1. 引言
车辆在存在部分车道封闭的高速公路施工路段行驶时,驾驶员不得不在车道变窄处上游适当的位置进行合流,不同的上游流量和交通组成情况下,车辆合流位置的时空分布特性直接决定了高速公路运行效率和交通安全的高低。国内对于合流控制通常采用静态警告标志提醒车辆车道变窄 [1],但是对于合流位置的考虑欠妥,没有形成一套针对不同交通特性的合流控制策略,更没有针对策略的有效性进行过相关验证 [2]。
国外车道汇合控制策略近几年大体上经历了静态提前汇合控制(SEM)、静态延迟汇合控制(SLM) [1]、动态提前汇合控制(DEM)、动态延迟汇合控制(DLM) [3] 四个发展阶段。SEM和DEM只有在不拥挤的交通条件下才能改善作业区的性能,并且系统不能适应交通状况的实时变化,SLM和DLM可以改善拥挤情况下交通运行效率 [4] [5] [6],但是同时会增加汇合点的冲突和事故数。若能将提前汇合和延迟汇合在时空分布上有机的结合起来,不失为一种智能高效的车辆合流控制策略,本文立足于上述目的,制定了一套高速公路合流区车辆智能汇合控制策略并进行了仿真和相关现场实验验证。
2. 高速公路合流区车辆智能汇合控制策略研究
本文基于车辆汇入间隙理论和高速公路通行能力模型制定了一套高速公路合流区车辆智能汇合控制策略,适用于如下两种情况:
① 施工等原因导致高速公路单向两车道封闭一车道;
② 施工等原因导致双向四车道高速公路封闭半幅利用对向两车道双向通行的情况。
如下图1所示,通过前端交通流检测系统触发控制策略,借助3G数据传输技术实现动态可变信息的实时发布,诱导车辆在最优位置合流,以减少交通冲突,提升通行效率,从而充分利用有限的道路空间,实现交通运输系统的高效运行。
根据《公路通行能力规范》(报批稿) [7] 以及国家科技支撑计划“山区公路养护路段交通安全综合保障技术与装备”和“高速公路改扩建工程施工作业区交通组织技术”专题的研究成果,高速公路作业区的基本通行能力为1800 pcu/h/ln,即在双向四车道高速公路封闭一车道施工的情况下,当车辆在过渡区

Figure 1. Diagram of intelligent merge control strategy in work zones
图1. 作业区车辆智能汇合控制策略示意图
合流至可通行车道时,过渡区车流量不应高于1800 pcu/h/ln,若高于该值,即超过了作业区的通行能力,将会产生排队和拥堵,不同的高速公路合流区实际通行能力值也不同,考虑到重车比例、作业区工作强度、光照条件和车道封闭形式等因素的影响,通行能力有所折减,具体折减模型如下式所示。
根据以上通行能力影响因素的分析,建立如下的折减系数模型:
(式1)
式中:fn——车道数修正系数,取0.83。
——车道宽度修正系数。
——侧向净空修正系数。
——交通组成修正系数。
——限制速度修正系数。
——施工作业强度修正系数(有作业区情况下此值有效,无作业区情况下取1)。
——光照条件修正系数。
高速公路单向有2车道或以上通行的施工区,基准通行能力Cbs为1800 pcu/(h∙ln)。
上述参数的取值是根据实际道路的条件决定的,具体参见《公路通行能力分析细则》(报批稿)。
车道变窄前会存在过渡区,过渡区上游合流车辆在什么位置执行合流操作才能保证通行效率最大呢?项目组利用汇入间隙理论研究最优的合流车辆数配比。
假设:通行车道上的车辆优先通过路口;交通量不大,车辆之间的间隔分布符合负指数分布;当间隙大于临界间隙t0时,封闭车道上的车辆可以汇入通行车道。并且,当封闭车道上车辆跟驰的车头时距小于t秒时,封闭车道上的跟驰车辆可以连续通过。
