1. 引言
近年来,随着汽车保有量的快速增加,交通事故发生率随之增加。重大交通事故还造成了严重的人员伤亡和财产损失。紧急处理事故,通畅交通成为日常性重要工作。随着互联网、通讯、自动化控制技术的发展,智能交通为驾驶员保驾护航,机动车搭载了越来越多的智能化设备,具备科技辅助功能,例如定速巡航、车车互联(Vehicle-to-Vehicle,简称V2V)通讯技术等,安装V2V设备的车辆可以实时的相互传送对方车辆行驶的基本信息(车速,车间距等),驾驶员可以借助V2V通讯设备实时地接收到前车的交通运行状态,从而针对性的调整其驾驶行为,有利于避免碰撞的发生,保障交通安全。
在Newell等 [1] 提出跟车模型后,Bando等 [2] 提出的优化速度(optimal velocity,简称OV模型)具有更广泛应用。此后,有许多学者提出了一系列扩展OV模型 [3] [4]。Jiang等 [5] 在GF模型的基础上,进行了改进,考虑速度差对交通流的影响,提出了全速度差(full velocity difference,简称FVD)模型。在FVD模型的基础上许多学者考虑多前车的速度,车间距等信息提出一系列扩展模型 [6] [7] [8] [9]。有的学者考虑真实驾驶环境中后视效应、车头间距随记忆变化的影响和道路安全驾驶的情况提出了改进模型 [10] [11] [12]。有的学者通过考虑驾驶员平稳驾驶的期望,提出改进的多期望跟驰模型 [13] [14]。伴随现代化信息采集手段不断改善,有的学者考虑在网络物理系统(CPS)环境、V2V环境下的改进模型 [15] [16] [17]。Li等 [18] 针对由低敏感度和高敏感度车辆组成的交通流,建立了一个异质跟驰模型。Ge等 [19] 考虑驾驶员对平稳驾驶的要求和历史车速数据的自稳控制,提出了改进的跟驰模型。孙棣华等 [20] 考虑驾驶员借助ITS系统,提出了考虑不同多前车速度差比重下的跟驰模型(multiple car-following,简称MCF),与FVD模型相比,通过理论分析与数值仿真表明对交通流有进一步的致稳作用。
随着智能交通系统(ITS)和车联网技术的应用,在V2V环境下,安装V2V设备的车辆可以实时的共享周围车辆的行驶信息,特别是前车的速度,加速度等基本信息,从而可以在一定程度上提前预判交通流的变化,并随之改变车辆的状态。对于高速行驶的车辆而言,V2V设备可以有效帮助驾驶员提前预警前方行驶异常的车辆,对车辆防碰撞,减少车祸的发生有着重要作用。
在本文中,将着眼于在智能环境下车辆跟驰模型的提出、改进和解决紧急交通安全的研究。基于MCF模型,考虑驾驶员通过V2V设备而提前
时刻获得多辆前车的速度信息对跟驰车辆的影响,提出MCF的扩展模型(Multiple car-following model considering time, MCF-CT)。通过线性稳定性方法,分析MCF-CT模型的稳定性,通过非线性理论分析研究多前车速度差模型,导出密度波方程——Burgers方程、mKdv方程,通过数值模拟验证模型的合理性,并分析防碰撞的情况。
2. 模型的提出
1995年,Bando等 [2] 提出了如下优化速度模型(optimal velocity model, OV):
(1)
其中
表示驾驶员在驾驶车辆过程中的敏感系数,
为第
辆车在
时刻的瞬时速度,
可以计算出车头间距为
时行驶允许的最优速度。
2001年,Jiang等 [5] 提出了FVD模型,其方程如下:
(2)
其中,
,
表示驾驶员敏感系数,
表示对速度差的反应系数。
2009年,孙棣华等 [20] 考虑多车跟车模型(MCF),给出如下方程:
(3)
其中,
,且
其中
是第
辆车车头间距所占比重的系数值,
为第
辆车与第
辆车间速度差所占比重的系数值,
表示相对速度反应系数。
2015年,Li等 [9] 考虑驾驶员能够记住前
