1. 引言
在对北斗导航接收机进行复杂电磁环境效应的研究中 [1] [2],参考了认知无线电 [3] [4] [5] 和认知电磁兼容 [6] [7] [8] 的方法,提出了认知电磁环境适应(Cognitive Electromagnetic Environment Adaptation, CEEA)这一新概念、新方法。之前对这一想法的内涵及其涉及的技术进行了简要综述 [9],已经发表了相应的论文,在此不过多赘述研究背景。而在后期的工程实现和验证的研究中,对部分内容做出了改善,最后逐步实现并验证了CEEA的可行性,并实现了CEEA软件化系统平台的搭建。
CEEA的基本思路是利用人工智能控制技术,令用频设备自适应复杂电磁环境,这个思想参考了软件无线电。具体来说就是,通过识别外界电磁环境和设备自身电磁环境效应建模,利用人工智能控制技术,使设备自己实时地抵抗电磁干扰,自适应地完成电磁兼容与防护的目的。在此全面详实地提出整个CEEA系统的基本原理、体系构架和应用的技术。
2. 认知电磁环境系统基本框架
CEEA系统的具体结构如下:
CEEA是一个综合多种技术的新概念、新方法,图1是其概念设计图,其中射频前端可以采用认知无线电的射频前端,具体的方法是:
1) 通过设备的电磁环境效应试验,分析机理,建立互调干扰预测模型,以确定干扰信号的参数信息和干扰阈值。需要注意的是,效应试验不能穷尽所有干扰,但是会随着不断地试验一点点分析出越来越多的效应机理,这是CEEA的理论基础。根据干扰预测模型来设计底层的干扰抑制算法,陷波会直接抑制模型中预测的互调干扰信号。
2) 认知电磁环境是为了分析接收到的电磁信号中的互调干扰成分。如果有干扰预测模型之外的干扰信号,造成设备性能的降级,这时人工智能会控制认知模块分析此时的电磁环境信号,记录下此时的干扰信号的参数,并将参数传输进陷波模块将干扰滤除。同时认知模块本身也有信号分解的能力,可以分离出一部分干扰。

Figure 1. Conceptual map of cognitive electromagnetic environment adaptation system
图1. 认知电磁环境适应系统概念图
3) 陷波模块只能滤除带外窄带干扰,对于带内干扰,则通过计算正交化之后的接收信号和期望信号的相关性来区分干扰和工作信号。并在最后计算设备的性能参数,判别是否存在干扰,如存在,则将信息传递给人工智能控制模块。例如,如果以误码率为判断参数,假设出现误码率大幅下降的情况,则判定出现了一种干扰预测模型之外的干扰。然后将指令传输给人工智能控制模块,人工智能控制模块会指令认知模块将此时接收的信号参数传输过来,并中转给陷波模块,通过陷波消除干扰直至误码率最后恢复正常。
4) 人工智能控制模块综合整个系统的信息,进行决策和下达指令,还可以像认知无线电一样 [10],根据需要调整射频前端的器件,以更好的接收信号。同时,记录下不在互调干扰预测模型中的新干扰的参数,之后可以作为预测模型的补充,如果再出现同样的干扰就直接滤除。
5) 这里需要注意,CEEA干扰防护有两种途径,一是通过电磁环境效应试验建立的互调干扰预测模型,来预先设计陷波或滤波;二是通过认知电磁环境模块和人工智能控制,识别并自适应抑制在干扰模型之外的干扰。两者并行,各有优势和局限:前者通过预先设定干扰信号,如果出现相应的干扰可以直接滤除,减少了防护的反应时间。局限在于效应无法穷尽,而且试验需要大量人力和时间。作为补充,后者优势在于可以让设备现场自适应的进行干扰分析和抑制,虽然和干扰预测模型的直接滤除相比,会有更多的延迟和反应时间,但是比进行效应试验更节约时间和人力成本。当然,后者也有局限,在于不能自适应识别所有干扰,例如硬损伤。而这恰恰是效应试验可以完成的功能。因此,两者是互相补充,相辅相成的关系。
