1. 引言
三维激光扫描技术(Three-Dimensional Laser Scanning)是一种精度较高的数字化立体量测手段。激光扫描仪通过向目标量测物表面发射激光,收集反射信息,快速获得高分辨率、高数字化的被测物体表面的三维点云数据(Point Cloud)。随着三维激光扫描技术的发展,其在隧道工程中的应用越来越广泛,可用于隧道的超欠挖分析、平整度分析、结构厚度分析、工程量计算甚至监控量测等。
在三维激光扫描技术应用于变形测量时,点云的配准成为影响测量精度的重要指标之一 [1]。点云数据配准,即寻求源点云(Source Point Cloud)与目标点云(Target Point Cloud)间的旋转和平移变换。Besk [2] 等提出的迭代最近点法(Iterative Closest Point, ICP)是点云精配准领域最为主流的算法,ICP算法基于迭代原理获取两期点云之间的一致性点集并通过目标损失函数评估、更新变换矩阵来完成配准;ICP算法本质上是一种局部性算法,在没有理想的初始姿态的情况下容易陷入局部最优或配准失真。因此,用于计算初始姿态的全局配准算法对于点云配准具有重大意义。
目前,国内外对于全局配准算法的研究可分为两类:基于分支边界或基于一致性关系。在基于分支定界的配准方法研究方面,Bustos等 [3] 分析了基于BnB配准算法效率的主要因素,并提出了一种新颖的可进行快速评估的边界函数,该方法有效提升了算法效率。Yang等 [4] 提出的Go-ICP算法利用内外层BnB嵌套模式计算目标损失函数的上限和下限,从而在确保全局最优性的同时提高了算法的效率;2019年,Rusinkiewicz等 [5] 人提出了一种基于ICP迭代的对称性目标损失函数,能够对配准结果进行快速评估,从而提升收敛速度。
在利用一致性关系的配准方法研究方面,依赖于点云局部特征描述与匹配获取一致性关系的配准思路占据了很大比重。由于不同期点云通常仅在部分区域表现出较高的特征吻合度,因而需要利用诸如采样一致性(Random Sample Consensus, RANSAC) [6] 等具备筛选“外点”功能的算法刨除错误匹配,估算变换矩阵。Chen等 [7] 于1998年最早将RANSAC算法应用于三维点云配准中,基于RANSAC的点云配准方法对点云的初始姿态没有要求,即使在两片点云重叠度比较低的条件下仍然可以获得较优的配准效果。对于这类全局配准算法而言,核心问题在于局部几何特征的描述及匹配。
目前,对于配准算法的研究已较为深入,但针对于隧道点云等大型复杂模型配准的深入研究较为少见。配准结果对最终测量结果影响极大,初始姿态更是精配准取得良好结果的前提。目前,粗配准技术在隧道点云配准研究较少,且未给出常见粗配准算法具体表现。
本文针对复杂本文针对复杂环境下隧道施工期扫描点云特点,选取某隧道不同时期点云数据为实验数据,通过对两种配准算法进行实验,得出适用于隧道点云的粗配准算法,为三维激光扫描在隧道工程的应用打下了良好的基础。
2. 点云配准
2.1. 点云配准研究概述
由于隧道自身结构变形、不同时期扫描参数的差异、隧道内环境变化等客观因素,不同时期扫描获得的隧道点云数据必定存在一定的差异。点云配准过程即寻求一个包含平移和旋转的刚性变换(Rigid Transformation),使得不同时期的点云数据的空间位置差异最小化。
基于点云特征匹配的点云配准方法一般可分为全局配准(Globol Registration)和精配准(Refine Registration)两种。全局配准旨在获得一个较好的初始姿态(Initial Transformation),使得目标点云与源点云在空间中呈大致相似的姿态。而精配准比全局配准具有更高的配准精度,能够获得较好的配准结果,但是精配准需要将初始姿态作为输入参数。初始姿态是否理想极大地影响了精配准的效果,因此完整的配准算法应首先通过全局配准获取良好的初始姿态,再利用精配准实现高精度的配准效果。
2.2. 点云法线估计
点云法线(Normals)是点云模型的重要特征之一,对于配准点云模型具有十分重要的意义。对于给定的空间曲面,通常用正交于曲面的向量来计算曲面上某一点的法线。而点云数据本质上是目标量测物真实表面的一组空间点样本,并未构成光滑、连续的表面。
计算目标对象处法线的具体方法如下:
1) 对于待估计法线点云模型中的任一点
,通过邻域半径搜索(Radius-Search)结合kNN算法(k-Nearest-Neighbors)获取其邻域内的近邻点集:
2) 根据邻域计算质心
:
3) 使用主成分分析原理(Principal-Components-Analysis, PCA)构建协方差矩阵cov:
式中,k为点
邻域内点数,
为cov的第j个特征值,
为协方差矩阵的第j个特征向量;
2.3. FPFH点云描述子
描述子考虑了邻域内各点法矢量方向之间的各种相互关系,以期最大程度地刻画点云数据间的拓扑关系,用来描述点云的几何特征。
Rusu等 [8] 于1995年提出了FPFH描述子,该描述子对任一目标对象点的刻画都囊括了该点及其邻域内点的法线估计、法线特征、平均曲率等特征,上述信息构成的高维坐标显然非常适合利用高维超空间进行描述和处理,FPFH描述子计算图如下图1所示。特征高维超空间的生成显著依赖于邻域内各点的法线估计质量。

