1. 引言
近年来随着经济的发展,我国建设的桥梁越来越多,而桥梁的安全是关系国计民生的大事 [1]。桥梁的定期病害检测以及合理的保养维护是保证桥梁安全的有效措施。传统的桥梁病害检测有检测车、无损检测以及人工检测相结合,以上方式不仅检测速度缓慢,而且存在安全隐患 [2]。随着无人机技术的不断提高,无人机也被应用在更多的领域。将无人机技术应用在桥梁病害检测上,组成智能检测系统已然成为近年来研究的热点问题 [3]。
在无人机桥梁病害智能检测系统中,无人机的航线规划问题成为该系统的关键问题。近年来不少学者对无人机航线的问题进行研究。其中杨丽春为了提高无人机的自主任务能力,针对其飞行特征,开发了交互式规划以及实景仿真系统,满足了不同环境下的航迹规划以及模拟验证需求 [4]。哈尔滨工程大学的曲贺基于桥梁病害检测,分析了无人机航线规划的关键因素,详细进行了风场分析以及全覆盖算法研究 [5],为工程应用提供了指导。敬家炽通过研究无人机航线规划的影响因素 [6]:环境信息和约束条件,并结合改进人工势场算法,提出了一系列规划方式。最后以普巴绒特大桥为例,进行了仿真演示。以上学者的研究成果都为后续基于桥梁病害检测无人机的航线规划研究奠定了良好的基础,但是缺乏对于仿真系统研究的整合以及特定算法仿真研究系统。
为了方便系统、高效地进行桥梁病害检测无人机航线规划仿真研究,本文进行了以下设计:在桥梁病害检测应用背景下,先分析了无人机的飞行环境(主要是桥梁),针对环境特点选用了RRT规划算法并设计出了航线规划仿真GUI系统,可以简单高效地实现航线规划仿真,便于调节参数,直观规划过程。
2. 系统组成
该仿真系统由环境模块,算法模块和GUI设计模块组成了如图1所示。
环境模块主要是桥梁模型以及自然威胁构成:桥梁模型是规划主体,自然威胁来源于检测桥梁周围自然条件对无人机飞行构成的危险性。算法模块:选用基于采样点的RRT (Rapid-exploration Random Tree)快速扩展随机树为原型,进行仿真研究。GUI模块设计中,利用Matlab软件中的GUIDE设计环境,进行可视化界面设计,这也是该系统的关键点。三个模块共同完成无人机的航线规划,如图2所示。
2.1. 环境分析
本文着重考虑桥梁模型在实际应用中,对无人机航线规划的影响。通过对桥梁模型进行剖析以及转换,可实现三维空间转换成二维平面,减少计算量。如图3所示三位桥梁结构仿真图。
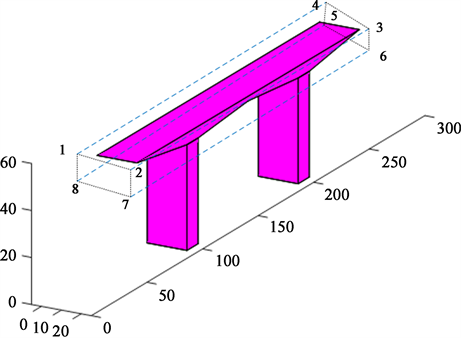
Figure 3. Bridge simulation model diagram
图3. 桥梁仿真模型图
由上图3可以看出,当进行桥体检测时,需对桥体进行全覆盖检测,待规划区域则为1~8顶点构成的长方体。应用几何知识,可将该长方体展开如图4所示。