综上所述,虽然目前并不能完完整整地将这个方法彻底实现并工程应用,只是基于所研究的北斗导航接收机互调阻塞效应和机理研究、人工智能技术、认知电磁环境方法和互调干扰抑制方法,主要针对数字用频设备的非线性失真造成的干扰,结合MATLAB、FPGA,提出并完成半仿真半实物的认知电磁环境适应的可行性论证。但是现在的CEEA系统已经可以有效地抑制互调干扰、带外非互调窄带干扰和超宽带脉冲干扰。
以下详细地论述CEEA系统的可行性,第一章分节展开介绍了各个功能模块,第二章介绍了半实物软件平台的构建,第三章总结。
3. 系统的功能实现
3.1. 干扰预测模型
互调阻塞干扰效应和机理研究是提出CEEA的起点,在对北斗导航接收机二阶低频阻塞干扰和三阶互调阻塞干扰效应的研究中,通过机理分析,建立了这两种干扰的预测模型,相关研究方法已发表 [1] [2],篇幅所限,在此不过多赘述。正如文献中所述,互调干扰一般落在带内或者临频带,很难滤除。最好的抑制互调干扰的途径就是在互调之前就将可以生成互调干扰的源频率滤除(以下简称互调频率),而这就需要对设备互调干扰效应进行研究,目的是全面缕清设备对互调频率的敏感频带,需要解决哪些频率可以引起互调干扰,造成损伤的程度如何等问题。这也是建立干扰预测模型的目的。根据之前总结的设备复杂电磁环境效应研究方法,已经可以得出某型导航接收机的二阶、三阶互调阻塞干扰模型,其带外敏感频带及阈值情况见图2~4。
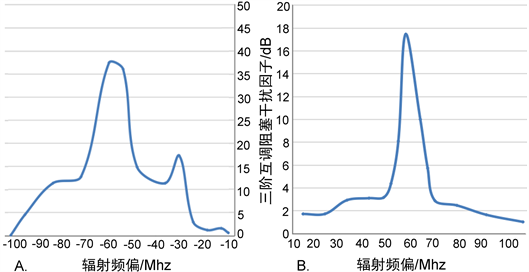
Figure 2. Third order intermodulation blocking interference factor and radiation frequency offset
图2. 三阶互调阻塞干扰因子与辐射频偏
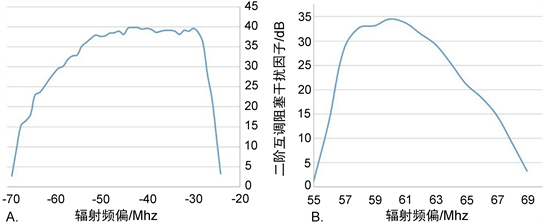
Figure 3. Second order intermodulation blocking interference factor and radiation frequency offset
图3. 二阶互调阻塞干扰因子与辐射频偏

Figure 4. Second order intermodulation low frequency interference level and radiation frequency difference
图4. 二阶互调低频干扰电平与辐射频差
图2和图3横坐标为辐射频偏,表示干扰频率偏离工作频率的距离,负数表示低于工作频率,正数表示高于工作频率;纵坐标为互调阻塞干扰因子,表示设备受不同互调频率的影响程度,越高则越容易被干扰。其数值即作为陷波深度的指标。图4横坐标为辐射频差,即两个干扰信号的差值。二阶互调阻塞干扰与两个干扰信号的频率差有关系,接收机只在图示的频差范围内受到干扰。纵坐标轴为二阶的低频干扰电平,表示可以引起干扰的互调频率的强度,越低则越容易被干扰
图2~4可以明确清晰地显示出二阶、三阶互调干扰对导航接收机的阻塞效应。因为陷波必须预设陷波零点,可以以此在陷波算法中预设陷波频点和程度。并以此为基础,增加陷波的自适应性。即,如果出现了图中所示的敏感频率,则根据其干扰因子设置陷波深度,自动形成陷波并滤除。同时因为不论二阶还是三阶互调干扰,都是由两个以上干扰信号互调产生,因此,只需要消除其中一个干扰信号,即可消除互调干扰。在此设计一个自适应条件,为了降低陷波损耗,因此当出现互调干扰时,只消除两个干扰信号中小的一个。同时,由图3的二阶互调频差的低频干扰电平可得,只有频差在1~23 MHz内的才会产生二阶互调干扰,因此超出23 MHz频差之外的二阶互调干扰信号也可不必考虑,如此也可节约陷波资源。
