1. 引言
传统水听器多利用压电效应或磁致伸缩效应感知水下声场的声压强弱这一标量信号。随着人类海洋活动的增加,海洋环境噪声dB水平越来越高,与此同时潜艇和舰船等敏感目标自身的噪声辐射水平显著下降。若单纯依靠声压标量信号来探测目标,目标特征信息极易被淹没在海洋环境噪声中。在传统声呐系统信噪比SNR面临瓶颈的背景下,矢量水听器应运而生。所谓“矢量”是指除了感知声场声压p这一标量之外,还能同时拾取声场质点x、y、z三个正交方向上的振速信息,对声场特性描述更加完备 [1] [2] [3]。
此外,矢量水听器具有良好的“8字”型空间指向性,在海洋环境噪声为各向同性的假设下,其信噪比与传统的标量水听器相比可提高10 dB~18 dB [2],在探潜和蛙人侦听等军事领域有重要的应用价值。哈尔滨工程大学、海军潜艇学院、中北大学、西北大学、中国科学院声学研究所和中国计量大学等科研机构对矢量水听器开展了卓有成效的研究工作 [1] - [10]。鉴于矢量水听器的设计与应用涉及诸多复杂的水声学公式,对于声呐操作技术人员有一定难度。本文对矢量水听器质点振速拾取原理、敏感性与指向性测试方法、波达方位估计(Direction of Arrival, DOA)原理和新型MEMS矢量水听器原理进行归纳阐述,以期抛砖引玉,有助于声呐技术人员对矢量水听器基本原理的理解与掌握。
2. 矢量水听器质点振速拾取原理
图1为哈尔滨工程大学研制的矢量水听器,其外形为球体并通过弹簧弹性安装在浮标支架上,以保持自由浮沉状态。处于水下声场中的刚性球体,可借鉴线性系统的幅频特性与相频特性得到其振速为激励水声信号波长
的函数。若刚性球体半径
则球体振速与未放置球体时该质点处振速具有如下关系:
(1)

Figure 1. Real picture of vector hydrophone [1]
图1. 矢量水听器实物图 [1]
式中,
为刚性球体振速,
为未放置球体时声场质点振速;
为球体密度,
为介质密度。可见,当刚性球体密度等于海水密度时,球体的振速等于声场质点振速。若在球体内灌封振速传感器即可拾取质点振速,对于高频水声信号可以采用振动加速度计来进行矢量通道测量。矢量水听器外型多为圆形,亦可采用圆柱形。矢量水听器外壳和灌封材料的声阻抗应等于海水阻抗,以便最大效率地接收水声信号能量,提高矢量水听器的灵敏度。声阻抗公式:
(2)
式中,
,
分别为声波传输介质密度和声速。计算可得海水声阻抗为1.5 × 106 Ns∙m−3,聚氨酯材料的声阻抗与之接近,故常选用聚氨酯材料作为矢量传感器的外壳和填充物。
图2为海军潜艇学院研制的一款复合同振式矢量水听器,它利用三轴压电式加速度计拾取质点振速,得到x、y、z三个矢量通道信号;球体腰部压电陶瓷管用来拾取声压标量p值。球体内空隙部分则采用聚氨酯材料封装配重,以满足矢量水听器对密度和声阻抗的要求。“复合”含义是可共点同时拾取声压标量信号和三个正交通道的声速信号,“同振”含义是采用惯性测量原理获得振速(或振动加速度)信号。
3. 矢量水听器“8”字型指向性测试方法
在相同声压不同频率的水声信号激励下,矢量水听器输出的电压信号幅值会发生变化,它用来表征矢量水听器对水声信号频率的敏感程度(等效于幅频特性),即所谓的灵敏度。此外,矢量水听器需要对360˚的目标进行探测,因此需要测定当目标信号频率没有发生变化而方位角发生变化时,其输出信号的变化情况,即所谓的指向性。