秒时的车速与当前时刻的车速,提出了当前速度与
秒前速度的速度差模型:
(4)
但是,该模型却忽略了
时间段内速度的连续变化过程。
2017年,陈春燕等 [21] 考虑利用积分中值定理,将
内的速度连续化,给出了新的跟驰模型:
(5)
其中
表示驾驶员对于速度的连续记忆,刻画了车辆连续运动。
为提高交通流的稳定性,抑制交通流拥堵,并特别地考虑紧急情况下的交通安全问题。本文考虑在MCF模型(3)的基础上引入V2V设备的影响,此时驾驶员能通过V2V设备提前
获取前方多车辆的车辆运行状态,在一定程度上预判交通流的变化,并做出相应的反应。于是,提出如下模型:
(6)
其中
,
,优化速度函数选取为文献 [21] 的形式:
(7)
其中,
是安全距离。权重参数
如下:
其中
是第
辆车车头间距所占比重的系数,
为第
辆车与第
辆车间速度差所占比重的系数,
和
体现驾驶员对前方不同车辆的关注情况。
为车道中车辆总数,
为车道中前导车数目。
为后面分析方便,将模型(6)简写为MCF-CT模型。
3. 线性稳定性分析
本节采用线性稳定性方法分析MCF-CT模型(6)的稳定性。
假定车辆在交通流系统处于完全的稳定状态时,以标准的车头间距
在道路上行驶,且所有车辆的
行驶速度均为
,则在
时刻第
辆车的位置
为:
(8)
若在
时刻给交通系统施加一个小扰动
,则此在扰动下
时刻第
辆车的位置
如下:
(9)
将(9)式代入(6)式,整理后得到关于扰动
的如下方程:
(10)
其中
将
代入方程(10),整理得到如下方程:
(11)
其中
。将
的展开式代入(11),并保留至
的第二项,得
稳定临界曲线条件是
,即有:
(12)
当
时,交通流系统将处于稳定状态;而当
时,交通流的运行将不稳定,任何一个小扰动将可能造成交通流的局
部或全局拥堵。
当
时,模型(6)退化为OVM模型,其临界曲线
。当
时,由
可得,
,即相同车间距下,
的临界曲线值更小,故稳定区域得到了扩大。事实上,当
不断增大时,
不断减小,因
恒为正数,故临界曲线相对于
时的曲线是下移的。
为进一步说明稳定区域精准扩大的情况,定义稳定区域面积所占的比率为
。当
时,
,当
时,
,当
时,
。可见,MCF-CT模型(6)提高了稳定区域。下图为
时的临界曲线图像。

Figure 1. The stability curve of MCF-CT model with m = 1 and m = 2
图1. m = 1,m = 2时的MCF-CT模型的稳定曲线
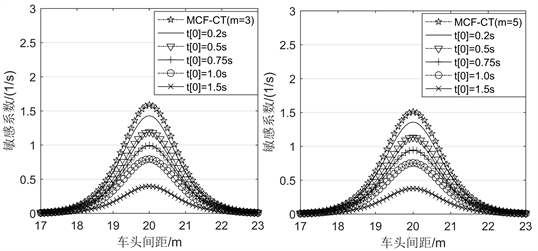
Figure 2. The stability curve of MCF-CT model with m = 3 and m = 5
图2. m = 3,m = 5时的MCF-CT模型的稳定曲线
图1和图2表示在考虑了V2V的影响和多前车的车间距时,不同
对临界曲线有明显的改变,在临界曲线上方的区域,交通流的运行非常稳定,不会出现交通拥堵的现象;而在中性稳定线的下方,交通流的运行相对不稳定,出现密度波,从而产生交通拥堵的现象。特别地,当
逐渐变大时,稳定区域逐渐扩大,交通流的运行向着稳定的方向发展。从理论上讲,随着
(前导车)的增加,交通流变得更加稳定,但是随着
(前导车)的增加,也需要收集和处理更多的前导车的信息,这就对新技术提出了更高的要求,当确定
后,从图4中,可以看到当考虑前方两辆车时能有效提高模型的稳定区域,当
时,相应的曲线几乎重合,因此在该参数下,认为考虑前方三辆车
的MCF-CT模型综合效果最好(见图3)。
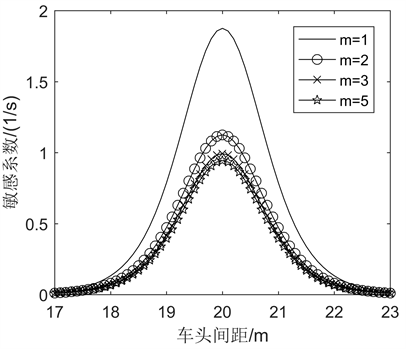
Figure 3. The stability curve of MCF-CT model with t0 = 0.75 s