3.2. 认知电磁环境
“认知”是CEEA的重要特征,来源于认知无线电和认知电磁兼容。其内涵就是通过探测、分析设备周围的复杂电磁环境,提前做出相应的决策,从而规避(或者消除)干扰。而一般电磁环境很复杂且在实时变化,这就要求CEEA的认知能力应该具有快速和全面的电磁环境分析能力。
基于此,提出了一种动态数据驱动方法来实时分析复杂电磁环境。首先将动态模态分解方法与多分辨率分析方法集成,使其能够稳健地将复杂电磁信号以不同的分辨率分离为不同时空尺度的分量。之后利用其对瞬时频率的精确捕捉能力,提取时间模态及其对应的动态空间模态。同时利用时频分布,对各模态瞬时能量特征进行采集。然后,对时空相关联的电磁信号进行时频–能量分析,这种动态的分解分析方式能快速侦测电路和电子系统的多方面电磁环境状态,以达到快速全面的认知复杂电磁环境的目的。同时,还验证了该方法可以有效分离电磁信号中的超宽带脉冲,可以消除部分宽带脉冲信号引起的带内干扰。具体的研究内容已发表,参考文献 [11],在此不过多赘述,在此只论述后期新研究出的分离超宽带脉冲的内容。具体仿真流程是在MATLAB中建立时空关联的主信号同时混杂脉冲噪声,并用提出的方法分离。
主信号沿x轴正方向传播,周期T设置为10 ns。频率设置为100 MHz,其公式如下:
(1)
脉冲噪声设置50%占空比,周期1 ns,幅度大小与主信号最大幅度一致。
分离前后脉冲信号对比见图5,最后计算两者的均方误差(mean squared error, MSE):
(2)
两者均方误差小于5%,验证了此方法可以分离出超宽带脉冲信号。
认知电磁环境模块主要功能是实时分析外界电磁环境,并将出现的干扰信号的参数传输给陷波模块。
3.3. 自适应陷波
一般认为,互调干扰不可消除,传统上解决互调问题的一般方法是提高硬件性能以减少非线性,但这种代价是非常高昂的。目前研究的方法中,抑制或消除的都是设备内部的互调产物中非工作频率的干扰。而对于工作频率的互调产物目前并没有有效可行的抑制办法,因为这将导致工作信号同样被抑制。互调最大的危害就是产生接近工作频率的干扰,因此最好的途径就是在互调之前就消除干扰信号源,否则工作信号的处理必定会受影响。这就需要面对以下三点情况:1) 可以互调产生工作频率的频率(以下简称互调频率)非常多,需要全面厘清;2) 由于不同设备的具体参数的复杂多样,其对众多互调频率的敏感程度也不一定相同,即同样大小的不同的互调频率产生干扰程度未必相同,这也就导致了通过仿真建立的互调或者非线性模型存在技术隐患;3) 就目前的研究方法而言,都必然增加额外的硬件或信号处理的负担,插入损耗是个必须解决的问题。

Figure 5. Separated pulse signal and compared with the original signal
图5. 分离出脉冲信号与原信号对比
这也相对应的为CEEA的陷波模块提出了3点要求:1) 必须可以多频陷波;2) 插入损耗必须小;3) 需要提供预设的陷波零点。第一节的干扰预测模型可以满足第三点要求,而目前也完成了对于多频小损耗陷波器的研究 [12],相应的方法还可以参考文献 [13] [14] [15],在此不过多赘述。
3.4. 自相关和正交化
对于用频设备而言,带外干扰可以直接消除,困难在于带内干扰。对设备性能引起降级甚至损害的根因一般都落脚于带内,带内存在强干扰,导致工作信号被压缩甚至淹没,目前对于带内干扰没有很好的抑制方法。因此,最终判断设备是否存在干扰的判据也应该在带内产生。相关研究可以参考文献 [16] [17]。