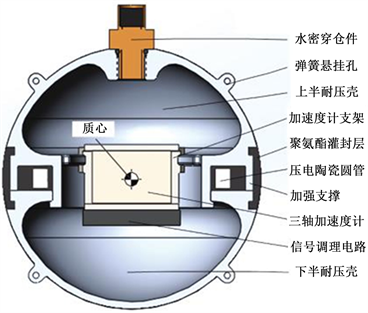
Figure 2. Combined co-vibrating vector hydrophone [4]
图2. 复合同振式矢量水听器 [4]
矢量水听器的灵敏度与指向性测试可以采用海试、湖试和消声水池等方法测试。为了降低测试测试成本,目前多采用驻波管(Stationary wave pipe)测试方案。如图3所示,压电发射换能器从装满水的驻波管底部发射频率与振幅可调声波,当声波传递到水与空气界面发生反射,在驻波管内产生波腹和波节有规律交替变化的驻波。经过水声学设计,驻波管在不同深度上的声场稳定可控,这是可以用驻波管代替室外测试的基本物理学原理。
在测试水听器灵敏度时,将矢量水听器和标准水听器悬挂于驻波管内,水听器的待测通道坐标轴平行于驻波管中轴线并指向发射换能器。保持换能器发出的声波振幅不变而频率发生变化,记录下待测通道和标准水听器的输出电压,通过比较即可得到矢量水听器待测通道灵敏度曲线。
在测试矢量通道指向性时,将矢量水听器悬挂于可以360˚旋转装置上,同时确保待测矢量通道的坐标轴平行于驻波管中轴线并指向发射换能器。设定发生换能器发射声波的频率和幅值保持不变,记录下旋转装置每步进一定角度(典型值为1˚)对应待测通道输出电压信号的幅值,最后做归一化处理并用dB表示,即可得到该频点处矢量通道的指向图。
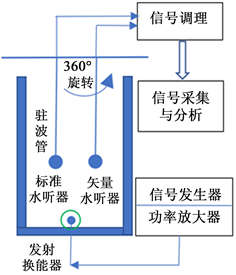
Figure 3. Schematic diagram of sensitivity and directivity of vector hydrophone
图3. 驻波管测试矢量水听器灵敏度与指向性示意图
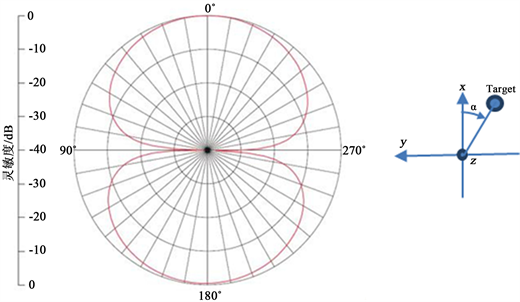
Figure 4. x-Channel “8” type directivity of a vector hydrophone @ 500 Hz [4]
图4. 矢量水听器x通道“8”字型指向性@ 500 Hz [4]
某矢量水听器x通道500 Hz的“8”字型指向性如图4所示,当目标方位角(与x轴的夹角) α = 0˚或180˚时(对应12点钟和6点钟方向) x通道输出信号幅值达到最大值;当目标机动到90˚和270˚方位角时(对应9点钟和3点钟方向) x通道输出信号幅值达到最小值。可见,矢量通道输出信号的强弱反映了目标方位角的变化,呈现出一种对目标方位角敏感的特性。故“8”字型指向特性赋予矢量水听器空间滤波器的效果,对偏离矢量轴方向的噪声与干扰具有空间滤除作用。这与360˚无方向性的标量水听器形成了鲜明对比。若对x、y、z正交矢量通道信号进行融合,可实现更加精准的DOA方位估计。
4. 矢量水听器DOA定位原理
DOA波达方向定位是矢量水听器的重要应用。简单回顾一下传统声压水听器的测向原理,以便与矢量水听器测向原理做对比。如图5所示,单只360˚无方向性的声压水听器难以完成测向任务,一般采用阵列模式。以最简单的二元阵列为例,设阵元间距为d,远场平面波入射角为α,显然,声波抵达阵元的声程差为
。考虑单频声源波长为λ,则阵元接收信号的相位差为:
