1. 前言
随着城市化进程的不断加快以及城市人口密度的不断增加,地铁凭借其运量大、污染小、安全准时和舒适性高等优点,逐渐成为许多城市发展绿色交通的优选 [1]。然而,受城市规划和建筑地形的限值,地铁线路存在较多小半径曲线,常规转向架车辆在通过曲线时存在轮轨磨耗和轮轨作用力过大的问题,不仅降低了车辆运行安全性,而且增加了车辆以及线路的运维成本 [2]。因此,采用径向转向架来减小轮对冲角和轮轨横向力,继而提高车辆曲线通过性能和降低轮轨磨耗,是提高地铁车辆动力学性能和降低运维成本的最佳选择 [3]。
相关学者针对径向转向架开展了一系列研究工作并取得了不少成果。Scheffel等 [4] [5] 设计的自导向转向架采用对角交叉式相连的两个副构架将前后轴箱相连,确保轮对朝曲线径向相对自由转动,实际运用表明该自导向转向架可以明显减小轮缘磨耗。国内的南京铺镇车辆厂研制开发了减振器式自导向径向转向架,楚永萍 [6] 对该型径向转向架的总体结构和技术要求进行了详细的分析说明,并进行了转向架的参数优化。相比于自导向转向架,迫导向转向架在改善曲线通过性能方面更有优势,相关学者也开展了一系列的研究。邬平波等 [7] 设计了一种针对高速客车的迫导向转向架方案,对车辆的直线稳定性和曲线通过性能进行了分析,发现迫导向转向架不仅能改善曲线通过性能,而且还可以提高车辆的直线稳定性。刘玉卿和史炎 [8] 研究了重载三轴货车迫导向转向架的动力学性能,计算结果表明,相比于传统两轴转向架,迫导向转向架可以显著降低轮轨冲角和磨耗,同时轮轨垂向力也有所降低。随着车辆设备的不断升级和控制技术的不断完善,主动径向技术受到广泛关注并被逐渐应用于径向转向架设计中。韩国铁道技术研究院研究员Park等 [9] 设计了一种基于杠杆原理的主动径向转向架并对径向机构进行了运动学分析,该转向架可以显著降低车辆通过曲线时的横向蠕滑力。同济大学的田师峤等 [10] 设计了一种轮对定位与作动器一体化的直接作动式地铁车辆主动径向转向架,该转向架在保证车辆直线运行稳定性的同时有效地降低了作动器的输出力。
基于现有研究成果,本文以模型地铁车辆为研究对象,利用多体动力学仿真软件建立传统、自导向、迫导向以及主动径向转向架地铁车辆动力学模型,分析不同转向架车辆的曲线通过性能,对比其导向性能,以期为地铁车辆径向转向架的设计与应用提供参照。
2. 径向转向架导向原理
径向转向架是借助径向辅助机构使所有轮对都趋于径向位置,根据不同的径向原理可以划分为自导向转向架、迫导向转向架和主动径向转向架。下面,分别对这三种径向转向架的导向原理进行介绍说明。
2.1. 自导向转向架
自导向转向架本质上依然是依靠蠕滑力实现导向的,与常规转向架不同的是,其将一系悬挂分解为轮对间的弯曲刚度和剪切刚度,通过选取较低的弯曲刚度来放大蠕滑力的导向作用。此外,在轮对间加装径向机构将前后轮对的摇头运动进行了耦合,从而使轮对具有趋于径向的功能。图1给出了适用于地铁车辆的自导向机构示意图,其中导向臂铰接在构架侧梁上,导向臂两端通过轴箱拉杆与轴箱转臂连接,从而将前后轮对的纵向运动耦合起来。为了实现前后轮对同向和反向的纵向相对运动,在Z字形连杆基础上增设了导向臂扭杆。

Figure 1. Schematic diagram of the radial mechanism of a self-steering bogie
图1. 自导向转向架径向机构示意图
2.2. 迫导向转向架
相比于自导向转向架,迫导向转向架在导向臂上端增设了一个车体连杆,从而利用车体与构架之间的相对回转,借助导向机构迫使轮对朝曲线径向摇头,如图2所示。当车辆通过曲线时,转向架顺应曲线偏转而车体仍保持切线方向,两者间产生偏转角,车体通过车体连杆带动导向臂旋转,具体形式为:曲线外侧导向臂顺时针旋转使左右车轮撑开,曲线内侧导向臂逆时针旋转迫使左右车轮缩回,继而迫使前后轮对呈外八字形展开而趋于径向。
车辆通过曲线时,令车体和构架之间的相对转角为α,导向机构迫使轮对相对构架转动角度为β,设理论导向增益系数g为两者比值,则有:
(1)
(2)
(3)
式中:b为转向架轴距之半;L为车辆定距之半;R为曲线半径。
要使轮对尽可能地趋于径向位置,导向增益系数的选取至关重要。由式(3)可见,理论增益系数只与车辆定距和轴距有关,而与曲线半径和导向机构横向跨距无关。