图3. 当
秒时,MCF-CT模型的稳定曲线
综合图1~3,在车辆使用V2V技术后,驾驶员可以提前预判前方车辆的运行轨迹,因而可以将驾驶的重心更多的放在对车辆的操控,并采取有效的方式保持交通稳定,特别是还可稳定处理紧急避险的安全问题。
4. 非线性分析和孤立波
本节将导出临界点
附近的交通传播规律的非线性方程,并给出孤立波。
依据文献 [17] 的区域划分方法,由前面第3节中导出的稳定性条件,在车头间距与敏感度系数的图中依据临界曲线,将交通流的状态分为稳定区域、不稳定区域。运用约化摄动法导出相对应的Burgers方程,mKdV方程,分析交通流在不同区域密度波的传播规律。
将方程改写为:
(13)
4.1. 导出Burgers方程(在稳定区域)
在临界点附近定义慢变量
和
如下:
(14)
其中
为待定参数,
设车头间距如下:
(15)
将(14)和(15)代入(13),通过泰勒展式至
量级,得到如下非线性偏微分方程:
(16)
其中,
,
,
,
,
令
,消去
的二次项后,将(15)式化简为:
(17)
由线性稳定性条件:
(18)
可知,在稳定区域内:
(19)
在这里,(16)是一个Burgers方程,它的一个解为:
(20)
其中,
表示沿着
轴的斜率,
表示激波波前的坐标。
是三角激波的传播速度。三角激波相对交通流中的车辆行进方向是向后传播,当平均车间距增加时,传播速度逐渐减小。当
时,模型(6)退化为OVM模型,此时
令
,易得:当
时,
有最大值为
。
同理,令
,有如下结论:
i) 当
时,令
,得
,但因为
恒成立。因为
,所以当取
时,
,这显然不符合实际。
ii) 当
时,即
,令
,得到
。当
时,
有最大值
,由权重参数
的性质可知,当
变大时,
变大且
,从而有
,容易证明,当
,
时,
恒成立,从而
在
时成立,于是
,这说明模型(6)相比较于OVM模型更容易演化为稳定的交通流。
4.2. 导出mKdv方程(在不稳定区域)
在临界点
(其中
为临界敏感度,
为临界车头间距)附近,定义两个慢变量
和
如下:
, (21)
其中
为待定参数,
设车头间距如下:
(22)
将(21)式和(22)式代入(13),利用泰勒展开式至
量级,得到如下非线性偏微分方程:
(23)
其中,
在临界点
附近,条件(12)成立,此时,取
,
,
。忽略
量级时,方程(23)简化为如下形式:
(24)
其中:
;
为了得到修正后的mKdV方程,做如下线性变换:
(25)
得到含有
校正项的方程如下:
(26)
其中,
(27)
在(26)中忽略校正项
,就是mKdV方程,它有扭结—反扭结波解为:
(28)
这里
是表示传播速度,为了得到
,
需要满足可解性条件 [11] 如下:
(29)
通过文献 [24],我们得到扭结—反扭结波的传播速度为:
(30)
于是,方程(26)的解为
(31)
因此,车头间距的扭结–反扭结密度波的解 [23] 为
(32)
从而,扭结–反扭结解的振幅
写为:
(33)
其中,
我们上式中的
代入,得到
(34)
此时,在临界点附近的扭结–反扭结解,可以表示交通流会发生交通阻塞和交通流稳定的临界情况,该过程通过mKdV方程描述,具体包括交通流稳定时的自由流相和交通阻塞时的阻塞相,由
和
分别给出了自由流相和阻塞相的车头间距。从(34)可知,当
和
增大时,振幅
越小。交通堵塞现象越弱。
5. 数值模拟
为进一步研究在V2V环境下MCF-CT模型的稳定性和防碰撞的效果,通过MATLAB 2016b编程对模型(6)进行数值模拟分析。模型的基本参数 [9] 设置如下:采样时间间隔取0.1秒;
,
,
,仿真步长为10,000,模型选取的优化速度为(8)式。在周期边界条件下 [22],以相同的车头间距均匀分布,
。
紧急情况下的防碰撞问题
