1. 引言
随着计算机技术,光学和光电子技术的迅速发展极大地改变了传统的光学计量技术,新的三维传感和计量方法不断涌现。非接触三维自动测量是随着计算机技术的发展而开展起来的新技术研究,它包括三维形体测量、应力形变分析和折射率梯度测量等方面。应用到的技术有莫尔条纹、散斑干涉、全息干涉和光栅投影等光学技术和计算机条纹图像处理技术。条纹投影以及各种光栅投影自动测量技术在工业生产控制与检测、医学诊断和机器人视觉等领域正占有越来越重要的地位。本实验是利用投影式相位技术,对形成的被测物面条纹进行计算机相移法自动处理的综合性实验。投影光栅相位法是三维轮廓测量中的热点之一,其测量原理是光栅图样投射到被测物体表面(Fourier Transform Profilemetry, FTP),相位和振幅受到物面高度的调制使光栅像发生变形,通过解调可以得到包含高度信息的相位变化,最后根据三角法原理完成相位和高度的转换。根据相位检测方法的不同,主要有莫尔轮廓术、傅里叶变换轮廓术,相位测量轮廓术(Phase Measurement Profilometry, PMP),本实验就是采用基于条纹分析的相位测量轮廓术,在条纹的分析和处理中,傅里叶变换轮廓技术,是常用的方法之一 [1] [2]。随着技术不断高速发展,工业界对三维面形的测量的需求日益扩大,与此同时对其也提出了更高的要求,本文主要是基于FTP技术来对三维物体进行面形的测量。但是,FTP技术最大测量范围受到被测物体高度分布在光栅垂直方向上的梯度的限制,梯度过大时就容易引起频谱混叠,从而影响FTO技术的测量范围和测量精度。陈家壁等人提出了采用π相移技术来消除频域中的零频分量,进而减少频谱混叠现象,从而来提高FTP技术的测量范围 [3];陈文静等人提出了提高FTP技术测量精度的灰度图法 [4],都没有做详细的对比分析。综上所述,本文在上述研究结果基础上 [5] [6] [7],开展了用于FTP技术改进的π相移方法和灰度图法间的比较研究,通过实验的手段分析了这两个改进方法间的异同。
2. 测量原理
2.1. 实验流程
首先人们应该对投影到被测物体表面的条纹图进行采集,然后由一些相应的计算那些采集到的条纹图上面点的相位得到得相应的折叠相位图(这些方法包括有PMP技术、FTP技术、小波变换等技术) [8] [9],将这些折叠相位的图片展开成展开的相位,然后再结合相位–高度映射关系式计算出物体的高度分布。因此来获取它的深度的图像(这些设定的方法包含多项式方法、求解参数方法等),然后人们又把每个视角下的所采集到的图像来进行一系列的相关的匹配因而可以获得到它们之间存在的某种联系,然后人们再进行视图的合成从而可以得到物被测的对象的整个的三维模型图 [10] [11],使得光栅条纹在高速高精度实时三维测量中运用的非常广泛。
2.2. 基本原理
轮廓测量法利用数字滤波技术,将频率较高的载波和频率较低的面形分离出来,然后进行反变换,得到包含高度信息的相位,在通过标定得到的相位高度映射关系得到三维面型信息。FTP技术只用一幅图就可以得到相位值测量面型信息(PMP技术至少需要三幅图像),但该方法容易产生信息泄漏、混频、栅栏效应等会产生误差,通常情况需要采用数字滤波器也需要不断试错才能得到正确的参数。FTP典型光路图如图1所示,投影系统中心与相机光心的中心距离为d,投射系统中心或成像系统光心到参考面距离l。原来投射到参考平面上M点的光线,由于被测曲面的存在而只照到P点,这样,在CCD里看到P点的相位实际上跟参考光栅像中N的相位一样,即由于曲面高度对相位的调制,使得M点的相位移动到N点,相移值为
。设光栅频率为
,周期为
,则
。
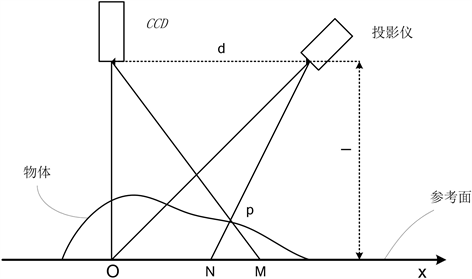
Figure 1. Optical path diagram of the Fourier transform profilometry technique
图1. 傅里叶变换轮廓术(FTP)光路图
投影系统将一正弦分布的光场投影到被测物体表面,由于受到物面高度分布的调制,条纹发生形变。由CCD摄像机获取的变形条纹可表示为:
(1)
其中
相表示投射光场中缓慢变化的背景分量,
表示条纹幅度,
是投射到参考面的光栅条纹频率,相位
是由被测物面形轮廓引起的相位变化,(1)式可以表示为:
(2)
式中,
,对(2)式进行一维傅里叶变换,可得:
(3)
(3)式的频谱示意图如图2所示。
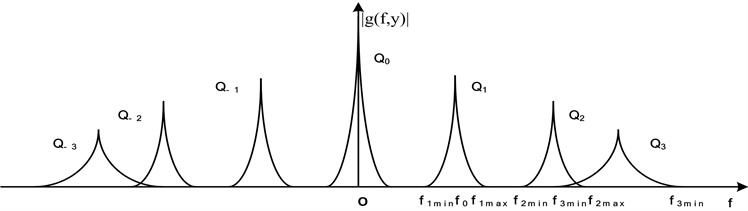
Figure 2. Spectrum diagram of Fourier transform technique
图2. 傅里叶变换频谱图
由于
相对于
变化缓慢,所以在频谱图中它们与
是分开的,即对应为图2中的直流分量Q0部分,而载频
(对应于图中Q1部分)携带有用的物体高度信息。用一适当的滤波器滤出载频分量
,并平移至原点为
,再进行傅立叶逆变换,可以得到:
(4)
(4)式中,
和
分别表示复数的实部和虚部,由(4)式获取的相位
是不连续的。对(4)式进行去包裹处理 [9],即可得连续的相位
