1. 引言
对于抛物面天线,根据天线波束宽度计算可知,天线口径越大、接收信号的频率越高,天线的波束越窄,对于窄波束天线而言,目标在主波束内驻留的时间较短,操作手要在较短的时间内对目标是否满足转“自跟踪”的条件进行判断,转“自跟踪”的条件为:① 时间与理论时间基本吻合;② 接收机处于锁定状态;③ 误差电压在收敛范围内;④ 信号电平与估算电平接近。在满足转“自跟踪”的条件后,转“自跟踪”状态。在手动捕获目标过程中,操作员需要观察相对时、角度变化趋势、误差电压变化趋势、接收信号电平变化趋势、实时角度与程引角度吻合情况、实时角度与数引角度吻合情况等要素,同时需要判断目标进入主瓣以及防止副瓣跟踪 [1]、天线飞车等可能出现的异常情况,从而成功捕获目标并稳定跟踪。由于窄波束天线的波束较窄,人工捕获时对操作手的观察、反应、应急能力要求较高,操作手面临着较重的心理负担,稍有不慎就会导致目标捕获失败。
2. 人工捕获过程分析
2.1. 人工捕获过程
当前操作手捕获目标时一般采用等待点捕获或随动捕获两种工作方式完成目标捕获。
(1) 等待点捕获
等待点捕获一般应用于跟踪初时段落捕获。事前将天线置于某等待点,观察信号接收电平、误差电压变化、数引与程引一致性,在等待点相对时间附近(一般在5 s以内)上述信息较好且误差电压的变化处于收敛状态,则在合适时机切换自跟踪完成目标捕获。若等待点捕获失败,则切换为随动捕获完成目标捕获。
(2) 随动捕获
随动捕获包括数引捕获工作方式和程引捕获工作方式两种情况,在数引质量良好时,采用数引捕获工作方式,在数引质量差或无数引时采用程引捕获工作方式。随动捕获在跟踪全程均可使用。
在跟踪初始段落时,将天线置于某等待点(一般设置为俯仰角高于0˚的某点),在等待点相对时间内,切换为数引或程引工作方式,在天线随动过程中观察信号接收电平、误差电压变化,当接收信号锁定、信号接收电平较稳定、误差电压较稳定时,在合适时机切换自跟踪完成目标捕获。
在跟踪过程中丢失目标时,在天线记忆跟踪结束后,切换为数引工作方式或程引工作方式,在天线随动过程中观察信号接收电平、误差电压变化,当接收信号锁定、信号接收电平较稳定、误差电压较稳定时,在合适时机切换自跟踪完成目标捕获。
2.2. 捕获过程逻辑抽象
在人工捕获时无论是采用等待点捕获还是采用随动捕获,操作手都要完成主瓣识别、目标收敛情况判断、跟踪方式切换、稳定跟踪判定等判断或操作。在自动捕获模型的设计中,根据人工捕获的过程进行逻辑抽象,建立模型,由计算机软件自动实现。
3. 自动捕获模型设计
3.1. 模型假设
在模型设计中,需要引用一些数据信息,对于这些信息,由于模型本身无法对数据进行判断,需要做出一些合理性假设。
(1) 关于数引数据的假设
假设:在跟踪过程中,若数引信息有效,则判定数引可用的标准是数引数据连续且无频繁跳点。
在实际跟踪过程中,由于设备端无法判定数引信息的正确性,故在数引有效情况下,仅能依据数引数据是否连续且有无频繁跳点判定数引信息是否可用。
(2) 在跟踪过程中,若数引信息有效,则优先采用数引工作方式为辅助捕获手段
假设:数引信息是中心计算机融合全系统测控设备测量数据解算出目标的实时位置、速度信息 [2],对于单套设备来说无法判定数引信息解算正确性,特别是当数引数据和程引数据差别较大时,故在数引有效情况下,优先采用数引工作方式 [3] 为辅助捕获手段,只有在无数引信息或数引信息不可用时才使用程引工作方式为辅助捕获手段。
(3) 关于目标相对天线位置的假设