利用上图方式,可将三维空间有效转换成二维,此方式将减小规划计算量,提高算法收敛速度。同时,当桥体高度较小,无人机从上表面可直接进入下表面,线段1-8、2-7、5-4、6-3较短。所以在进一步预处理时,将侧面面积等效为0,其等效图见图5。
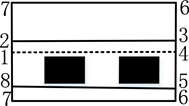
Figure 5. Pre-processing equivalence diagram
图5. 预处理等效图
2.2. 算法选择及简介
航线规划算法种类繁多,各有优缺点。涉及有关航线规划的算法,可以大致分成两大类:传统算法 [7],人工势场算法、蚁群算法、A*算法等;智能算法 [8],如遗传算法、神经网络等。智能算法通常需要大量的迭代计算,收敛速度较慢,且易于陷入局部最优。上述传统的航线规划算法较为复杂,在处理低维空间的路径规划上体现出一定的优越性,但是在实际运用中,随着维度的增高,缺陷明显:表达构建空间需占用大量计算资源。而基于采样思想的规划算法,RRT (Rapid-exploration Random Tree)快速扩展随机树,无需对环境进行建模且适合高维空间。此类算法在无人机、机械臂等高维空间上体现出明显优势 [9]。
RRT (快速扩展随机树)算法是一种可在多维空间高效进行路径规划的算法。RRT算法相比与其他算法复杂度小,可直接应用于非完整约束系统的规划。该算法主要由两部分构成:随机树的生长和路径的搜索。其随机树的生长过程为:
假设在一个位姿空间C中,输入:初始位置为Qint,目标位置是Qgoal;
Step 1:以Qint作为树的根,在任务空间中随机生成一个随机点Qrand;
Step 2:找到树中任意一个离随机点节点Qrand最近的叶节点Qnear,连接Qnear与Qrand;
Step 3:选择步长S,从Qnear点出发在与Qrand的连线上截取一段距离S,取该点为Qnew;
Step 4:检查Qnew是否在障碍物区域内,Qnear与Qnew的连线是否穿过障碍物。若是在障碍物区域内或不在区域内但连线穿过障碍物,则返回Step 2、3;若都无,则将Qnew加入到随机树中成为新的叶节点。
Step 5:随机树不断生长,直到新叶节点到达Qgoal或者离Qgoal距离在一个设定的范围内,这样随机树的生长结束。
在路径搜索中,从目标位置Qgoal开始,依次寻找父节点,直至到达初始位置Qint,这样生成一条从起始节点Qint到目标节点Qgoal的无碰撞路径,即最终生成一条包含目标节点的搜索树。随机树的扩展过程如下图6所示。
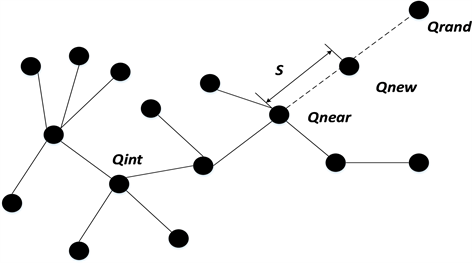
Figure 6. RRT algorithm growth process
图6. RRT算法生长过程
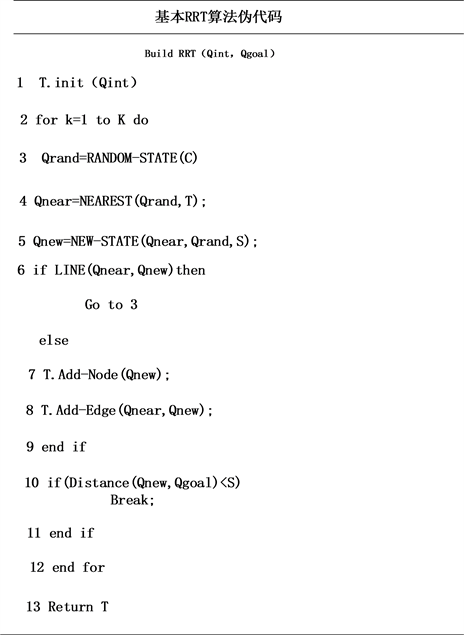