,并由(5)式可求得物体的实际高度:
(5)
在FTP运算中,只有频谱中的基频分量对获取物体的高度信息是有效的,且频谱混叠限制了FTP的测量范围,由文献 [10] 可知,FTP法的测量限制条件为:
(6)
(6)式中说明,FTP最大测量范围受到在光栅垂直方向上相位的梯度以及物体高度的梯度限制。
由于FTP测量方法使用了傅里叶变换和在频域中的滤波运算,只有频谱中的基频分量对于获取物体高度信息是有效的,但是防止频谱混叠的要求限制了FTP技术的最大可测范围,下面给出定量分析。定义第n级频谱的局部空间频率为:
(7)
(8)
如图1为傅里叶变换频谱示意图,为防止各级频谱混叠,必须满足:
(9)
(10)
2.3. 改进FTP技术
对于一个复杂的物体表面,由于物体表面起伏较大,得到的条纹图十分复杂。例如,光栅条纹图形中存在局部阴影,光栅条纹图形断裂,在条纹局部区域不满足抽样定理,即相临抽样点之间的相位变化大于周期T。对于这种非完备条纹图形,相位展开是一个非常困难的问题,这一问题也同样出现在干涉型计量领域。最近已研究了多种复杂相位场展开的方法,包括灰度图法FTP技术、π相移法FTP技术、条纹跟踪法、最小间距树方法等 [12] [13] [14],使上述问题能够在一定程度上得到解决或部分解决。因此,本文主要通过改进灰度图法FTP技术和π相移法FTP技术解决物体表面起伏较大的问题。改进的FTP法主要是指灰度图法FTP技术和π相移法FTP技术,下面分别介绍这两种改进的FTP法的测量原理。灰度图法FTP技术(简称灰度图法)的测量原理是:在无光栅投影时,通过CCD获取物体的图像,此时光强分布可以表示为:
(11)
接着,在有投影光栅时,通过CCD获取物体的变形光栅图,其光强分布可以表示为:
(12)
对(11)式和(12)式进行一维傅里叶变换,可得,
(13)
对(13)式进行后减可得:
(14)
由(14)可知,通过灰度图法的处理,物体变形光栅图的频谱信息中的零频分量
被消除,只留下携带物体高度信息的基频分量。π相移法FTP技术(简称π相移法)的测量原理是:即在投影光栅沿栅线垂直方向移动0.5个周期(即移动π相位)前后分别对物体进行成像,进而获得物体的两幅变形光栅图,其光强分布分别由
、
表示,它们的表达式为:
(15)
对(15)式进行一维傅里叶变换后相减可得:
(16)
由(16)可知,通过π相移法的处理,物体变形光栅图的频谱信息中的零频分量
也被消除 [15] [16],同样只留下携带物体高度信息的基频分量 [17] [18]。由灰度图法以及π相移法的两种测量原理可知,这两种方法都将基频分量的频带低端扩展到2f0。因此,这两种方法的测量限制条件应相同,其限制条件的表达式为:
(17)
比较(10)式与(17)式可知,在测量系统参数的不变情况下,改进的(灰度图法和π相移法)FTP法的测量范围比传统FTP技术的测量范围提高了3倍。
3. 实验分析与讨论
实验时,被测物体示意图如图3所示,首先对高度梯度(k)为k = 3.6的物体成像,变形光栅图如图4所示,基于FTP技术如图、π相移法和灰度图法重建的三维物体实验结果分别如图5(a)~(c)所示。

Figure 3. Schematic diagram of the measured object
图3. 被测物体示意图
 (a) 原始光栅
(a) 原始光栅  (b) 受物体影响的变形光栅
(b) 受物体影响的变形光栅
Figure 4. Grating diagram
图4. 光栅图
由可知,传统FTP法的重建结果存在明显错误,而比较图5(b)~(c)可知,π相移法的重建结果是优于灰度图法的重建结果,这些结论与前面讨论一致。
 (a) 传统FTP法 (b) π相移法(c) 灰度图法
(a) 传统FTP法 (b) π相移法(c) 灰度图法
Figure 5. Results of three-dimensional profile measurement
图5. 三维轮廓测量结果
由于传统FTP法明显不能正确恢复三维轮廓,为进一步定量分析,采集三维物体第200行数据,通过均方根(RMS)误差比较灰度图法和π相移法的精度,试验结果如表1所示,数据表明π相移法可行有效,测量精度更高,具有较强的适用性。

Table 1. Comparison of the root mean square (RMS) error between the actual and measured values (mm)
表1. 实际值与测量值的均方根(RMS)误差比较 (mm)
4. 结论
本文对3种FTP技术进行了分析研究,其中包括两种改进的FTP法(π相移法和灰度图法)的测量范围进行详细说明,并结合实验的方法对传统FTP法以及两种改进FTP法的测量范围进行了对比研究。结果表明,在大梯度情况下,π相移法的测量结果要优于灰度图法的测量结果,且随着物体高度梯度值的增加,π相移法的测量结果逐渐优于灰度图法的测量结果。
基金项目
诚挚感谢衢州市科技计划指导性项目(2021068)资助。
参考文献