假设:在天线随动过程中,按照目标相对天线位置可以分为目标在主波束内、目标在主波束外、目标穿越主波束三种情况,且三种情况不会同时存在。
天线随动分为程引工作方式下天线随动和数引工作方式下天线随动。
若目标飞行与理论弹道完全一致时,天线实时跟踪目标角度信息与程引角度和数引角度均无差值;当目标飞行与理论弹道有较小偏差时,天线实时跟踪目标角度与程引角度和数引角度的偏差小于跟踪主波束;随着目标飞行与理论弹道偏差逐步增大,天线实时跟踪目标角度信息与程引角度相差逐步增大,天线实时跟踪目标角度信息与数引角度信息相差可能会增大,故天线随动过程中,按照目标相对天线位置可分为假设中三种情况。
(4) 小结
通过以上分析,可将设备自捕模型简化为针对本节(3)中三种不同情况下的捕获跟踪逻辑,参考实际经验,目标在主波束内和目标在主波束外两种情况的出现概率远大于目标穿越主波束情况,故本模型先针对目标在主波束内和目标在主波束外两种情况设计自捕逻辑,再针对目标穿越主波束的情况进行局部优化。
3.2. 模型设计
3.2.1. 目标在主波束内情况下的捕获逻辑设计
在设备天线随动过程中,若目标在主波束内,则随时可切换为自跟踪状态完成目标捕获,故目标在主波束内的捕获逻辑重点是主瓣识别 [4]。
这种情况下的捕获逻辑包括准入逻辑、数据积累逻辑、捕获结果判定逻辑和退出逻辑。
(1) 准入逻辑
当跟踪接收机锁定时,连续积累1 s (20帧)测量数据,若过程中出现1帧以上失锁,则重新积累,若连续1 s测量数据均锁定,则判定初始条件满足要求,可以进入自动捕获流程。
(2) 数据积累逻辑
在进入自捕流程后,针对连续2 s测量数据同时判断以下条件,用于判断目标是否在主瓣内:
① 采用最小二乘法计算方位误差电压ΔUA的随机误差和俯仰误差电压ΔUE的随机误差序列,拟合数据20个,拟合阶数3阶,随机误差序列中至多4个随机误差超过方位误差电压和俯仰误差电压的门限值GA、GE;
② 方位、俯仰误差电压平方和的均方根可表示为天线电轴偏离目标映射在空间位置 [5],利用方位误差电压ΔUA和俯仰误差电压ΔUE计算目标偏离天线的空间误差电压值序列,最近连续20个目标偏离天线空间误差电压值序列中,至多2个超过门限G。
若同时满足上述条件,可以进入捕获结果判定逻辑,否则依据下述判据进行判断:
① 若连续2 s测量数据过程中出现5帧以上失锁,则退出数据积累逻辑,重新进入准入逻辑,并保持当前天线随动状态;
② 若连续2 s测量数据计算结果不满足上述条件,则以新数据替代旧数据(FIFO)滑动计算结果,直至满足要求后进入捕获结果判定逻辑。
(3) 捕获结果判定逻辑
为了最大限度地避免系统处于副瓣跟踪 [6] 和误跟踪,要对跟踪进行容错维护。
当软件进入捕获结果判定逻辑后,软件采用角误差电压驱动天线捕获目标 [7],即试闭自跟踪状态,并保持试闭自跟踪状态1 s,在此期间采集跟踪的各个状态用于判断是否为主瓣跟踪且跟踪稳定。
① 计算此过程中天线方位角速度、俯仰角速度、方位误差电压绝对值、俯仰误差电压绝对值,方位误差电压变化率、俯仰误差电压变化率等;
② 当天线方位最大角速度绝对值、俯仰最大角速度绝对值同时大于10˚/s,则判定天线飞车,退出捕获结果判定逻辑,重新进入准入逻辑,并回退天线工作状态为试闭自跟踪前天线随动状态;
③ 若试闭自跟踪1 s内天线最大方位角速度绝对值、最大俯仰角速度绝对值不同时大于10˚/s,且方位误差电压、俯仰误差电压绝对值均小于1 V,或方位误差电压、俯仰误差电压趋于0 V变化,则认为捕获目标成功,转入主瓣识别流程;