根据以上假设,利用概率论,可以推算出封闭车道上的车辆每小时能汇入通行车道的数量为:
(式2)
式中:
——通行车道上的交通量,pcu/h;
——封闭车道上可能通过的车辆数,pcu/h;
q——
,pcu/s;
t0——临界间隙时间;
t——封闭车道上车辆连续汇入通行车道的跟驰车头时距,t = 3 s;
——上游车辆到达率,pcu/h。
临界间隙t0和大车率有关,本项目取3 s、4.25 s和6 s三种情况进行研究,其值越大说明大车率越大,即可穿插间隙越大。
下表1中给出了上游车辆数为1800 pcu/h、1600 pcu/h、1400 pcu/h、1200 pcu/h时的最优合流车辆配比数。

Table 1. Optimal mixing ratio with different gaps and vehicle arrival rate
表1. 不同汇入间隙和车辆到达率下的最优合流车辆配比数
封闭车道上的交通量和上游车辆到达率随通行车道上的交通量的变化情况如下图2~4所示。
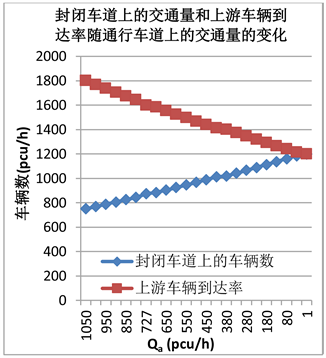
Figure 2. Change of the traffic volume in the closed lane and the upstream vehicle arrival rate with the traffic volume on the traffic lane when t0 = 3
图2. t0 = 3时封闭车道上的交通量和上游车辆到达率随通行车道上的交通量的变化
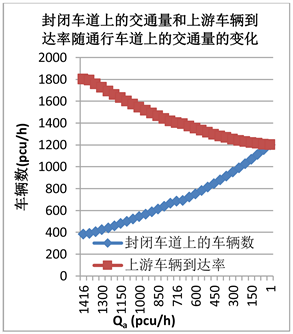
Figure 3. Change of the traffic volume In the closed lane and the upstream vehicle arrival rate with the traffic volume on the traffic lane when t0 = 4.25
图3. t0 = 4.25时封闭车道上的交通量和上游车辆到达率随通行车道上的交通量的变化

Figure 4. Change of the traffic volume in the closed lane and the upstream vehicle arrival rate with the traffic volume on the traffic lane when t0 = 6
图4. t0 = 6时封闭车道上的交通量和上游车辆到达率随通行车道上的交通量的变化
通过合流间隙理论得出结论,当上游车辆到达率一定时大车率越大(t0越大),则封闭车道上的车辆越少,即应建议车辆尽早汇入通行车道;且车辆到达率越大,通行车道上的车辆越多,封闭车道上的车辆越少;对于上游到达率较小(≤1200 pcu/h)的情况,车道的分配可以更为随意一些,不必为追求通行效率而采取合流控制措施。因此,由上述三幅图可以判定,拥挤状态的初始阈值可认为是1200 pcu/h。
3. 合流控制策略的制定和实施
