摘要: 本文主要设计了树木喷涂机机械臂的结构,此结构主要由底部小车,连接传动部分,驱动控制系统组成,实现对树木喷涂工作,设计了大中小3种规格的机械臂,以及底部的小车。对底部车架进行了模态分析,并进行了优化,得到了车架优化前后的前四阶固有频率和对应的振型。优化后车架的固有频率远低于车架的工作频率,避免了车架在工作过程中因共振对结构造成破坏。并利用有限元软件对底部车架进行了优化设计和有限元分析,得到了其位移及应力分布。优化后车架的受力比原结构减少了1140.4 MPa。
Abstract:
This paper mainly designs the structure of the robotic arm of the tree spraying machine. This structure is mainly composed of the bottom trolley, the connecting transmission part, and the drive control system to realize the tree spraying work. Three sizes of large, medium and small robotic arms and the bottom trolley are designed. The modal analysis and optimization of the bottom frame were carried out, and the first four-order natural frequencies and corresponding mode shapes were obtained before and after the frame optimization. After optimization, the natural frequency of the frame is much lower than the working frequency of the frame, which avoids damage to the structure of the frame due to resonance during the working process. The optimal design and finite element analysis of the bottom frame were carried out by using finite element software, and its displacement and stress distribution were obtained. The force of the optimized frame is reduced by 1140.4 MPa compared with the original structure.
1. 引言
冬季气候昼夜温差大,树木会冻伤。当树木底部涂上了一层石灰,大部分太阳光以及各种光辐射会被反射,有效避免了树木体内温度过高,减少了昼夜温差,将树木受到的冻伤伤害降低,达到防寒保暖的目的。石灰还具有一定的杀虫、杀菌的作用 [1]。为确保路边行道树和公园景观树等乔木植物免遭病虫害侵袭,给树干涂白是一种高效绿色的树干保护方式 [2],一直以来涂白工作均采用人工作业的方式,手工涂白工作繁琐,工作效率低,劳动强度较大,而且喷涂不均匀。随着科技生活的发展人工的成本越来越高,增加了树木涂白的作业成本 [3]。给树木涂白多采用传统的刷子进行涂刷,但是涂白工作劳动强度大、效率低,涂白质量差和涂白高度层次不一 [4],或采用喷枪喷涂,虽然速度快,但无法解决用料量和环境污染等问题 [5]。人工涂白效率低,耗时长,需要大量劳动力。且现有辅助涂白工具体积较大,实用性不强 [6],对于较为茂密的树林以及车水马龙的街道来说无法进入,并且单人操作不便,需2至3人一同操作使用机械设备,且需要一定的操作技术。虽亦有一些较为小型的机械设备,但其装置内部结构亦过于繁杂,使得其体积对于单人操作也过于偏大,操作不便。同时现存大型设备涂白过程中,设备喷涂出的涂液量不易控制,会造成资源浪费以及污染环境 [7]。为解决树木涂白人工成本过高,工作效率低,喷涂质量不均匀等问题,极需研制树木喷涂机。机械臂是树木喷涂机的重要组成部分。机械手臂要能实现上下,左右和旋转运动,连接喷头进行各个方向的喷涂,机械臂不仅能控制喷涂机的喷涂范围,并且当喷射装置去除后不能有大回弹,所以喷涂机机械臂的设计和优化非常重要。本文的主要研究内容是通过对喷涂机的机械臂进行设计,并运用有限元分析工具对其受力进行分析,最后对机械臂的结构进行优化,为树木喷涂机机械臂的合理设计提供理论依据。