④ 由于在副瓣跟踪时,由于系统差零深的斜率变化,如图1所示,系统环路的增益将发生变化,跟踪时误差电压比主瓣跟踪时的特性要差,因此若误差电压特性不满足要求且AGC信号的迅速跌落则认为跟踪至副瓣,否则判定捕获目标成功,转入自跟踪状态,退出自捕流程。
(4) 退出逻辑
在整个自捕流程中,满足以下一条则软件退出自捕逻辑:
① 当人工干预切换天线工作方式时,软件自动退出自捕逻辑,切换为指定天线工作方式;
② 在判定捕获目标成功后,退出自捕流程。
3.2.2. 目标在主波束外情况下的捕获逻辑设计
在设备天线随动过程中,若目标相对天线位置大于跟踪主波束,则必须在天线随动状态下叠加扫描增大捕获目标概率才可能捕获目标 [8],但由于采用扫描工作方式,在扫描过程中,必然出现丢失目标、发现目标、目标进入主瓣、目标退出主瓣、丢失目标的过程,甚至于在整个扫描过程中,可能出现目标无法进入主瓣的情况,故目标相对天线位置大于跟踪主波束情况下的捕获逻辑重点也是主瓣识别。
目标相对天线位置大于跟踪主波束情况下的捕获逻辑包括准入逻辑、数据积累逻辑、捕获结果判定逻辑和退出逻辑。
(1) 准入逻辑
在天线随动叠加扫描过程中,当跟踪接收机锁定时,记录当前天线扫描位置相对随动轨道的角度差值为天线扫描偏差,天线继续扫描,比对连续两帧锁定数据中的AGC电压值(或信噪比值),当后一帧数据中AGC电压值(或信噪比值)大于前一帧数据中AGC电压值(或信噪比值)时,天线继续扫描,并记录后一帧数据时天线扫描位置相对随动轨道的角度差值为天线扫描偏差;直到后一帧数据中AGC电压值(或信噪比值)小于前一帧数据中AGC电压值(或信噪比值)时,取软件控制天线为随动叠加偏差的工作方式,即天线以随动轨道叠加天线扫描偏差为天线运行轨道;保持此状态,连续积累1 s测量数据,若过程中出现1帧以上失锁,则软件切换天线为随动叠加扫描工作方式,继续扫描搜索目标,重新进入准入逻辑;若连续1 s测量数据均锁定,则判定初始条件满足要求,可以进入自捕流程。
(2) 数据积累逻辑
在进入自捕流程后,针对连续2 s测量数据同时判断以下条件,用于判断目标是否在主瓣内:
① 采用最小二乘法计算方位误差电压ΔUA随机误差和俯仰误差电压ΔUE的随机误差序列,拟合数据20个,拟合阶数3阶,随机误差序列中至多4个随机误差超过门限值GA、GE;
② 方位、俯仰误差电压的平方和的均方根可表示为天线电轴偏离目标映射在空间位置,利用方位误差电压和俯仰误差电压计算目标偏离天线的空间误差电压值序列,最近连续20个目标偏离天线空间误差电压值序列中,至多2个超过门限G。
若同时满足上述条件,可以进入捕获结果判定逻辑,否则依据下述判据进行判断:
① 若连续2 s测量数据过程中出现5帧以上失锁,则退出数据积累逻辑,重新进入准入逻辑,并切换天线为随动叠加扫描状态;
② 若连续2 s测量数据计算结果不满足上述条件,则以新数据替代旧数据(FIFO)滑动计算结果,直至满足要求后进入捕获结果判定逻辑。
(3) 捕获结果判定逻辑
为了最大限度地避免系统处于副瓣跟踪和误跟踪,要对跟踪进行容错维护。
当软件进入捕获结果判定逻辑后,软件采用角误差电压驱动天线捕获目标,即试闭自跟踪状态,并保持试闭自跟踪状态1 s,在此期间采集跟踪的各个状态用于判断是否为主瓣跟踪且跟踪稳定。
① 计算此过程中天线方位角速度、俯仰角速度、方位误差电压绝对值、俯仰误差电压绝对值,方位误差电压变化率、俯仰误差电压变化率等;