根据施工区车辆合流特性,并基于汇入间隙理论的最优合流车辆数配比,可得出:当流量不大时,对合流进行控制的意义不大,因此,汇合控制需要定义一个初始的拥挤状态来启动智能汇合控制系统;当流量较大时,随着大车率的增加,通行车道的车辆比例也增加,即车辆在强制汇入点汇入的比例减小,尽量鼓励车辆在汇入点上游完成合流,即第三、四、五块可变信息标志处合流;而当上游车辆的到达率已经超过单车道的通行能力时,排队不可避免,那么就应该充分利用道路空间,并鼓励车辆在汇入点有序合流,即在第一、二块可变信息标志处合流,以达到通行效率最高的目的。基于前端交通信息高精度检测设备收集的速度、排队长度和流量参数,施工区过渡段车辆智能汇合控制策略可以定量界定。
拥挤状态的初始阈值:流量 ≥ Q0,即Q0为1200 pcu/h对应的不同交通组成下的交通量(辆/h)。因此,合流区车辆智能汇合控制策略的工作程序如下:
步骤一:确定上游交通量(pcu/h),如下所示:
大车率为a,车辆折算系数为3。
(式3)
Q为转化为pcu/h的交通量,QA为实际交通量,单位为辆/h。
步骤二:确定实际通行能力Q4,单位为pcu/h,如下所示:
(式4)
参数意义同上。
步骤三:确定合流控制阈值
① 当Q4 > Q0时,
(式5)
其中,Q0 = 1200 pcu/h
一级合流(Q > Q4):即在第一块可变信息标志处合流;
二级合流(
):即在第二块可变信息标志处合流;
三级合流(
):即在第三块可变信息标志处合流;
四级合流(
):即在第四块可变信息标志处合流;
五级合流(
):即在第五块可变信息标志处合流。
② 当
时,采取一级合流(
):即在第一块可变信息标志处合流。
其中,QA为检测器测得的实时车辆到达率(辆/小时),第一块可变信息标志距离作业区最近,位于作业区过渡段起点,第五块可变信息标志距离作业区最远。可变信息标志的间距均为100米。
4套路侧激光采集交通流信息,通过3G传输实现前端速度、排队等信息的实时发布,以及后端合流控制信息的发布。一方面路侧激光1-路侧激光4采集的信息可以动态实时显示在上游大荧可变信息板上,信息内容可以是当前速度和排队等。另一方面路侧激光1采集到的交通量信息可以触发控制策略,决定下游5块可变信息板显示的内容,实现交通信息的实时发布和车辆合流控制,保证合流区交通运行效率最优。
4. 合流控制策略的仿真验证
项目组成员利用PTV公司的VISSIM微观交通流仿真软件,针对作业区边通车边施工的情况进行了仿真实验验证。首先,结合实测数据对仿真模型进行了标定,通过对期望车速、减速区域、冲突区域和静态路径决策等参数的设置 [8],使过渡区断面分车道流量和速度与实测数据的误差均控制在10%以内,仿真截图如下图5所示。
项目组通过方案比选针对三种不同的合流措施开展仿真,并分析了交通流参数间的变化规律,对作业区过渡段合流区车辆智能汇合控制策略的合理性进行了全面的验证。
不干预不可换道即在车道变窄处上游不采取任何措施干预车辆的合流行为,不允许车辆随意换道,但是在车道变窄处除外;合流不可换道即在强制合流点(车道变窄处)上游分别间隔100米设置4处建议合流点,且使合流车辆数符合汇合控制策略的规定(比如当交通量刚好等于通行能力时在五个合流点的合流车辆数相等),但在除以上4处建议合流点和车道变窄处以外的其它位置禁止车辆随意变道合流;不干预可换道即在车道变窄处上游不采取任何措施干预车辆的合流行为,且允许车辆随意换道。
上述三种措施中合流不可换道是最接近前述制定的作业区车辆汇合控制策略的。
1) 交通量和平均速度的关系分析