根据上述过程其RRT算法的伪代码如表1。
表1. RRT算法伪代码
2.3. GUI设计本设计的图形用户界面(GUI)是利用MATLAB中的GUIDE模块编写,主要针对RRT规划算法在航线规划中的交互问题。主界面如图7所示。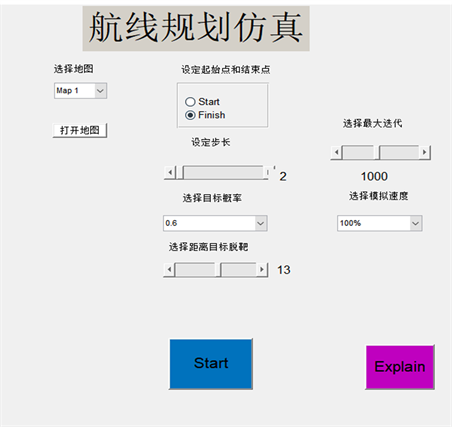
Figure 7. GUI main interface
图7. GUI主界面
面向RRT规划算法设计的GUI界面主要由以下几部分组成:算法部分、选择部分、显示部分、解释部分、调节部分。其具体结构框图如图8所示。
RRT算法航线规划GUI在使用时:第一步:选择载入地图,将预处理地图或绘制地图加载;第二步:依次设置起止点,设置参数(步长、目标概率、目标脱靶距离、最大迭代次数以及仿真速度);第三步:点击Start进行仿真。为了初学者更快清晰了解以及使用该GUI,该界面还设计了解释文档,点击Explain即可查看。
3. 仿真演示
这里以上述桥梁模型为例,经过转换桥地面的二维地图如图9,利用GUI打开地图。
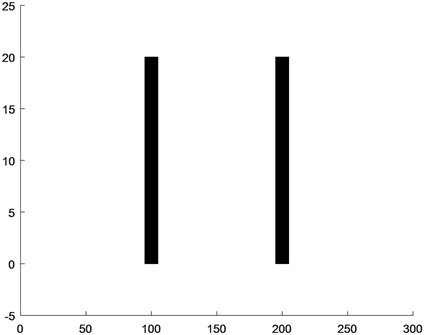
Figure 9. Equivalent diagram of the lower surface of the bridge
图9. 桥梁下表面等效图
有时桥梁病害检测需要对某些部位易生病害进行专项检测,此时通过GUI打开地图后,随机设定(70, 11)为起始点(绿色五角星),(155, 14)为目标点(红色五角星),设定扩展步长,目标概率,目标脱靶距离等参数。为了便于观察RRT算法的扩展过程,在仿真研究中还可以选择模拟速度。仿真模拟效果图如图10。
在仿真过程中可以通过MATLAB的命令窗口和工作区获取规划地图信息、规划距离、生长树节点等信息。根据仿真情况结合实际需求,调整参数,达到规划目的。经过以上实验仿真证明了该研究方案及仿真系统具有一定的实用性和可行性。
4. 总结
针对桥梁病害检测无人机的航线规划仿真研究现状,本文分析了基于桥梁病害检测的无人机航线规划仿真存在的问题以及构建一套仿真系统的必要性。根据桥梁病害检测的实际要求,首先进行了环境分析,为了减少计算量,利用等效变换进行转换,然后选择适合要求的基本RRT算法,进而设计基于RRT算法的GUI,最后进行实际仿真调试等方面实验,形成一套桥检无人机航线规划仿真系统,从而为后续研究工作提供了支撑。通过实验也证实了该系统的GUI设计在研究航线规划方面具有便捷性:只要将改进或设计的不同生长策略RRT算法脚本写入GUI中,就可以在线调试参数以及直观规划过程。
基金支持
校级科研项目:基于桥梁病害检测无人机的航线规划研究(ky202107)。
校级科研项目:基于图像处理与光纤AE传感器的桥梁裂缝检测(ky202102)。