Figure 2. Schematic diagram of the radial mechanism of a forced-steering bogie
图2. 迫导向转向架径向机构示意图
2.3. 主动径向转向架
与常规径向转向架不同,主动径向转向架是一种基于控制技术的径向转向架,通过安装在转向架上的作动机构实时驱动轮对,迫使轮对呈外八字形展开而趋于径向位置。根据主动导向结构形式的差异,主动径向转向架可以分为拉杆式和作动器直接作用式两类。本文采用直接作用式径向转向架,如图3所示。其主要结构是分别在轮对两侧纵向布置一个作动器,作动器一端连接轴箱另一端连接转向架。当车辆通过曲线时,曲线外侧作动器活塞杆伸出,内侧活塞杆缩回,迫使轮对趋于径向。

Figure 3. Schematic diagram of the active radial bogie
图3. 主动径向转向架示意图
本文从工程化应用角度出发,采用基于位移闭环的相对摇头角控制策略,作动器在曲线上实时控制位移为:
(4)
式中:a为作动器横向跨距之半;b为车辆轴距之半;R为曲线半径。
为实现径向转向架主动控制,需掌握车辆所处位置的实时曲线半径。本文利用布置在头车的二系回转角传感器采集到的数据感知线路曲率半径,计算公式为 [10]:
(5)
式中:ρ为一位转向架实时线路曲率;d为车辆定距;φA和φB分别为一位和二位转向架与车体的相对回转角;v为车辆运行速度。
3. 动力学模型建立
利用SIMPACK多体动力学仿真软件,分别建立传统、自导向、迫导向和主动径向地铁车辆动力学模型。在建立动力学模型时,将车体、转向架、轮对和转臂视为不考虑弹性变形的刚体 [11],车轮型面采用LM踏面,钢轨型面采用CN60轨面,建模过程中充分考虑悬挂系统和轮轨接触的非线性特性。
自导向转向架在传统转向架的基础上添加自导向机构,采用2.1节中介绍的Z字形连杆形式的自导向径向机构,通过杆系法 [12] 对径向机构进行建模,即忽略径向机构的质量并将其集中在轴箱拉杆上,以等效导向刚度的方式模拟。迫导向转向架则在此基础上增设一个车体连杆,其导向增益系数选取为理论导向增益g,仿真时不考虑导向机构的间隙。自导向转向架和迫导向转向架车辆动力学模型分别如图4(a)和图4(b)所示。
 (a) 自导向转向架
(a) 自导向转向架  (b) 迫导向转向架
(b) 迫导向转向架
Figure 4. Conventional radial bogies
图4. 常规径向转向架
主动径向转向架在传统转向架基础上增添了主动径向机构,径向机构由前后轮对左右两侧共四个作动器组成,作动器通过两端节点分别连接轴箱与构架并提供一系纵向定位刚度。为更接近实际系统,在SIMPACK中作动器以体的形式建立,并在其两端各建立一个力元,控制器的实时输入位移则通过移动Marker点的形式实现。基于二系回转角的相对摇头角控制策略,建立主动径向转向架联合仿真模型,如图5所示。
当车辆进入曲线时,采用基于车体与构架二系回转角传感器的曲线识别技术实时获取作动信号,作动信号经滤波后传给控制器模块,并根据相应公式判断出曲线半径以及作动器所需作动位移,控制器进而控制作动器产生相应位移并迫使轮对趋于径向。即SIMULINK从SIMPACK中实时获取车辆运行速度以及前后转向架的二系回转角,识别线路实时半径并计算出作动器目标控制位移,然后经SIMULINK处理后实时将位移传输至SIMPACK车辆模型中,从而形成一个完整的闭环。