Figure 1. FPFH descriptor calculation diagram
图1. FPFH描述子计算图
FPFH的计算方法如下:
1) 对于邻域内任两点点
、
,及其对应的法线
、
,根据下式选定源点
与目标点
,将上述两点构成的直线与法线的夹角较小的点作为源点,并以此建立坐标轴。
2) 将上述中的源点
为为坐标的原点,构建如图2所示坐标系,其中u,v,w的计算方法如下:
式中,
为
的法向量。

Figure 2. FPFH local coordinate system
图2. FPFH局部坐标系
3) 根据图2中的局部坐标系,已知点
、
,及其对应的法线
、
,根据下式计算3个FPFH特征:
4) 建立点
的特征直方图,需要先将所有点对
所对应的(
)特征用直方图表示。对(
) 4个特征的取值进行区间划分,假设划分为m个区间,那么直方图的横轴就会形成m4个分布区域,统计各分部区域内点的个数,即完成PFH特征直方图的计算。其中,
表示的为向量之间的点积,其取值在−1到1之间。
3. 全局配准研究
目前,RANSAC以及快速全局配准算法(Fast-Global-Registration, FGR)为全局配准算法中主流方法。通过选取某隧道三期扫描点云数据,进行降噪去飞等预处理后导出模型,以该模型为验证集,对比RANSAC以及FGR配准效率及配准精度,以期获取最优算法。隧道点云模型基本信息如表1所示:

Table 1. Experimental cloud model information
表1. 实验点云模型信息
图3和图4为用于配准实验的三期隧道点云模型,由于施工期隧道内环境复杂,不同时期的隧道地面部分由于堆放杂物而差异巨大,会对配准形成极大干扰,因此在对点云切片进行预处理时,去除掉了隧道模型的地面部分,只保留了上部的主体结构。
用于实验的3期点云数据中,I期点云模型较为理想,源点云中噪声很少,扫描时仅施作了初支,未施作二衬,扫描仪距此处断面距离较远,点云分布密度较低;II期点云,在扫描时隧道已施作二衬,且有衬砌台车停放在此处,源点云中包含了大量的来源于衬砌台车的噪点;III期点云在扫描时隧道内布置了通风管道,隧道的部分边墙受到遮挡,扫描时扫描仪距此处断面距离较近,点云分布密度较高。
分别对3期点云进行预处理后,将后期点云作为源点云,前期点云作为目标点云,分别用两种全局配准算法进行配准实验,比较算法稳健性、算法效率及配准精度。其中算法效率通过算法执行计时进行表征,配准精度则通过以下两项指标进行度量:
1) 目标重合度(Fitness)
目标重合度是基于一致性点集的配准精度指标,表示配准结果中的一致性点集中的点数与目标点云总点数的比例关系,目标重合度越高,则配准结果越优异。
2) 均方根误差(RMSE)
即一致性点对(Sets of correspondence)的均方根误差,公式如下:
式中,n为一致性点对的数量,
为为配准后点对间的欧氏距离,
为空间点对间欧氏距离的真值。均方根误差越小,则配准结果精度越高。
利用上述隧道点云模型进行实验,并采用目标重合度及均方根误差对配准结果进行评价,实验如下:
1) 实验I:算法稳健性实验
由于I期点云模型为隧道尚未施作二衬时扫描获取的点云数据,故其几何特征与已施作二衬后扫描得到的II、III期点云差别较大,以此验证两种配准算法在源点云与目标点云特征重合度较低时的配准效果及算法稳健性。本实验以I期点云为目标点云,III期点云为源点云,分别通过RANSAC算法和快速全局配准算法进行配准测试,比较二者的配准表现。
实验结果如下图5和图6所示,图中目标点云(I期)为蓝色,源点云(III期)为绿色:

