1. 引言
在汽车产业规模持续增长的同时,汽车照明朝着更加安全、环保、节能、智能化、人性化的方向发展,汽车智能化是当今全球汽车界重要的发展趋势之一 [1] [2]。汽车的照明最开始是在1906年采用的乙炔气灯,随着时间的推移汽车照明经历了白炽灯、卤素灯、双钨丝灯、疝气灯以及最近几年相对火热的LED灯和LD灯的演变。LD灯与传统照明相比有辐射能流更高、更加节能等优点。
随着人们生活水平的提高,人们从对汽车车身到对前照灯、尾灯的设计都开始追求更加美观、智能、安全的设计。汽车尾灯从最开始只是满足法规的照明功能,到现在与汽车前照灯同步发展,越来越智能化,目前已经实现了投影、迎宾、流水效果等功能 [3]。目前投影式汽车灯主要有两种方式。一种是通过挡板实现投影,另一种是通过DMD芯片实现投影。第一种挡板式投影如图1所示,主要由抛物式反射面、光源、挡板及光学透镜四部分组成 [4]。
该尾灯投影示意图具有结构简单的优点,这减少了在实际整灯组装过程中由于人为的影响造成出现的光源位置偏移,进而影响整灯的出光效果。但是该设计还存在着照明亮度不足的问题,单颗LED的功率有限,并且LED光源为伯朗式光源,光强随着出射角度以及距离的增加而减小,这会导致出光效果不够明显,不能使后车司机看清,特别是在车速快车距又相对较远的高速路上,以及各种能见度不高的路况。
第二种DMD芯片式投影原理如图2所示,DLP投影传统光学结构主要由光源,合光(分光)器件,匀光器件及中继系统,DMD芯片以及投影物镜等几大部分组成 [5]。

Figure 2. DMD chip projection principle
图2. DMD芯片式投影原理
这种DMD芯片式投影可以获得与DMD芯片大小一致的且均匀度高的光斑,并且可以通过DMD芯片角度的不断调整而改变出光的方向,从而满足近光、远光调整的目的。但是该装置一般用RGB三色来合成白光,适用于汽车的前照灯,不符合国家法规对后车灯的规定。
2. 设计方案
为了解决以上问题,本文提出以激光作为光源设计一款基于激光雷达的自适应尾灯的设计,主要研究并分析了光源排列的最佳间距,并建立了一个虚拟模型,用来探究前车与后车之间尾灯自动开启的最佳阈值。最后探究并计算了该装置与传统车尾灯的能耗比例。该激光照明系统主要由控制模块和光学模块两部分组成。通过激光雷达发射出光信号,当光信号到达后车时,光信号返回并反馈给控制电路,通过控制电路控制光源的功率以及发射角,达到给予后车警示的目的。整体尾灯系统结构如图3所示。
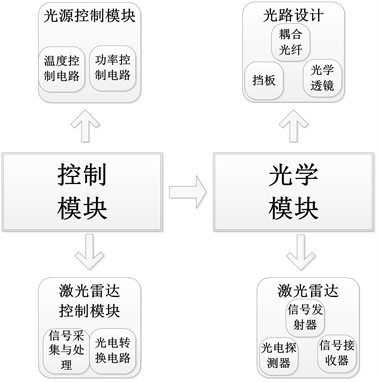
Figure 3. Integral tail lamp system structure
图3. 整体尾灯系统结构
本文所设计的基于激光雷达的汽车尾灯系统的工作流程图如图4所示。首先前车发出激光雷达发射光信号,当光信号到达后方形式车辆时,经过反射,信号回馈给激光雷达 [6]。通过激光雷达,控制电路接收到返回的光信号并开始进行处理,从而对LD光源进行调控。

