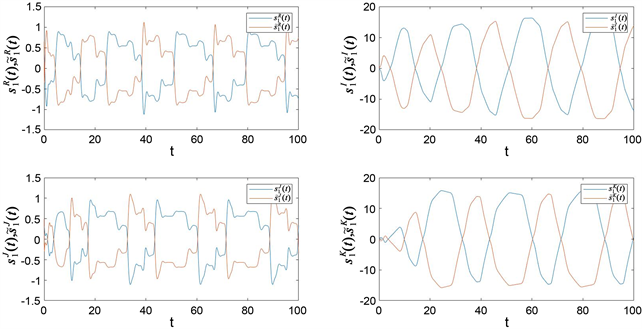
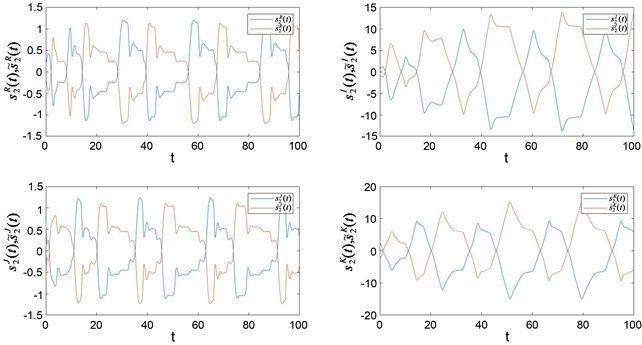
Figure 2. Variation curves of the real and imaginary parts of a variable
图2. 变量的实部和虚部变化曲线
5. 结束语
利用Hamilton法则将具有常时滞的四元数值神经网络系统转化为等价的实值神经网络系统,设计一个简单易于实现的控制器,给出了驱动系统和响应系统的实现全局指数反同步的判别准则。最后通过数值仿真,验证了提出的设计方案的有效性,丰富了四元数值时滞神经网络动力学行为分析的相关研究。