Figure 5. Schematic diagram of co-simulation for relative yaw angle control based on secondary rotation angle
图5. 基于二系回转角的相对摇头角控制联合仿真示意图
4. 导向性能对比分析
基于上面建立的四种转向架车辆动力学模型,开展转向架导向性能对比分析,重点从车辆通过曲线时的轮对冲角、轮对横移量以及轮对磨耗指数来衡量转向架导向性能。这里分别选取曲线半径为500 m、300 m和100 m的三种工况进行对比分析,考虑到实际线路都存在轨道激励,模型中施加美国五级谱激励。需要注意的是,由于轨道激励的存在,控制信号的获取需要进行低通滤波处理,由此不可避免的带来一个微小的时滞。采用类似摆式列车的方法将车辆前部测量信号根据轮轴间的距离进行适当延迟以补偿时滞,但头车前转向架不能得到补偿。因此,这里重点对比前转向架导向轮的冲角、横移量和磨耗指数。
不同转向架车辆通过500 m曲线半径时的轮对冲角、轮对横移量及轮对磨耗指数对比结果如图6与表1所示。可以看到,相比于传统转向架,常规径向转向架和主动径向转向架都可以实现一定的径向效果,提高车辆的曲线通过性能;相比之下,主动径向转向架的径向效果最佳,迫导向转向架次之,自导向转向架径向效果最差;在主动径向控制下,轮对最大冲角由−5.26 mrad降至−1.76 mrad,轮对最大横移量由−13.23 mm降至−9.97 mm,轮对最大磨耗指数由451.52 N降至126.42 N。
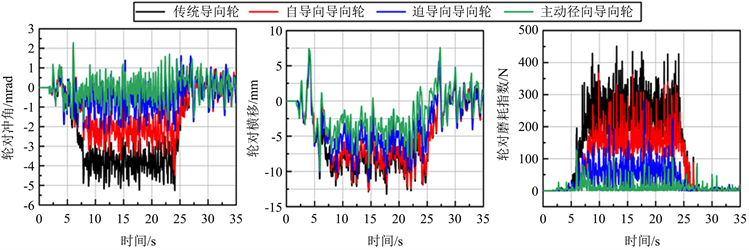
Figure 6. Comparison of steering performance for different bogies in the curve with 500 m radius
图6. R500 m曲线半径下不同转向架导向性能对比

Table 1. The maximum of each index for the guide wheel in the curve with 500 m radius
表1. R500 m曲线半径下导向轮各项指标最大值
图7和表2给出了不同转向架车辆通过300 m曲线半径时的轮对冲角、轮对横移量及轮对磨耗指数对比结果。可以看到,曲线半径减小后,不同转向架导向轮的各项指标都有所上升;从轮对冲角和轮对磨耗指数的角度而言,常规径向转向架仍具有改善效果,但在轮对横移量上已无法进一步优化;在主动径向控制下,各项指标均能得到明显改善,轮对冲角最大值由8.78 mrad降至−2.37 mrad,轮对横移量最大值由−14.51 mm降至−11.39 mm,轮对磨耗指数最大值由569.35 N降至239.26 N。
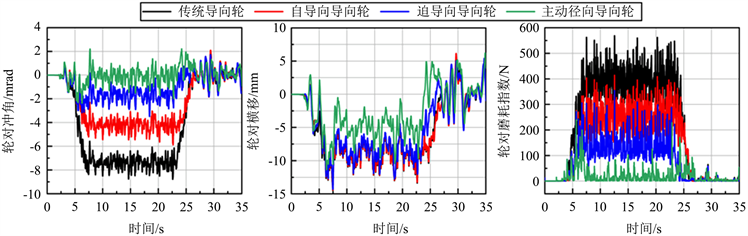
Figure 7. Comparison of steering performance for different bogies in the curve with 300 m radius
图7. R300 m曲线半径下不同转向架导向性能对比
Table 2. The maximum of each index for the guide wheel in the curve with 300 m radius
表2. R300 m曲线半径下导向轮各项指标最大值
进一步减小曲线半径,图8和表3给出了不同转向架车辆通过100 m曲线半径时的轮对冲角、轮对横移量和轮对磨耗指数。可以看到,在100 m的小半径曲线下,相比于传统转向架,自导向转向架的径向改善效果已无法体现,迫导向转向架改善轮对冲角和轮对磨耗指数的效果也有限,主动径向转向架优化效果仍十分显著;此外,由于滤波时滞的存在,相比于大半径曲线,主动径向转向架导向轮在小半径曲线的缓和曲线上磨耗存在着较为明显的波峰现象。

Figure 8. Comparison of steering performance for different bogies in the curve with 100 m radius
图8. R100 m曲线半径下不同转向架导向性能对比
Table 3. The maximum of each index for the guide wheel in the curve with 100 m radius
表3. R100 m曲线半径下导向轮各项指标最大值
5. 结论
本文介绍了常规径向转向架和主动径向转向架的导向原理,分别建立了传统转向架和三种径向转向架的地铁车辆动力学仿真模型,对比了不同转向架的径向效果,得到如下结论:
1) 相比于传统转向架,自导向和迫导向转向架都可以改善车辆在曲线上的轮对冲角和轮轨磨耗,但当曲线半径较小时,这两种常规径向转向架的导向效果一般。
2) 主动径向转向架可以实时调整轮对通过曲线时的姿态,显著提高车辆曲线通过性能,且能兼顾不同曲线半径,使轮对冲角、轮对横移量和轮轨磨耗得到大幅改善;此外,相比于大半径曲线,主动径向转向架导向轮在小半径曲线的缓和曲线上磨耗存在着较为明显的波峰现象。