2. 树木喷涂机机械臂的结构
树木喷涂机机械臂的结构图如图1所示,树木喷涂机机械臂主要有末端连接板、末端连杆、末端缸体、中上臂连接板、中上臂小臂延伸、中上臂小臂、中臂活塞杆、中臂连接板、大臂活塞杆、大臂连杆、回转架、底部小车车架、万象刹车轮、大臂、大臂三角连接板、中臂、中下臂连杆等构成。
3. 底部车架的静力分析
3.1. 底部车架的有限元模型
机械手臂主要采用高强度塑料,质量较轻,对强度要求不高,故不进行应力应变分析,而全部装置都安装在底部车架上,且手推车需进行长时间拖动,所以对底部车架进行有限元分析 [8]。底部车架的有限元模型如下图2所示。
 1末端连接板;2末端连杆;3末端缸体;4中上臂连接板;5中上臂小臂延伸;6中上臂小臂;7中臂活塞杆;8中臂连接板;9大臂活塞杆;10大臂连杆;11回转架;12底部小车车架;13万象刹车轮;14大臂;15大臂三角连接板;16中臂;17中下臂连杆。
1末端连接板;2末端连杆;3末端缸体;4中上臂连接板;5中上臂小臂延伸;6中上臂小臂;7中臂活塞杆;8中臂连接板;9大臂活塞杆;10大臂连杆;11回转架;12底部小车车架;13万象刹车轮;14大臂;15大臂三角连接板;16中臂;17中下臂连杆。
Figure 1. The whole assembly drawing of the robotic arm of the tree spraying machine
图1. 树木喷涂机机械臂整体装配图
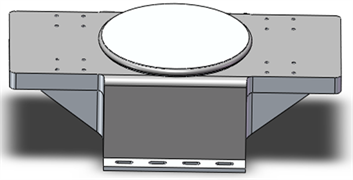
Figure 2. Finite element model of the bottom frame
图2. 底部车架的有限元模型
3.2. 定义材料
本文对机械臂的优化设计是在满足强度和刚度要求的前提下,通过结构轻量化设计和选择合适的材料两种渠道来实现设计要求的。目前用于喷涂机机械臂的基本构架的材料多采用铝合金,其中又以铝合金2A12 (原牌号为LY12)最为常见。本文以此为研究对象,从机械臂安全稳定和保证运动精度的角度出发,选择合适材料,对机械臂进行减重等轻量化优化设计研究。7075铝合金被广泛用于汽车、航海和航空等交通领域。它是第一种成功的Al-Zn-Mg-Cu系超硬铝,具有许多优点,包括拥有很高的强度密度比例,固溶处理后塑性好,可加工性好,热处理后强化效果明显,特别好的低温强度等。其中又以7075-T651铝合金的综合性能最好,表1所示为7075与常用铝合金材料2A12的性能对比,可见在两种材料的密度相差不大的情况下,7075的屈服强度明显高于2A12的屈服强度,所以本文研究采用7075铝合金来制造机械臂的构架 [9]。

Table 1. Comparison of the material properties of 7075 aluminum alloy and 2A12 aluminum alloy
表1. 7075铝合金与2A12铝合金材料性能比较
3.3. 优化分析
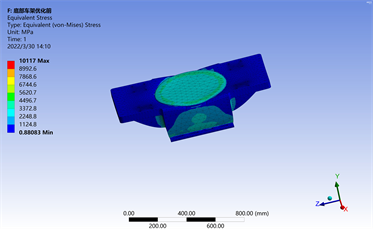
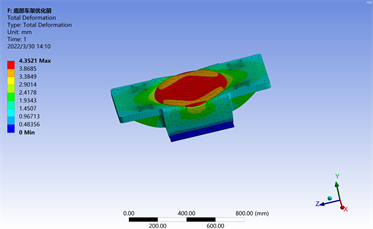
利用ANSYS软件对最大工况下车架的有限元模型进行分析,考虑车架实际工作过程中的约束和载荷情况,分别对原结构和优化的结构进行有限元分析,对车架底部施加固定端约束,对另一端施加3600 N的载荷,划分网格后进行计算。如图3所示,原结构在载荷下承受的最大应力为10,117 MPa,通过云图可以看到结构两端部分受到的应力比较小,所以对该部分进行减重设计,去除车架两端的板筋,再对优化后的结构进行有限元分析,改进后的结构承受的最大应力为8976.6 MPa,零件的安全系数大于10。如图4所示,对原结构和改进后的结构进行位移分析,由对比结果可知,原结构最大位移为4.3521 mm,减重设计后结构的最大位移为4.897 mm,两者差距很小,都在允许范围之内。还可通过对其他关键零部件的仿真,实现对机械臂的轻量化优化设计,保证机械臂的强度和刚度达到要求。
 (a)
(a)  (b)
(b)
Figure 3. Finite element stress analysis of the bottom frame. (a) Stress cloud diagram of the original structure; (b) Improved stress cloud map
图3. 底部车架的有限元应力分析。(a) 原结构应力云图;(b) 改进后的应力云图
 (a)
(a) 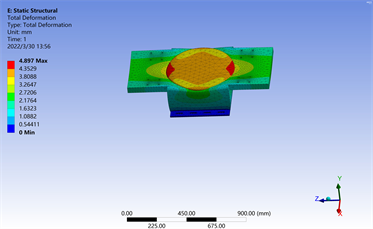 (b)
(b)