② 当天线方位最大角速度绝对值、俯仰最大角速度绝对值同时大于10˚/s,则判定天线飞车,退出捕获结果判定逻辑,重新进入准入逻辑,并回退天线工作状态为试闭自跟踪前天线随动叠加扫描状态;
③ 若试闭自跟踪1 s内天线最大方位角速度绝对值、最大俯仰角速度绝对值不同时大于10˚/s,且方位误差电压、俯仰误差电压绝对值均小于1 V,或方位误差电压、俯仰误差电压趋于0 V变化,则认为捕获目标成功,转入主瓣识别流程;
④ 由于在副瓣跟踪时,由于系统差零深的斜率变化,如图1所示,系统环路的增益将发生变化,跟踪时误差电压比主瓣跟踪时的特性要差 [9],因此若误差电压特性不满足要求且AGC信号的迅速跌落则认为跟踪至副瓣,否则判定捕获目标成功,转入自跟踪状态,退出自捕流程。
(4) 退出逻辑
在整个自捕流程中,满足以下一条则软件退出自捕逻辑:
① 当人工干预切换天线工作方式时,软件自动退出自捕逻辑,切换为指定天线工作方式;
② 在判定捕获目标成功后,退出自捕流程。
3.3. 模型优化
在天线随动过程中,目标在主波束内和主波束外而言,目标穿越主波束情况、上述三种情况交叉出现等情况出现的概率较低,为了使模型应用具有普遍性,需要对模型的使用策略进行优化设计。
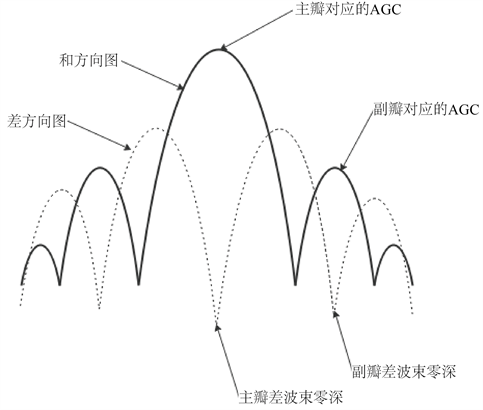
Figure 1. Sum difference pattern of main and side lobes
图1. 主副瓣和差方向图
任务前,需要事先计算以下时间点:天线随动开始时间、接收信号幅度高于设备跟踪门限时间、跟踪任务段开始时间等。
由于跟踪前无先验信息用于判定目标相对天线位置的具体情况,故在天线随动开始时间优先采用目标相对天线位置小于跟踪主波束情况下的捕获策略,并观察设备捕获情况,在接收信号幅度高于设备跟踪门限时间后一段时间内(视情而定,建议10 s~20 s)会出现以下情况:
① 设备正常捕获跟踪目标,则判定捕获目标成功;
② 设备无法捕获跟踪目标,则切换为目标相对天线位置大于跟踪主波束情况下的捕获策略;
③ 若目标相对天线位置处于穿越跟踪主波束情况,则叠加扫描后可使目标在一定时间内位于跟踪主波束内,可完成目标的捕获跟踪;
④ 若目标相对天线位置大于跟踪主波束,但小于跟踪主波束叠加扫描范围,则叠加扫描后也可使目标在一定时间内位于跟踪主波束内,可完成目标的捕获跟踪;
⑤ 若目标相对天线位置大于跟踪主波束,但大于跟踪主波束叠加扫描范围,则叠加扫描后仍无法使目标位于跟踪主波束内,此时需要增大扫描范围,但同时由于扫描范围的逐步增大,目标在主波束内可能停留时间逐步减小,可能出现不满足准入策略或数据积累逻辑的情况,可能无法完成目标捕获 [10]。
4. 试验验证
在某次跟踪任务中,设计了上述模型的验证试验,情况如下。
4.1. 试验流程
试验前,针对某窄波束天线跟踪段落设置了5个等待点,具体情况如下:
① 第一等待点设置为138 s,采用等待点叠加扫描结合自动捕获的工作方式;
② 第二等待点设置为200 s,采用程序引导结合自动捕获的工作方式;
③ 第三等待点设置为278 s,采用程序引导结合自动捕获的工作方式;
④ 第四等待点设置为320 s,采用程序引导叠加扫描结合自动捕获的工作方式;
⑤ 第五等待点设置为360 s,采用程序引导叠加扫描手动捕获的工作方式。
4.2. 试验结果
整个试验过程中跟踪情况如图2所示。
(1) 第一等待点捕获跟踪情况