Figure 4. Work flow chart of automobile tail lamp system based on lidar
图4. 基于激光雷达的汽车尾灯系统的工作流程图
目前,市面上普遍选用的灯为LED灯,但是LED与LD相比它的能耗更高,并且辐射能流比LD更低。通常汽车尾灯只能采用红色、白色和黄色。由于红光本身在人们的认知中就是“警戒色”,选用波长为650 nm的贴片式红色LD作为激光源。激光雷达使用905 nm波长的激光作为探测信号,可进行水平方向360˚探测,旋转速度可达5 Hz,其探测距离达到300 m的范围,具有厘米量级的探测精度 [7] [8] [9]。
本文的光路设计如图5所示,光源拟采用多个红光激光二极管以矩阵的形式排列并通过合束光纤进行耦合,考虑到耦合效率,光纤数值孔径不宜过小。激光通过光纤耦合后,光束直径变为5 mm。经过准直镜扩束,通过对光束进行耦合、整形达到使得光斑大小整合到与挡板大小一致,这样就能最大限度的利用光能,达到节能的目的。最后再通过透镜投影到地面。
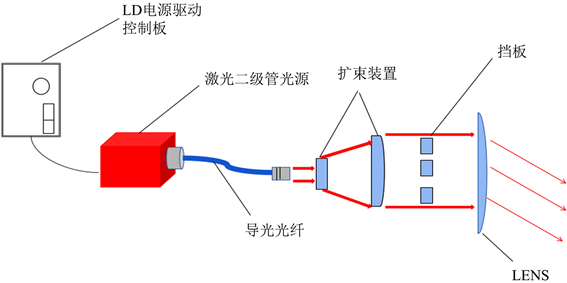
Figure 5. Light path design of lighting system
图5. 照明系统的光路设计
通过zemax设计一个5倍的光束扩束系统 [10] [11] [12]。整个扩束系统长250 mm,两个透镜之间间距为230 mm。两个透镜的使用材料均为n-bk7,前透镜的曲率半径为−20,后透镜的曲率半径为200和−200,仿真结果如图6所示。
本设计采用的光型是相对简的感叹号与直线结合的形状,如图7所示。挡板的长宽根据光束直径进行设计,由上文光束通过扩束装置后光束直径变为250 mm,为了避免光源的浪费,我们将挡板的长宽与光束直径保持一致,以达到光能使用率最大化的目的。
在道路照明设计中,对于照度均匀度指标,越接近1越好。照度均匀度越高则光线分布越均匀,视觉感受越舒服;反之,照度均匀度越小越增加视觉疲劳。然而照度均匀度越大,则费用成本越高。因此,应保证路面照明有合理的照度均匀度 [13]。
为了获得更好的照明平坦度以及达到更加节能的目的,我们对光源排列的间距进行了变量分析。根据王加文等人得出的结论,矩形排布的光源阵列模块优化后的间距与距离目标面之间存在的线性关系如图8所示 [13]。考虑到汽车尾灯空间有限,我们取照明模块距挡板的距离为15 cm,从图中可以看到当照明模块与照明目标距离为15 cm时,最佳的灯珠间距在10~15 mm之间,由于光源间距与光源接收面的福射强度成反比,所以本文在保证福射强度大小的基础上,为了更加符合汽车尾部的空间体积和更加高效的利用光能,本文决定在灯珠间距为10~15 mm之间通过计算来取得光源的最佳间距,并将灯珠以2 × 2的方式进行矩阵排列。

Figure 8. Relationship between optimal spacing and LED array distance from target [13]
图8. 最佳间距与LED阵列距目标的关系 [13]
光源模块的辐射面积公式为:
(1)
式中:S为光源的辐射面积,d为灯珠与灯珠间的间隔,h为灯板距离照射面的高度。
取灯珠间间距d分别为:7.5 mm,10 mm,12.5 mm,15 mm。考虑到汽车尾灯空间大小,取h为150 mm。代入公式(1)进行计算得到下列数据如表1所示:

Table 1. Radiation area calculation result data
表1. 辐射面积计算结果数据
我们通过王洪等人提出的最佳间距公式进行认证 [14],方形阵列的照度分布公式(2):
(2)
而对于2 × 2的特殊矩阵,可以看作环形矩阵通过公式(3)获得最大平坦度间隔:
(3)
式中:r0为最大平坦度间隔,m值取决于芯片相对于灯珠封装透镜曲面的距离,在这里为了方便计算我们将m取为1,即视作光源为理想的伯朗体光源。将m = 1,h = 150 mm,代入公式(3)得,r0 = 10 mm。当灯珠间距为10 mm时,辐射面积为19,656 mm2,更加符合投影图案的面积。
为了得到该装置的均匀度,我们必须先对其光照均匀度进行计算。将被照平面离散成M' × N'个大小相等的方形区域,并且将每个小区域视为一个点,那么被照射区域的光照度均值光照均匀度计算公式(4)为:
(4)
光照度的均匀度通常采用最小光照度与平均光照度的比值来表示,比值越大表示光照的均匀性越好。光照度的均匀度可表示为:
(5)
式中:Emin为光照平面上最小光照度。经过计算我们将数据代入公式(2) (4) (5)得到下列数据如表2所示:
Table 2. Lighting uniformity calculation result data
表2. 照明均匀度计算结果数据
经过计算,当灯珠间距为10 m时,均匀度最高,综上所述,当灯珠为10 mm时,可以更好的符合该装置的整体设计,因此选定灯珠间距为10 mm。
驾驶员在直线行驶时,由于“隧道视野”现象,注视点远离车辆。通过观察物体的大小和周围环境的变化来判断驾驶员速度的方法会有很大的误差 [15]。如果驾驶员在跟车操作,当前方车辆的速度与车辆的速度相差不大时,驾驶员对车辆速度的判断能力较低,正确操作汽车的概率在紧急情况下避免危险的情况也较少 [16] [17]。随着车速的增加,驾驶员对距离的判断也有较大的偏差。当视力正常的驾驶员预测静止物体的距离时,距离约为56 m。车速为20 km/h时动静视觉距离误差与静态视觉距离误差之比为11.4%,车速为30 km/h。动静态视觉识别距离误差与静态视觉识别距离误差之比为33.2%,40 km/h速度时动静态视觉识别距离误差与静态视觉识别距离误差之比为39.8%。根据《中华人民共和国道路交通安全法实施条例》第八十条规定,当行驶时速超过100 km/h的机动车,需要保持100米以上的安全车距,而当车速低于100 km/h时,与前方车辆的间距不得小于50米 [18] [19]。
针对高速公路中高速行驶和大车与小车之间的视野差,本文构建了一个高速公路上两车驾驶过程中的模型,假设两车驾驶速度为100 km/h。当后车与前车距离相距100 m时前车的激光尾灯照明系统启动,并向地面投影出相应的图像达到警示的目的,后车司机的视角如图所示。考虑到车流较多处于比较拥堵的道路状态时,当前车与后车距离相距10 m及以内时,光学模块停止工作。激光尾灯工作示意图如图9所示。