基于此,对于数字用频设备,提出了有效带内干扰的概念,采用了正交化接收信号和工作信号的自相关函数的方法,和期望的工作信号不相关的即为有效带内干扰,相关的则为有用信号,以此为唯一标准。并建立起了正交化的自相关输出谱和系统性能参数(主要是信噪比)之间的联系,通过量化带内有效干扰来准确评估、度量设备受干扰的影响,这个结果将直接影响CEEA的运行状态。如果判断出现了不可接受的干扰影响,则会将带内干扰的参数传输给人工智能控制模块,进行抑制干扰的程序。
系统信噪比定义为信号功率与总噪声功率的比值,通常在AWGN信道为线性的情况下估计。而在固定的AWGN功率下,有效带内干扰会增加系统的误码率,因此需要另一种信噪比定义来定义有效带内干扰与系统性能之间的关系。基于此,用有效信噪比(也称为信噪和失真比,Signal-to-Noise and Distortion Ratio,SNDR)来衡量系统性能,有效信噪比是指在工作频带内,信号功率与AWGN和非线性失真功率的比值。为了推导带内失真与有效信噪比及系统误码率之间的关系,有效带内干扰表示为:
(3)
其中,
为正交化后带内不相关的有效干扰的频谱。
(4)
(5)
其中,
为带内有效(相关)信号分量;N0为噪声;B为带宽。
计算有效带内干扰的流程见图6,公式(4)和(5)为正交化的自相关输出谱与信噪比的关系。

Figure 6. Measure and quantify effective in band interference
图6. 测量并量化有效带内干扰
3.5. 人工智能控制模块
人工智能控制模块是整个CEEA的核心,也是CEEA能够实现的关键,来源于认知无线电的人工智能理念。其综合整个系统的信息并进行处理,控制其他四个模块完成功能。其实现主要通过FPGA编辑的逻辑控制算法完成,具体见第二章。
4. 半实物软件平台的搭建
对于CEEA的实现,参考了软件无线电的软件化概念。相对于纯硬件系统的固化、封闭,软件化系统具有较强的灵活性和开放性。软件系统采用一般采用标准化、模块化的结构,其硬件可以随着器件和技术的发展而更新或扩展,软件也可以随需要而不断升级。软件无线电的基本思想就是电子设备功能的实现尽量少的依靠硬件,而主要取决于驻留在DSP中的信号处理算法。传统的硬件无线电通信设备只是作为无线通信的基本平台,而许多的通信功能则是由软件来实现。
而CEEA作为一个新提出的方法,目前还不能直接工程应用,因此设计了半实物的实验验证方法来证明其可行性。具体是利用FPGA建立了基本的软件化平台,编辑有上述5个功能模块。同时在MATLAB和Simulink上建立了一个仿真模拟的北斗导航定位和通信系统。两者结合形成闭环,北斗导航定位系统可以产生卫星定位信号,Simulink产生干扰信号,两者结合输入FPGA进行认知电磁环境适应方法的信号处理,输出的结果返回至MATLAB计算伪距误差,并在最后计算有效带内干扰和有效信噪比,实现了认知电磁环境适应系统的半仿真半实物实验验证。
图7为FPGA设计图,其中,系统时钟50Mhz经过PLL时钟模块后,输出200 Mhz的时钟,用于IDELAYCTRL原语的参考时钟;GMII TO RGMII模块负责将双沿(DDR)数据和单沿(SDR)数据之间的转换;ARP顶层模块解析ARP请求命令,并返回FPGA的MAC地址;以太网控制模块根据输入的ARP接收完成信号类型,控制ARP顶层模块返回ARP应答信号,并根据当前接收到的协议类型,选择切换ARP顶层模块和UDP顶层模块的GMII发送侧引脚;UDP顶层模块实现了以太网UDP数据包的接收、发送、CRC校验的功能。各个功能模块主要是对接收到的信号进行处理。同步FIFO模块是由Vivado软件自带的FIFO IP核生成的,FIFO的大小为2048个32 bit,为了能够满足单包数据量较大的情况,在此把深度设置为2048,宽度为32位。