从图2中可以看出,在第一等待点138 s处,采用等待点扫描叠加自捕功能,在107 s~112 s天线处于扫描状态,并在113 s软件判定满足连续锁定条件但不满足自动捕获条件;在124 s软件判定满足自动捕获条件,天线转自动捕获,但此时目标实际在副瓣状态,设备捕获目标失败,天线退出自动捕获,返回等待点叠加扫描工作方式;在127 s~130 s天线继续扫描,在130 s软件判定满足连续锁定条件,且满足自动捕获条件,天线转自动捕获,此时目标已进入主瓣,自动捕获成功,天线自动转入自引导跟踪状态;操作手在自引导跟踪状态下视情切换跟踪方式为主Ka自跟踪状态。
(2) 第二等待点捕获跟踪情况
从图2中可以看出,在第二等待点200 s处,天线转程序引导工作方式,此时天线随动,但目标相对天线位置偏差大于跟踪波束,整个过程中软件仅在214 s判定满足自捕条件,但自捕失败,返回程序引导工作方式,捕获目标失败。
(3) 第三等待点捕获跟踪情况
从图2中可以看出,在第三等待点278 s处,天线转程序引导工作方式,此时天线随动,但目标相对天线位置偏差大于跟踪波束,情况同第二等待点,捕获目标失败。
(4) 第四等待点捕获跟踪情况
从图2中可以看出,在第四等待点320 s处,天线转程序引导叠加扫描工作方式,此时目标相对天线位置偏差大于跟踪波束,天线随动同时通过叠加扫描增大捕获范围,在324 s软件判定满足连续锁定条件,并在328 s软件判定满足自捕条件,自动捕获成功,天线自动转入自引导跟踪状态;操作手在自引导跟踪状态下视情切换跟踪方式为主Ka自跟踪状态。
(5) 第五等待点捕获跟踪情况
从图2中可以看出,在第五等待点360 s处,天线转程序引导叠加扫描工作方式,此时目标相对天线位置偏差小于跟踪波束,但天线随动同时通过叠加扫描增大捕获范围,反而导致目标反复穿越跟踪主波束,操作员无法判定是否满足手动捕获条件;在366 s人工取消叠加扫描工作方式,仅采用程序引导工作方式,在370 s由操作员判定满足自引导跟踪条件,手动捕获目标成功,天线转入自引导跟踪状态;操作手在自引导跟踪状态下视情切换跟踪方式为主Ka自跟踪状态。
4.3. 小结
通过整个试验过程及试验结果,结论如下:
① 等待点工作方式中目标会穿越多个副瓣波束,不利于主瓣跟踪判定条件的软件自动化实现,而随动工作方式目标相对天线位置在较短时间内变化不大,利于主瓣跟踪判定条件的软件自动化实现,与自捕模型假设(3)一致;
② 在随动工作方式下,若目标相对天线位置偏差小于跟踪波束,则采用叠加扫描工作方式会适得其反,故在随动工作方式下应优先采用目标相对天线位置小于跟踪主波束情况下的捕获逻辑,然后根据实际情况判定是否需要叠加扫描工作方式;
③ 在随动工作方式下,若目标相对天线位置偏差小于跟踪波束,则采用目标相对天线位置小于跟踪主波束情况下的捕获逻辑可实现目标的自动捕获跟踪;
④ 在随动工作方式下,若目标相对天线位置偏差大于跟踪波束,则采用叠加扫描工作方式会增大捕获范围,提高捕获成功率;
⑤ 在随动工作方式下,若目标相对天线位置偏差大于跟踪波束过大,则采用叠加扫描工作方式仍然无法捕获目标。
通过本次实验验证,本文设计的自捕模型符合测控设备实际任务需求,可提高测控设备捕获跟踪目标的可靠性。
5. 结论
近年来,测控设备自动化运行是发展方向 [11],本文通过对某窄波束天线自动捕获关键策略进行分析论证,设计了其自捕模型,并在该设备中得到应用,应用结果表明,此模型可保证窄波束自动捕获跟踪目标的可靠性。希望本文提及的方法对其他测控设备的自动化运行提供参考价值。