Figure 9. Working diagram of laser tail lamp
图9. 激光尾灯工作示意图
3. 工作原理
该系统工作时,首先由激光雷达发射光信号到后车,当光信号照射到目标物时,由激光雷达的光信号接收器接收反射光信号,通过光电转换电路把反射光信号转变为电信号。光源驱动电路收到特定的电信号时则激发光源,由半导体激光二极管阵列发出的光先通过导光光纤进行合束,再通过扩束装置将光束的光斑整合至挡板大小,最后通过透镜将挡板的影像透射到地面上。
图10为扩束装置光路图,通过下列公式,可以求出两个透镜的焦距。当满足条件
时,光束聚焦于后焦面上的光斑尺寸为:
(6)
式中,
为入射在副镜表面上的光斑半径。光束的准直倍率为:
(7)
但是由于目前激光作为尾灯灯源的情况较少,所以对于激光还没有出台明文规定,因此我们这里借鉴于2007年发布的有关LED车尾灯的《汽车及挂车倒车灯配光性能》法案,进行安全性分析 [20] [21]。参考国家对倒车灯光强和光通量的标准,我们通过下列公式对本文的设计的尾灯的光通量和光强进行了计算,计算结果表明符合国家标准。
光通量和辐射通量之间的转化通过CIE标准观察者的视见函数来表示,单位是流明(lm)。
(8)
发光强度描述了光的立体角的分布情况,用坎德拉(cd)来表示发光强度的大小。
(9)
本设计采用LD灯珠的额定功率为60 mw,由于灯珠在工作过程中势必会生热,必须将其带来的热量损失也计算在内,热功率的计算公式:
(10)
式中:E为灯珠的热功率,n为相应颜色灯珠的数量,Er为灯珠的电功率,
为灯珠的电光转换效率。
结合灯珠本身的电功率,总的能量计算公式:
(11)
我们与传统的LED灯泡做了对比,取额定功率为1 w两种灯珠进行对比,将数据代入公司(10) (11)得出该装置与传统LED车尾灯相比节能约70%左右。除此之外,该尾灯结构简单且结构中的光纤通过外壳封装具有很好的抗震性和柔韧性,光源LD的工作寿命一般在20,000 h以上,远超过LED的工作寿命。该尾灯通过在控制电路中加入工作距离的设定,无需人为操控开启该尾灯,而是通过激光雷达对两车间距的判定决定是否开启尾灯,通过这一设计达到了智能化的目的。
4. 总结
本文采用扩束装置与挡板结合的汽车尾灯结构,该尾灯通过激光雷达与电路结合的形式使得尾灯可以智能开关,该尾灯通过激光雷达对车距阈值的判定具有主动安全性,可以显著提醒后车司机保持车距。经过本文的研究发现,光源的排列方式应为矩阵2 × 2的形式排列,并且灯珠间隔应为10 mm。经过整体估算,该装置比传统的LED尾灯节能约70%左右。该照明系统解决了以往LED能耗高、穿透性不强、发光功率不够的问题,增加了驾驶者的安全性和体现了这套系统节能减排的价值。随着如今汽车的不断更新迭代,相信该套激光照明系统必将有重大的应用前景和价值。
基金项目
海南省自然科学基金(2019RC190, 2019RC192, 120MS031),海南省高等学校科学研究项目(Hnky2020ZD-12, Hnky2020-24),海南省高等学校教学改革项目(Hnjg2021ZD-22),海南省科技项目(ZDYF2020217, ZDYF2020020, ZDYF2020036),国家自然科学基金项目(62064004, 61964007, 61864002),海南省重大科技计划项目(ZDKJ2019005),中国工程科技发展战略项目(19-HN-XZ-07),大学生创新训练项目和大学生创新创业开放基金(榕树基金)资助。
NOTES
*通讯作者。