Figure 4. Displacement analysis of the bottom frame. (a) The original structural displacement cloud map; (b) Improved displacement cloud map
图4. 底部车架的位移分析。(a) 原结构位移云图;(b) 改进后的位移云图
4. 底部车架的模态分析
4.1. 模态分析计算
基于模态分析理论,应用ANSYS Workbench有限元软件对振动筛结构进行模态分析计算。约束条件为底端固定端约束,外加载荷为3600 N。分析设置中的最大模态数设置为4,提取振动筛的前四阶固有频率和阵型,如表2和图5所示。
Table 2. Optimize the natural frequencies of the front four orders of the front bottom frame
表2. 优化前底部车架前四阶固有频率
4.2. 模态分析结果
在计算出的前四阶固有频率的基础上计算各阶所对应的振型,结果如图5所示。以图中坐标系为参考,一阶振型主要为车架两端左右弯曲振动;二阶振型主要为车架顶部向上弯曲振动;三阶振型为车架两端向外弯曲振动;四阶振型为车架两端侧向弯曲振动。
 (a)
(a) 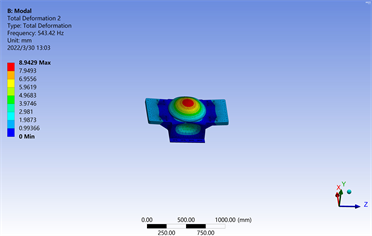 (b)
(b)  (c)
(c)  (d)
(d)
Figure 5. The first four-step mode shape of the frame at the bottom of the original structure. (a) First-order mode shape; (b) Second-order mode shape; (c) Third-order mode mode shape; (d) Fourth-order mode shape
图5. 原结构底部车架的前四阶振型。(a) 一阶振型;(b) 二阶振型;(c) 三阶振型;(d) 四阶振型
4.3. 模态分析结果的优化
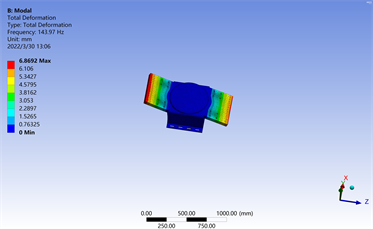
利用ANSYS软件对车架进行模态分析,考虑车架实际工作过程中的约束和载荷情况,分别对原结构和优化的结构进行模态分析,对车架底部施加固定端约束,划分网格后进行计算。如图6所示,底部车架的固有频率为464.37 Hz,因为底部车架的工作频率为470 Hz,底部车架的固有频率与底部车架的工作频率比较接近,容易引起共振,破坏车架的结构。所以对车架进行了优化,优化结果表3所示,优化后小车的固有频率为143.97 Hz,远低于车架的工作频率,避免了车架在工作过程中因共振对结构造成破坏。
 (a)
(a) 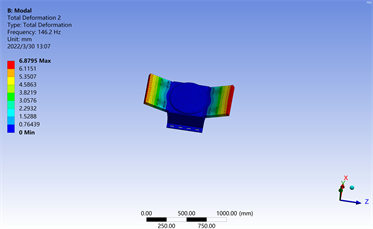 (b)
(b)  (c)
(c) 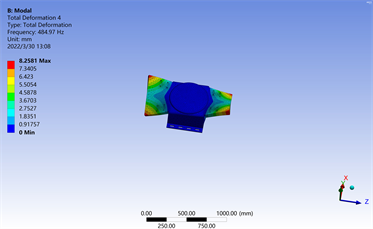 (d)
(d)
Figure 6. The front four-step mode of the improved rear bottom frame. (a) First-order mode shape; (b) Second-order mode shape; (c) Third-order mode shape; (d) Fourth-order mode shape
图6. 改进后底部车架的前四阶振型。(a) 一阶振型;(b) 二阶振型;(c) 三阶振型;(d) 四阶振型
Table 3. Optimized rear bottom frame front four-step natural frequencies
表3. 优化后底部车架前四阶固有频率
5. 结论
1) 本文设计了树木喷涂机机械臂的结构,考虑到喷涂机实际的作业情况,底部的车架有两种设计方案,可以满足在不同道路上的使用要求。小臂采用伸缩杆的形式,可以实现一定范围内不同位置和高度的树木喷涂工作,具有实用性和创新性。
2) 利用ANSYS软件对底部车架进行了优化设计并进行了有限元分析,得到了位移及应力分布。结果表明:优化后车架的受力比原结构减少了1140.4 MPa,优化后车架的质量比原结构减轻了16.37 kg,位移略有增加,但在允许范围之内。
3) 利用有限元软件对底部车架进行了模态分析,并进行了优化,得到了底部车架的前四阶固有频率和对应的振型,其中一阶固有频率464.37 Hz与工作频率接近,容易引起结构的共振,优化后小车的固有频率为143.97 Hz,远低于车架的工作频率,避免了车架在工作过程中因共振对结构造成破坏。
参考文献