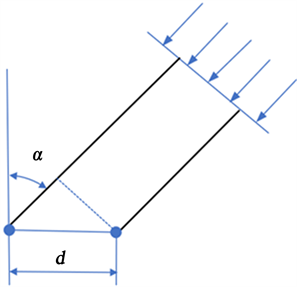
Figure 5. DOA schematic diagram of binary array
图5. 二元阵测向示意图
(3)
可见,通过测量相位差
即可换算出目标方位角
,这可由鉴相器电路完成。需要指出的是,该种测向方法对构成阵元的水听器的动态特性尤其是相频特性一致性要求苛刻,易受海洋环境噪声的影响。
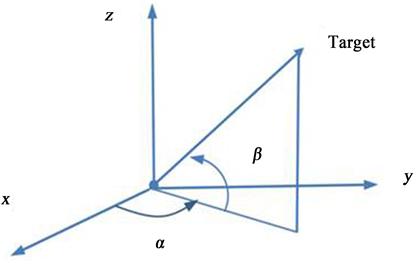
Figure 6. Spatial position diagram of sound source and vector hydrophone
图6. 声源与矢量水听器的空间位置示意图
矢量水听器可共点同时测量出质点三维振速信号,理论上一只矢量水听器即可实现目标方位角和俯仰角的估计。如前所述,当声源波长远大于矢量水听器尺寸时,可以将矢量水听器简化为一质点。如图6所示,以矢量传感器所在质点为坐标原点,建立笛卡尔空间坐标系。其中,
为目标声源方位角,
为俯仰角。质点振速v是一个三维空间矢量:
(4)
式中,由空间几何关系得:
(5)
(6)
(7)
式中,vx,vy,vz是质点振速三个正交轴向分量,可由矢量水声器内部灌封的三轴振速传感器测得。由此不难推导出目标的方位角和俯仰角分别为:
(8)
(9)
上式表明,采用单只矢量水听器即可完成目标DOA估计,这对减小声呐阵列尺寸有重要的理论参考价值。在海试中,多以此为基本原理,利用复声强法和直方图统计法进行更加精确的方位估计务 [3]。
5. 矢量水听器姿态补偿问题
如前所述,矢量水听器为了保持一种自由边界条件,需要弹性安装在浮标上,故容易受到海洋洋流的冲击而产生姿态倾斜与偏转等现象。此时,按照(8)~(9)式推算目标方位角与俯仰角会与真实值产生较大偏差。因此,有必要根据矢量水听器自身姿态变化情况进行坐标变换和数据融合,以得到更加可靠的目标方位信息。
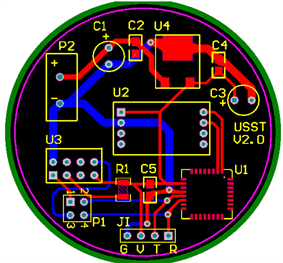
Figure 7. IMU PCB of vector hydrophone
图7. 笔者研制的矢量水听器姿态测量PCB线路板
图7是笔者研制的一款矢量水听器姿态测量PCB印刷线路板,它由三轴MEMS加速度计和三轴陀螺仪构成IMU惯性测量单元。可输出矢量水听器俯仰角,航向角和横滚角信息,以便与水听器矢量通道的数据进行融合,目前正在进行水池试验。海军潜艇学院已对此进行了海试试验 [4] [5],验证了水听器姿态信息与矢量通道信号融合的必要性。海试时发射舰和接收舰相距8.2 km,发射舰相对接收舰的GPS推算方位角为165˚。单只矢量水听器吊放于接收舰舷侧10 m水深处,单频750 Hz声源吊放在发射舰舷侧10 m水深处。试验结果表明,未进行矢量水听器姿态补偿时,方位角估计与GPS推算值有较大偏差且振荡明显;采用姿态补偿后DOA估算方位角与GP计算数值吻合度较高。
6. MEMS矢量水听器
近年来随着MEMS制造工艺的发展,陆续出现了将MEMS技术应用到矢量水听器的研究报道 [6] [7] [8] [9] [10]。在体积,功耗和灵敏度等方面,MEMS矢量水听器较传统的压电式和磁致伸缩式矢量水听器具有明显优势,已成为矢量水听器领域一个新的研究热点。