通过大车率不变(25%)的情况下不断加载交通量的方式得出交通量和车道变窄处上游500米至下游100米各断面平均速度的关系。交通量越大,速度越小,且当交通量超过1200时,即达通行能力时,速度减小率变大。当流量大于通行能力时,不干预可换道下的各断面的平均速度下降最快,当流量小于通行能力时不干预可换道下的各断面的平均速度大于其它措施下的各断面的平均速度,但差值很小,基本上小于5 km/h。速度的大小直接关系到通行效率,从提高通行效率的角度来看,不干预不可换道和合流不可换道优于不干预可换道方案,因为速度变化稳定,尤其是在流量大于通行能力时。
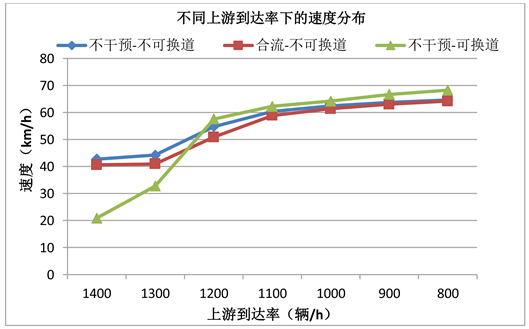
Figure 5. The speed varies with the amount of traffic
图5. 速度随交通量的变化
2) 不同交通量情况下的速度一致性分析
仿真获取交通量在800~1400辆/小时下三个方案合流区域从上游至下游附近共计9个断面的平均速度值,结果如下图6和图7所示,合流不可换道方案的速度一致性都优于其它两种方案的情况,具体表现在图中的曲线斜率和速度值波动的平缓程度,速度一致越好,曲线斜率越小,波动越平缓。因此,从速度一致性角度考虑合流不可换道措施优于其它方案。
3) 不同大车率情况下的速度一致性分析
仿真获取6种不同大车率情况下的三个方案合流区域从上游至下游附近共计19个断面的平均速度值,结果如下图8和图9所示,合流不可换道方案的速度一致性都优于其它两种情况,具体表现在曲线斜率和速度值波动的平缓程度,速度一致越好,曲线斜率越小,波动越平缓。因此,从速度一致性的角度考虑,合流措施优于其它两种情况。

Figure 6. Comparison of speed at different sections when the volume is 1000 pcu/h
图6. 交通量为1000时多断面速度对比
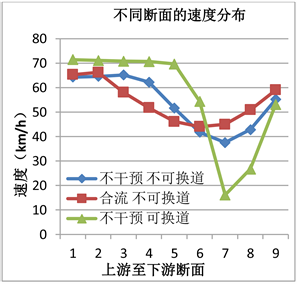
Figure 7. Comparison of speed at different sections when the volume is 1200 pcu/h
图7. 交通量为1200时多断面速度对比

Figure 8. Comparison of speed at different sections when heavy vehicle rate is 0.1
图8. 大车率为0.1时的断面速度对比
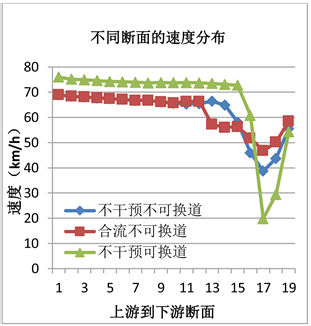
Figure 9. Comparison of speed at different sections when heavy vehicle rate is 0.2
图9. 大车率为0.2时的断面速度对比
4) 结论
三种措施中不干预可换道速度一致性最差,尤其是当交通量大于通行能力时速度减少非常明显;合流不可换道措施速度一致性最好;从平均速度大小来看,当交通量小于通行能力时不干预可换道措施速度最高,当交通量大于通行能力时不干预不可换道措施速度最高,但三种措施差值均在5 km/h以内。基于速度一致性分析可以明显的看出合流不可换道措施的优势,而其它方面的分析,三种方案差别均不大,;因此,仿真验证认为合流不可换道即最接近于作业区车辆合流控制策略的方案为最佳方案。
5. 合流控制策略的现场实验验证
通过在安徽合六叶高速施工控制区的警告区和过渡区 [9] 分别设置多个“合流”、“直行”、“交替通行”和摄像头标志的方式进行了对比实验,对于汇合控制策略进行了静态演练,并验证了其有效性。实验标志摆放位置示意如下图10所示,其中红线代表安全锥摆放位置,灰色代表施工区封闭段。本次静态实验模拟的是车辆接近通行能力时的合流控制策略,即五级合流。