Figure 5. RANSAC algorithm distribution results—Experiment I
图5. RANSAC算法配准结果——实验I
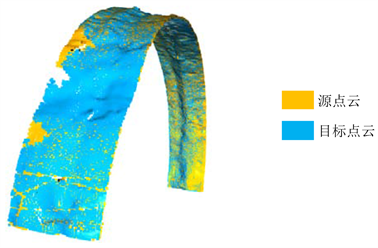
Figure 6. FGR algorithm distribution results—Experiment I
图6. FGR算法配准结果——实验I
及配准精度,以期获取最优算法。隧道点云模型基本信息如下:
Table 2. Global dispute experiment I
表2. 全局配准实验I
表2为本次全局配准实验结果,从算法效率方面分析:快速全局配准最短用时0.555 s,最长用时0.617 s;RANSAC配准最短用时7.771 s,最长用时9.763 s;二者在算法效率上几乎有一个数量级的差距,快速全局配准算法在算法效率上显著由于RANSAC算法。
从配准精度方面分析:快速全局配准算法的平均目标重合度为0.258,平均均方根误差为0.037;RANSAC算法的平均目标重合度为0.00259,平均均方根误差为0.0354;快速全局配准算法在配准精度上也较RANSAC算法更优。
从算法稳健性分析:在源点云与目标点云差异较大的配准条件下,快速全局配准算法仍能够获得不错的配准结果,源点云和目标点云在空间中实现了大致的对齐;RANSAC算法在6次相同参数的配准实验中失败了2次,配准结果严重失真,故算法稳健性上全局快速配准算法也优于RANSAC算法。
2) 实验II:算法精度对比实验
本次实验采用的II、III期点云均为施作二衬后的隧道断面点云模型,二者经过预处理后点云局部特征吻合度较高,利于全局配准,因而无论RANSAC算法或是快速全局配准算法,所得配准结果都具有相当稳定的成功率。图7和图8为本次精度对比实验的配准结果,图中蓝色点云为目标点云(II期),绿色点云为源点云(III期)。
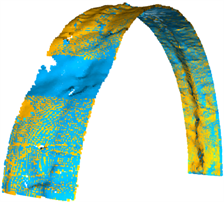
Figure 7. RANSAC algorithm distribution results—Experiment II
图7. RANSAC算法配准结果——实验II

Figure 8. FGR algorithm distribution results—Experiment II
图8. FGR算法配准结果——实验II
Table 3. Global dispute experiment II
表3. 全局配准实验II
表3为全局配准实验II的实验结果。由表中数据可知,相同距离阈值下,当源点云与目标点云局部特征吻合度较高时,快速全局配准算法与RANSAC算法都具有很高的配准成功率,多次重复实验所得的配准结果也几乎完全一致。对于算法耗时而言,FGR算法平均用时为0.629 s,RANSAC算法的平均用时则达到8.273 s,二者在算法用时上具有数量级差异;对于配准精度而言,相同距离阈值下,FGR算法的目标重合度达到98.4%,RANSAC算法仅为11.5%,且FGR算法所得配准结果的均方根误差也显著低于RANSAC算法。
这是因为RANSAC算法是基于随机采样的迭代型算法,由采样子集计算出的当前变换矩阵需要通过其余点云数据来验证其正确性,因此会有大量算力被应用在最近邻点以计算点云间的欧式距离,而对于正确性不高(或者说精度不足的)的变换矩阵在比较后即被舍弃,致使大量的算力浪费,在某种程度上,这也使得迭代的精度降低。
相较而言,FGR算法在内部循环中不执行最近点查询,可以节约大量算力,这导致FGR算法在配准速度上远超RANSAC算法,同时,FGR算法对于存在部分重叠的点云表面数据具有良好的配准效率和配准精度,该算法的扩展可以对许多部分重叠的表面进行联合全局配准,通过这种方式,FGR算法在配准稳健性与配准精度上可以获得更好的表现。
综上所述,全局配准算法无论在稳健性、算法耗时或是配准精度方面都优于RANSAC算法,全局快速配准算法(Fast Global Registration)作为全局配准算法用于获取理想的初始姿态更加适用于隧道工程点云粗配准之中。
4. 结论
基于三维激光扫描的隧道点云数据,通过点云预处理得到实验模型,使用不同全局配准算法对点云数据进行配准,以算法用时、目标重合度和均方根误差作为判断标准,在实现点云初始姿态配准的前提下,得到以下结论:
1) 在算法耗时方面:FGR配准算法最短用时0.555 s,最长用时0.617 s;RANSAC配准算法最短用时7.771 s,最长用时9.763 s;FGR算法在耗时方面明显优于RANSAC算法。
2) 在算法稳健性方面:FGR配准算法在各种不利条件下均能配准成功,而RANSAC算法在6次配准实验中失败2次,配准结果严重失真;FGR算法在稳健性方面明显优于RANSAC算法。
3) 对于配准精度而言,相同距离阈值下,FGR算法的目标重合度达到98.4%,RANSAC算法仅为11.5%,且FGR算法所得配准结果的均方根误差也显著低于RANSAC算法。
本文不足之处在于仅使用了全局配准,仅得出较好的初始姿态,对于隧道点云精配准及变形测量未做出充分研究,无法直观地表现全局配准对于隧道三维激光扫描变形的影响。
基金项目
中国中铁股份有限公司科技研究开发计划项目(2019-重大-08-03)。
NOTES
*通讯作者。