图8为Simulink通信设计图,包含了通信信号及干扰的产生源和Simulink与FPGA通信信息交互端口。

Figure 8. Simulink communication design
图8. Simulink通信设计图
图9为Simulink通信信息终端处理详情,计算有效带内干扰和信噪比,最终完成信号处理与通信。

Figure 9. Material drawing of system platform
图9. 系统平台实物图
图10为系统平台整体实物图。
实验流程如下:
1) 连通整个系统,但不打开CEEA功能;
2) 开启北斗导航定位系统,完成定位;
3) 打开Simulink的干扰源,释放干扰信号,干扰的频率为图2~4显示的敏感频率(或者超宽带脉冲信号),MATLAB计算并记录下此时的定位信息;
4) 打开CEEA,MATLAB计算并记录下此时的定位信息;
5) 输出结果。

Figure 10. Processing diagram of communication information terminal
图10. Simulink通信信息终端处理图
最后实验结果如下图所示,图11为开启CEEA前后,三维定位误差(dX, dY, dZ)的对比图;图12为开启CEEA前后,三维均方根误差(Root Mean Square,RMS,无量纲)的变化过程;图13为开启CEEA后,导航最终的定位精度因子(Position Dilution of Precision,PDOP,无量纲)。
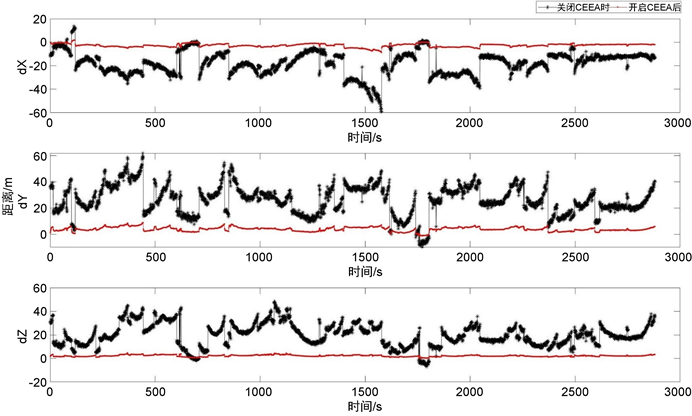
Figure 11. Comparison diagram of three-dimensional positioning error
图11. 三维定位误差对比图

Figure 12. Changes of 3D positioning RMS before and after CEEA
图12. CEEA前后三维定位RMS变化
DPOP基本保持在1.5以内,证明了CEEA良好的性能。
5. 总结
参考认知无线电,将“认知”和人工智能引入电磁兼容与防护领域,提出了认知电磁环境适应这一新方法。在分别研究了所涉及的各个功能模块后 [1] [9] [11] [12],在此对系统整体进行概述并提出了半实物的试验验证方法,最后证明了CEEA的可行性。
1) CEEA基于电磁环境效应机理研究,在其基础上,可以极大的缩减设备对复杂电磁环境的适应能力和抑制电磁干扰的反应时间。电磁干扰是无法穷尽的,关于干扰的研究是永远落后于新干扰的出现的。新干扰出现之后,研究人员往往需要花费很多时间和精力来研究新出现的干扰,之后才能在新设备上应用或对旧设备的硬件改进升级,如此反复,极其耗费人力财力物力。而CEEA的提出可以在一定方面减少这种损耗,加快应对干扰的时间。同时基于软件化的应用,CEEA的改进升级也相对方便,这是CEEA最大的优势。
2) 目前来看,CEEA也有一定缺陷。a) CEEA无法自适应对硬损伤类的干扰;b) CEEA的根基在于软件化和人工智能控制,这两者的研究进展将决定CEEA的性能。但就目前的发展进程来看,虽然CEEA可以实现,但是在工程应用上仍受到两者限制;c) CEEA还面临一个很大的困难,那就是和具体用频设备的结合。理论上所有用频设备都可以结合CEEA,形成一套独立的系统,但是这也意味着设备的负担会大增,而且可能存在兼容性问题。因此,CEEA的精简和兼容是之后很重要的研究方向。
参考文献
NOTES
*通讯作者。