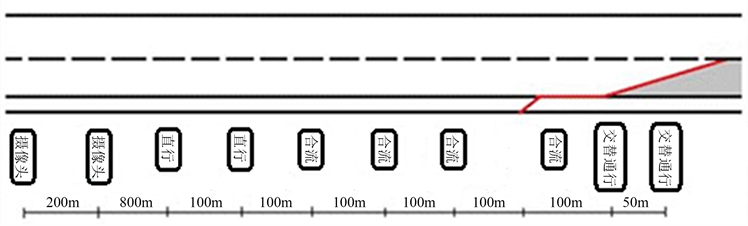
Figure 10. Diagram of static sign setting of vehicle merging
图10. 施工区车辆汇合静态标志设置示意图
上图中标志的具体版面如下图11所示。
通过对交通流和视频数据的分析和处理,即提取视频和交通流数据相互对应的有效数据,以小时为单位,以单向两车道高速公路封闭外侧车道为例,分别对实验前后交通流特性和合流特性进行了分析。合流车辆数是从过渡区渐变段起点上游20米处的断面开始测算,即在下图12中蓝色区域内换道合流,得到的是外侧车道合流至内侧车道的车辆数。
通过现场实验可以得出:
① 流量,即施工区上游车辆到达率最小时,合流车辆数也最小,而全部车辆的平均速度最大;合流车辆数最多时,速度最小,且内、外侧车道车速差最大,说明合流对车速影响很大;大车率最小时,外侧车道速度最大,内、外侧车道的速度差最小,说明合流对车速的影响最小。
② 实验的影响:起到作用,小车合流的比例明显减小,说明小客车驾驶员对标志的认知情况更为理想;从合流车辆数上来看,在流量较大的情况下,实验和未干预差异很大,实验效果理想,在流量中等的情况下,实验效果不好,这和动态汇合控制策略的预期结果刚好吻合,即车辆接近通行能力时采取五级合流效果最好,而流量中等时应采取其它级别合流措施。
③ 相似流量下实验和未干预情况下平均速度和合流车辆数的情况,如下面两幅图(图13、图14)所示:
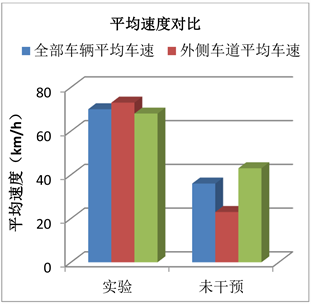
Figure 13. Comparison of average speed under similar volume
图13. 相似流量下的平均速度的对比
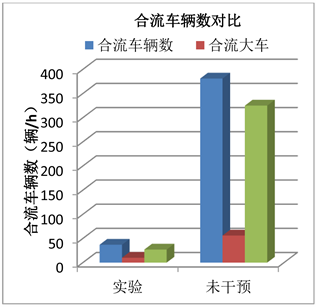
Figure 14. Comparison of the number of merging vehicles under similar volume
图14. 相似流量下的合流车辆数的对比
由于采取了合流控制策略,车辆在上游第一块合流标志处即采取合流措施,大大减轻了强制合流点的交通压力,合流车辆数和速度都明显增大,且小车对于合流策略的遵守程度更优。
上述结果表明:尽管现场实施的是静态车道控制,但依然对于合流过程中通行效率的提高起到了积极的作用,尤其是当作业区上游车辆到达率较大的情况下,可见最终要实施的基于动态情报板的智能汇合控制策略可以有效引导车辆在最佳位置合流,达到车辆在作业区安全高效通行的目的。
6. 结论
本文基于汇入间隙理论和通行能力模型对高速公路单向两车道封闭一车道以及双向四车道封半幅路段合流区车辆智能汇合控制策略进行了研究,给出了不同大车率、上游到达率和道路几何特性下的五级合流阈值,诱导车辆在最佳位置合流,并借助于方案比选通过VISSIM软件进行了速度一致性、流量和大车率等指标的微观交通仿真验证,以及五级合流下的现场静态标志实验验证。合流控制策略可提升车辆行驶的速度一致性,根据作业区上游到达率的不同,适时诱导车辆在上游不同位置合流,提升了强制合流点的交通运行效率,且策略对于小型车辆效果更优,具备一定的可行性和有效性,缓解了合流区的交通拥堵,降低了合流区交通安全风险,期望能够结合硬件设备使合流控制策略得到更好的推广和应用。
基金项目
交通运输部公路科学研究所(院)科技创新专项资金项目(2020-C302)。