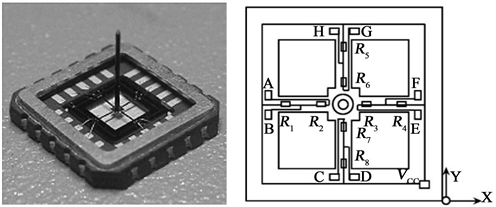
Figure 8. Layout of biomimetic ciliated MEMS piezoresistive vector hydrophone and its varistor [6] [7] [8]
图8. 仿生纤毛MEMS压阻式矢量水听器及其压敏电阻布置图 [6] [7] [8]
如图8所示,中北大学电子测试技术重点实验室从鱼类感知水流速度的侧线纤毛仿生结构得到启发,采用MEMS工艺研制了一款压阻式仿生矢量水听器 [6] [7] [8]。一根约100 um长的悬臂式空心玻璃管安装在活动基座上,用以模拟纤毛结构。在基座0˚,90˚,180˚和270˚方位角上分别布置一根硅微悬臂梁,在4根硅微悬臂梁的根部和末端采用MEMS工艺共部署8只压敏电阻,构成2个惠斯通电桥。当空心玻璃管受到某个方向上的声波激励时,会产生同频同向振动,引起压敏电阻阻值变化,即可通过惠斯通电桥输出电压信号。对2个惠斯通电桥输出信号进行解析可得x,y两个方向上的质点振速。
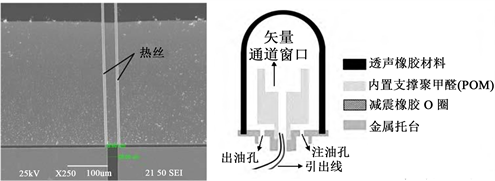
Figure 9. Vibration velocity sensitive structure and packaging of hot wire MEMS vector hydrophone [9] [10]
图9. 热线式MEMS矢量水听器振速敏感结构及其封装 [9] [10]
如图9所示,中国计量大学和电科集团第三研究所等单位基于“热场–流场耦合测速原理”研制出一款“热线式MEMS振速型矢量水听器” [9] [10],具有良好的低频灵敏度,引起了业界的广泛关注。质点振速敏感结构为两根微间距铂丝,两根铂丝既是加热单元也是传感单元,可以实现0.3 m/s以下质点振速的测量。工作时,在两根微间距金属铂丝上施加直流电源,电流通过金属铂丝产生焦耳热。无声波入射时,金属铂丝作为热源向四周空间热扩散形成稳定的温度场,两根金属铂丝具有相同的初始温度;当有声波入射时声场传播引起媒介(蓖麻油)质点振动,遂与两根金属铂丝产生热对流,处于声波入射方向上下游的两根铂丝产生温度差
。温差
又引起两根铂丝电阻值的变化,可通过惠斯通电桥输出电压信号。在声阻抗设计方面,该款矢量水听器外壳采用聚氨酯材料,内部用蓖麻油灌封。这两种材料的声阻抗均与海水的声阻抗接近,有利于提高传感器灵敏度。
7. 结束语
随着我国经略海洋和深蓝海军的战略实施,对水下敏感目标的探测愈发重要。矢量水听器可共点同时测得水下声场声压和振速信息,其“8”字型空间指向性,为研制高信噪比SNR声呐系统提供了新的思路。可以预见,随着矢量水听器技术的不断发展以及与MEMS技术的深度融合,其在海洋探测与军用领域中的应用会更加广泛。本文在参考大量文献资料的基础上,着重对矢量传感器的诸多共性问题,譬如矢量水听器声阻抗、指向敏感性、DOA方位估计与姿态补偿问题的物理含义进行了阐述,以期对声呐探测技术人员有所启发。
致谢
本文在撰写过程中参考了国内外学者的大量文献资料,限于篇幅无法一一列出,谨向文献作者表达谢意。
基金项目
本文工作获得2021年度上海理工大学一流本科系列教材建设项目资助。