1. 引言
在生产生活中,有时需要用起重机吊起大铁球来拆除旧建筑物,可以用起重机的吊臂前后摇动铁球,使铁球来回撞击建筑物,最后将建筑物拆除(如图1)。在图1中我们通过建立直角坐标系来描述该球的运动轨迹,用
表示t时刻A在X轴中的位置,
表示t时刻索的长度,
表示t时刻索AP与y轴的夹角。进行力的分解,得到相应的运动方程,详见文献 [1]。
(1)
经典的受迫摆方程
(2)
其中m > 0表示摆的质量,l > 0表示摆的长度,
为受迫系数,g是重力常数。与经典的摆方程相比,系统(1)中
的系数依赖于时间t。本文将利用约化理论研究这种摆的摄动问题。
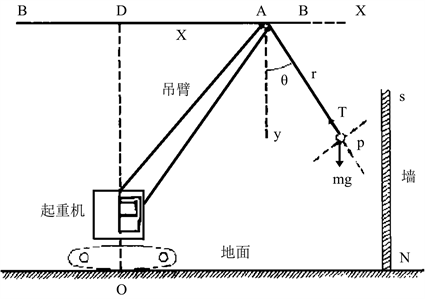
Figure 1. Working diagram of pendulum in engineering
图1. 工程中的摆工作图
在微分方程的研究中,若线性方程能变换成常系数的方程,则我们称这种变换为李雅普诺夫变换。具体定义如下:
定义1.1 考虑方程
(3)
是实数域上的
矩阵。如果存在一个非奇异的
矩阵函数
满足下列条件:
1)
和
在实数域R上连续;
2)
和
在实数域R上有界,即存在数M > 0,使得
3) 通过变换
,方程(3)可变成常系数方程
这时我们称方程(3)是可约化的,
称为李雅普诺夫矩阵,变换
称为李雅普诺夫变换。
由弗洛凯(Floquet)定理可知,如果
是周期函数,那么(3)是可约化的。
对于摄动问题,许多人近年来针对不同的系统做了大量的工作,详见文献 [2] - [7] 等。借助于KAM迭代法的思想研究系统的约化问题是动力系统的一个重要的研究方向。在前人工作的基础之上,本文主要研究上述摆方程的摄动问题。
2. 摆方程摄动问题的可约化性
首先,我们把方程(1)变成下面的形式:
令
,则有
(4)
其中
当方程(1)是摄动系统时的可约化性问题,即
,S是常数。这时
定理2.1 我们考虑下面的参数系统
(5)
其中
,
是一有界函数。则存在一个变换
经过此变换,系统(5)变成
(6)
证明:定理的证明过程将用到KAM迭代方法。
1) 第一步
给定变换
,其中
是下述方程的解
(7)
原系统经过变换后得
故
根据(7),可得
下面我们来求解(7)
因此有
对于此方程组,可以先求解第三个方程,再求解第一个和第四个方程,得
最后求解第二个方程,有
2) 第n步
对于变换
系统(5)变成
其中
是下列方程的解,
此方程的解法同第一步的解法类似。
由此可得
对于此方程组,可以先求解第三个方程,得
接下来求解第一个方程,得
再求解第四个方程,得
最后求解第二个方程,得
3) 迭代
经过若干步之后,我们可以得到一个变换序列:
作变换
经过变换,原方程变成
故
收敛,即
我们记
对于充分小的
,当
时,有
故经过变换
,系统(5)变成
定理证毕。
本定理用数学中的理论和方法研究了这种摆方程的可约化性,其中迭代的思想广泛应用于解决数学和物理问题中。在处理摄动问题时,可以借助于现有的理论和KAM迭代的思想把系统变换成简单的形式。
致谢
作者感谢编辑和审稿人对稿件的认真阅读,并提供宝贵的建议,这些建议将极大地提高论文的质量。
基金项目
国家自然科学基金(12171420),枣庄学院博士基金(1020704)。
NOTES
*通讯作者。