驾驶员遇到紧急情况很常见,例如前车突然的减速、其他车辆的突然汇入,很容易引起交通流的突变,造成车辆安全事故。基于稳定性分析,在紧急情况下,考虑
的MCF-CT模型的防碰撞问题。主要考虑车辆在突发紧急情况时,制动行为导致车间距急速拉大或减小,影响到交通流的稳定性,由此判断是否会出现撞车行为。
考虑某辆前导车突然减速,使得车间距减少5米的情况。本次仿真中,正常情况下的车间距为8米,安全间距
为4米,由此,可以判断该情况对车流的影响是巨大的,很有可能发生撞车行为。
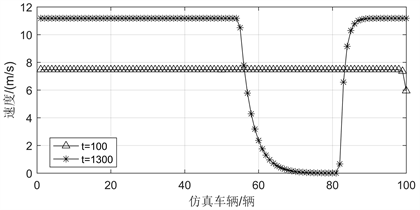
Figure 4. Velocity diagram of FVD model
图4. FVD模型下的速度图
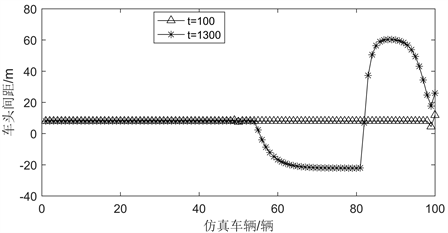
Figure 5. Vehicle waveform of FVD model
图5. FVD模型车辆波形图
从图4和图5表明,FVD模型的交通流处于很不稳定状态,特别是在图5中,密度波传播到第80辆左右时,车辆间距出现负值,出现了撞车行为。
下面考虑当
时的MCF-CT模型(6)的数值结果。

Figure 6. Velocity diagram of MCF-CT model (t = 1300)
图6. MCF-CT模型速度图(t = 1300)
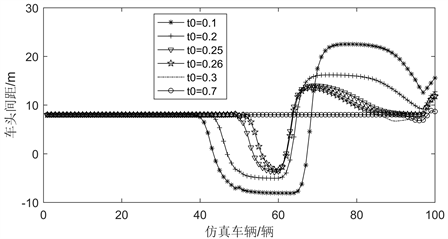
Figure 7. Vehicle waveform of MCF-CT model (t = 1300)
图7. MCF-CT模型车辆波形图(t = 1300)
从图6和图7可看出,随着
的增大,交通流逐渐趋于稳定,当
秒时,交通流稳定,这就表明,在本次模拟的特殊情况下,车辆达到避险的目的。从图7中也可以看出,当
秒时,交通流处于稳定状态,但相比于
秒,车速较低,说明
的取值过大反而会妨碍驾驶员的驾驶,使得道路通行能力下降。因为在本次数值模拟中,驾驶员的敏感系数设置较高,所以结合实际情况,认为,当
秒左右时,模型(6)对紧急防撞有积极作用。
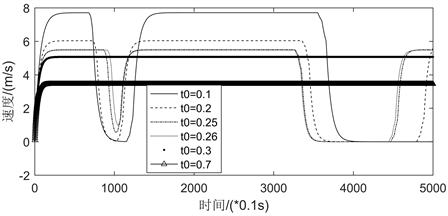
Figure 8. The 70th vehicle Velocity diagram of MCF-CT model
图8. MCF-CT模型的第70辆车速度图
图8为MCF-CT模型的第70辆车仿真步数到5000步时的速度图。从图中可以看出,
秒时,车速稳定行驶。结合图5至图8说明,当仿真步数相同时,MCF-CT模型使交通流的稳定性得到明显提升;从图8中可以看到,当
大于0.3秒时车辆的车间距都大于安全间距,这说明MCF-CT模型有效的防止了紧急情况下的撞车问题。这些结果综合表明,相比较于OVM模型和FVD模型而言,MCF-CT模型(6)在考虑多前车速度信息(
时综合效果最优)时密度波的幅值明显减少,这就意味着模型(6)更好地描述或解决了交通流的稳定性和车辆防碰撞问题。
6. 结论
在本文中,从OVM模型和FVD模型出发,借鉴MCF模型的建立思路,通过对V2V通讯技术的引入,考虑在多车跟车的情况下,可提前
时刻预测前方车辆速度,车间距等车辆运行状态,提前预判前方车辆运行轨迹,提出了MCF-CT模型(6)。通过线性稳定性分析得到了MCF-CT模型的线性稳定性条件,结果表明,MCF-CT模型的稳定区域相比较与OV模型的
增加至
,MCF-CT模型的稳定区域明显扩大。在非线性分析中,运用约化摄动方法分析了车流的密度波变化。在稳定区域和不稳定区域分别导出了Burgers方程、mKdV方程,用其描述交通流的密度波变化。进一步,通过数值模拟验证了理论分析的结果,以及MCF-CT模型在紧急情况下对防碰撞产生的积极作用。
NOTES
*第一作者。
#通讯作者。